一种复合驱动指关节设计与仿真
2019-09-19李阿为郗梦璐马翔宇刘家豪
李阿为,郗梦璐,李 玲,马翔宇,刘家豪
(西安航空学院 机械工程学院, 西安 710077)
随着社会的不断发展,机器人研究也在不断取得进步,其执行装置的精度也得到了提高。然而,机器人末端执行装置已不能满足复杂、多变的环境。因此,开发一种实用性强、可在各种复杂多变环境下进行快速工作的机器人灵巧手已经成为技术发展的必需。随着新型材料和新工艺的开发,越来越多的新型智能材料,如高分子材料、形状记忆合金(shape memory alloys,SMA)[1]等,受到了机器人领域科学研究人员及专家的肯定和关注,并慢慢代替了传统的电机驱动方式。1962年由Tomovic、Boni共同研发的Belgrade手最开始是为南斯拉夫的一位伤寒病患者而设计的,它被认为是世界上最早的灵巧手[2]。日本研发的Okada手采用电驱动缝式关节,灵活性有限,只能进行简单的重复性动作[3]。20世纪80年代,许多国家对于机器人灵巧手的研制开发都投入了大量的精力,诞生了以多自由度、可控制、具有多种感知功能为标志的现代意义上的灵巧手,如Utah/MIT手[4]、Stanford/JPL手[5]、styx手[6]等。我国从20世纪80年代后期开始研究灵巧手,代表有北航研制的BH系列灵巧手,包含BH-1、BH-2、BH-3、BH-4型等多种多指灵巧手[7]。文献[8-9]设计了一种机械灵巧手,满足了手指的基本使用功能。由于机械传动、驱动、传感、电子等方面技术和控制方法的技术局限性,减慢了灵巧手的发展节奏。总而言之,通过国内外现有的研究情况,可以发现存在诸多问题,比如驱动方式缺乏灵活性、自由度低、反应能力较慢等。大多数设计的灵巧手手指关节通常都会采用单一驱动的方式,这样的灵巧手驱动方式可靠性和抓取反应效率都比较低。本文设计了一种复合驱动指关节,驱动可靠性强,指关节的抓取反应效率也大大提高。
本文通过研究人手运动机理,对指关节进行结构设计,关节采用电机-SMA复合驱动。为区别电机与SMA两种驱动的方式,对其分别进行运动仿真。仿真结果表明:所设计的复合驱动关节满足设计要求。
1 结构设计
复合驱动是目前灵巧手开发的一个重要的研究方向。复合驱动指关节的设计涉及了许多方面,包括机械机构的设计、驱动系统的设计和控制系统的设计。为了提高指关节的反应速度及抓取效率,设计了一种SMA驱动器来和电机共同驱动以达到复合驱动的目的。电机驱动的输出位移大、运行可靠,但是电机的功重比较低,手指关节很难满足抓取反应速度的要求。形状记忆合金功重比较高、质量轻、驱动力大、反应快,使其能广泛应用于对机构质量、尺寸要求较严格的情况。但其能耗较高、工作效率较低,并且驱动回复位移较小。
手指的运动特点是由其自身的运动原因所导致的。一个人的手有5个手指:拇指、食指、中指、无名指和小指。大多数腕骨位于拇指所在的位置,并包含1个掌骨和2个趾骨。其他4个手指位于跟骨、指间骨和手指的末端,并且都包含一个掌骨。手掌的内部肌肉控制了手指的运动。手掌和手指关节与内部的肌肉组织连接,通过大脑中的运动神经运动信号来控制手掌的运动,在收缩时肌腱受到脑部运动中心的控制,产生有距离的拉动力,以控制手指各关节的运动(图1)。
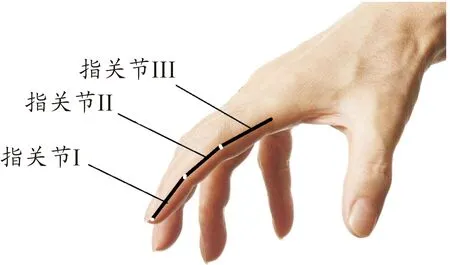
图1 人手关节
常用的机器人传动方式有齿轮传动、链传动、蜗轮蜗杆传动、皮带传动、平面连杆机构、差动机构等。皮带传动具备了构造简易、传动平稳无噪音、没有严格限制的配合距离等优点。丝杆传动效率高、精度高、有可逆性。本设计采用皮带传动、丝杆传动等传动方式。关节处采用皮带传动,电机与连杆的传动也采用皮带传动,形状记忆合金与连杆的传动采用丝杆传动。同时,参考人手的关节构造,定义各个关节为转动副。本设计选用三关节结构,为了方便设计和运动仿真,3个关节采用完全相同的传动方式。图2所示为所设计的复合驱动指关节结构图,电机和形状记忆合金复合驱动驱动指关节进行运动。本设计选用三关节结构,指关节的结构大小参考人手指关节的尺寸,并且根据实际设计的要求进行了小幅调整。大数据的来源为某中学青少年学生手指尺寸的统计, 统计结果见表1。

1.指关节Ⅲ; 2.电机; 3.连杆;4.指关节Ⅱ; 5.固定块Ⅰ; 6.固定块Ⅰ; 7.指关节Ⅰ;8.皮带Ⅱ; 9.形状记忆合金驱动器;10.皮带轮Ⅳ; 11.皮带轮Ⅲ; 12.固定杆;13.皮带轮Ⅱ;14.皮带Ⅰ; 15.皮带轮I
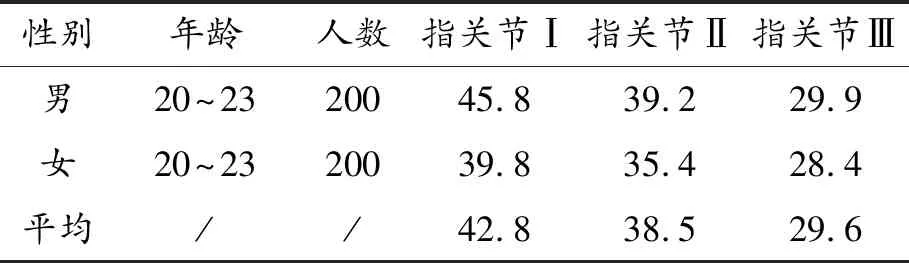
图2 复合驱动指关节结构
在本文设计的复合驱动器中,SMA驱动器主要是为了提高手指的抓取反应速度。在常规抓取中,指关节由电机驱动;在反射抓取过程中,为了提高指关节的抓取反应速度防止被抓物体滑落,指关节由SMA驱动。具体工作原理为:在常规抓取中,电机转动,通过皮带传动带动连杆转动,连杆带动皮带轮转动,以实现指关节的弯曲运动;在反射抓取过程中, SMA丝通电加热收缩产生驱动力矩,拉动连接块移动,由于连接块与连杆是螺纹连接,故连杆转动,同样连杆转动带动皮带轮转动,指关节发生弯曲运动,从而实现复合驱动的目的。
2 运动仿真
将指关节Ⅲ及指关节Ⅲ上的电机、张紧装置、固定杆和形状记忆合金作为第1个连杆,并选择固定连杆;指关节Ⅲ上的第1个皮带轮作为第2个连杆;指关节Ⅲ上的第1个皮带轮定义为第1个旋转副;以此类推定义8个连杆与7个运动副。仿真结果见图3、4。
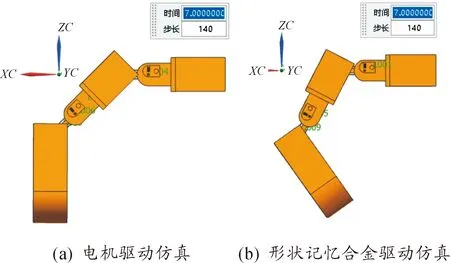
图3 仿真演示截图

图4 指关节II位移/速度/加速度曲线
通过对比位移、速度、加速度曲线可见,指关节Ⅱ电机驱动的位移约为80°,最大速度可达到8.6 (°)/s,最大加速度可达到3.4 (°)/s2。SMA驱动的位移为约为76°,最大速度可达到12 (°)/s,最大加速度可达到4.7 (°)/s2。综上所述,SMA驱动的加载速度明显优于电机驱动。
3 轨迹规划
轨迹规划是提高机器人智能和自主能力的关键技术,研究可行、实用、实时的轨迹规划方法对于实现机器人智能与自主是至关重要的。本文此处采用Matlab软件中运算方法进行轨迹规划。依据实际尺寸,在Matlab里建立三维模型,见图5。
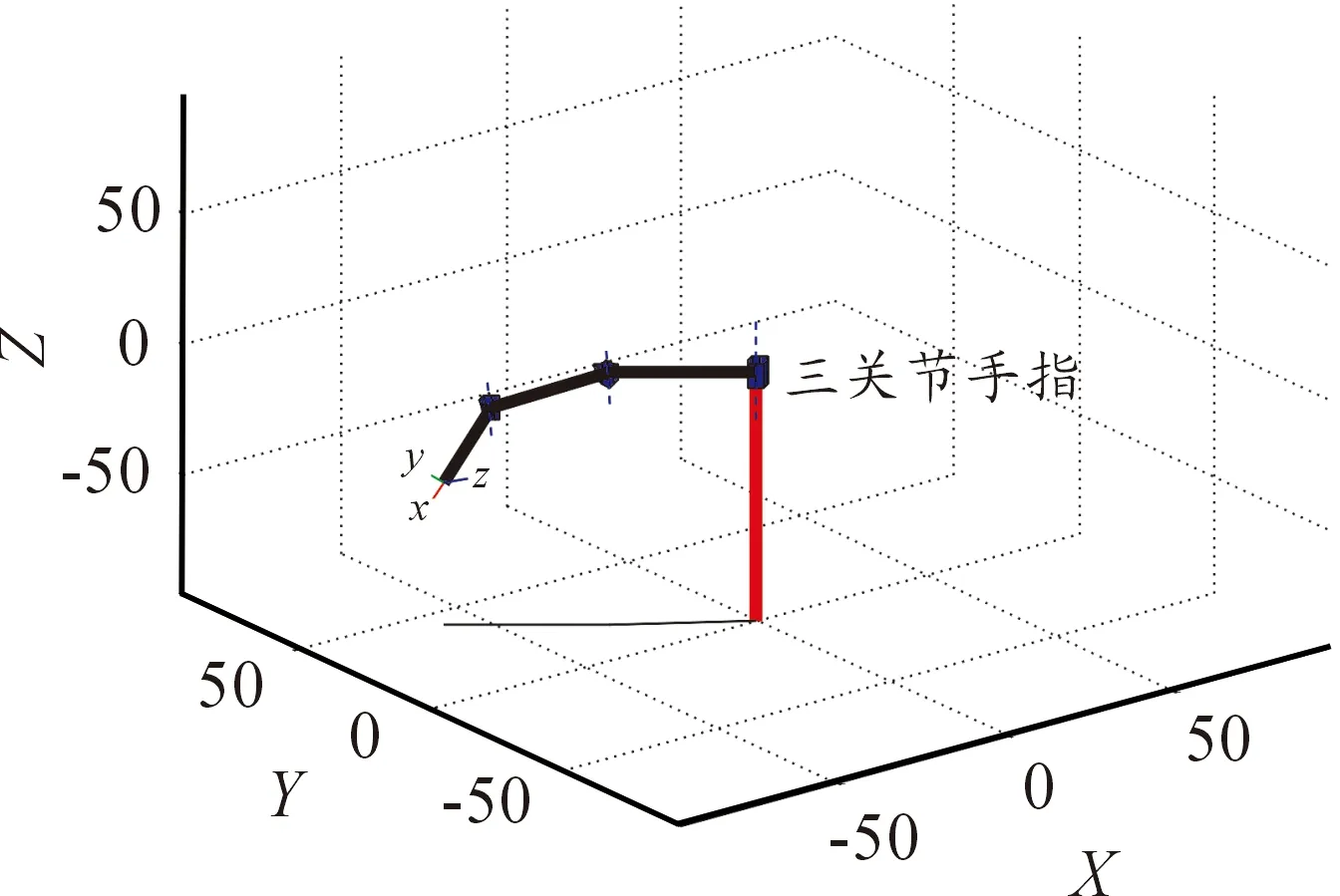
图5 指关节三维模型
起始角度、终止角度分别为:
q0=[8,25,45]*pi/180
q1=[120,120,100]*pi/180
依据轨迹规划的要求,求解各关节的角速度和角加速度,仿真结果如图6所示。
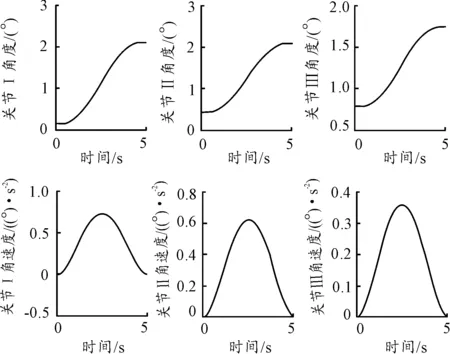
图6 轨迹规划结果
4 结论
针对现有的单一电机驱动指关节加载速度慢、反射抓握性能有限的问题,提出并设计了一种形状记忆合金与电机复合驱动指关节,形状记忆合金的加入主要用于提高手指的反射抓握速度。根据复合驱动系统设计原则、互补原则、兼容原则,提出并设计了形状记忆合金与电机复合驱动指关节,建立了复合驱动指关节的三维模型,并对其进行运动仿真和仿真验证。运动仿真结果表明,所设计的复合驱动关节满足要求,为复合驱动的研究提供了一定的参考。
