基于模型的涡喷发动机耗油量计算
2019-09-10钱伟
钱伟



本文介绍了无人机发动机推力数学模型和耗油率数学模型,通过在无人机的全数字仿真软件中对发动机模型进行实时解算,得到实时推力数据,在对耗油率进行解算,得到实时的油耗数据。通过对各个时刻油耗数据的积分,最终可以实现无人机全数字仿真系统中飞完全程消耗的油量。文中对所采用的三维插值算法进行了原理分析,通过原理分析可以进行插值算法编程实现。文中对无人机全数字仿真软件进行了介绍,给出了仿真界面,并通过模拟航路进行航程仿真,最终计算得出无人机剩余燃油量,证明无人机发动机耗油量计算方法真实可行。
无人机在研制阶段,对发动机的性能摸底并不十分清楚。无人机的飞行过程是高动态的过程,发动机工作状态也不一样,耗油量也不一样。因此设计好初步航路以后,需要对耗油量进行仿真和计算,初步判断设计的载油量能否满足航程的需要,只有当无人机最终仍留有余量,方可保证飞行的安全。耗油量计算的关键为建立发动机的推力一高度一速度一耗油率模型,根据厂家提供的数据,可建立参考的数学模型,并在后续的试验中进行修正。
本文研究小型涡轮喷气式发动机,通过三维线性插值方法,建立发动机的数学模型,将数学模型输入到无人机的全数字仿真模型,对无人机仿真模型建立导航回路,并设计每个航段对无人机速度的需求和油门开度的变化。由于无人机飞行过程中推力时刻都会发生变化,因此在仿真过程中对无人机实时耗油率数据进行积分,可以近似得出飞完全部航路所消耗的油量,进而得出剩余油量,和分析出无人机能否完成航路飞行任务。
发动机耗油数学模型
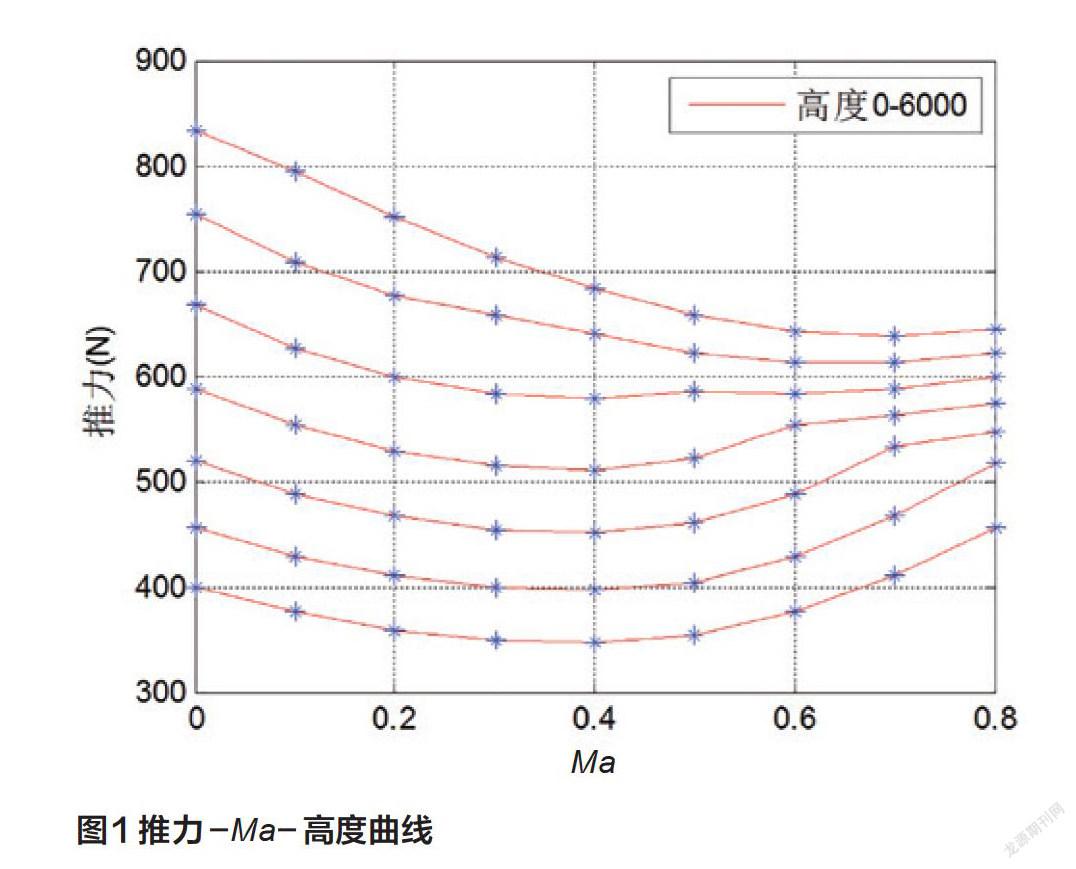
发动机推力模型,给出发动机工作在大车状态时的推力数据曲线和耗油率曲线。由于发动机还有大巡航、小巡航、慢车等工作状态,也有无极变速模式,因此需要对发动机的推力曲线和耗油率曲线进行三维插值算法以计算出在不同的高度、马赫数、油门状态下的准确数值,方便后续在全模型仿真中可以得到准确的耗油量数据。如图1和图2给出所属发动机的推力曲线和耗油率曲线。根据曲线进行插值算法,可得到连续状态下的发动机推力和耗油量。插值算法
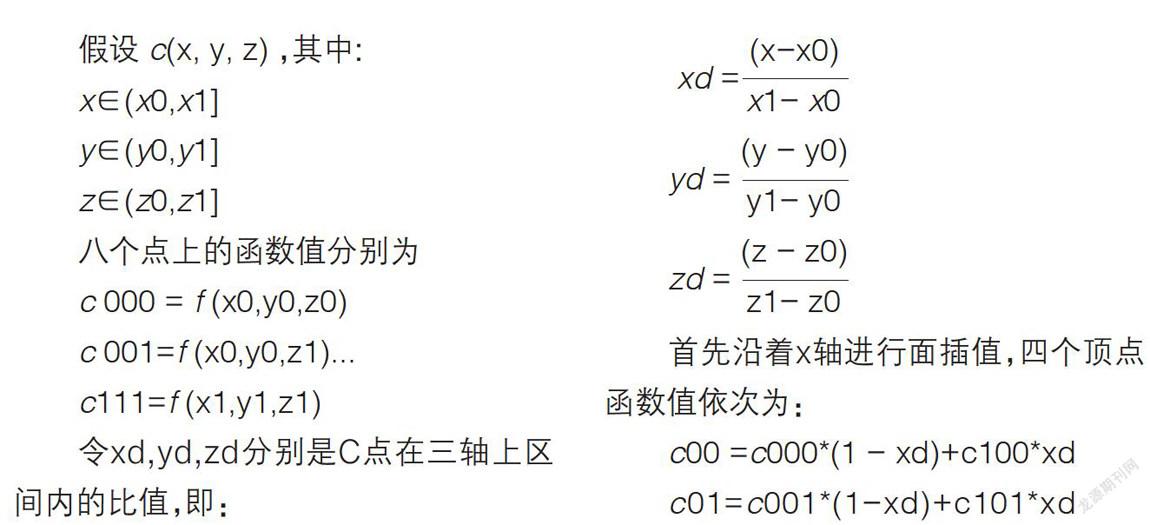
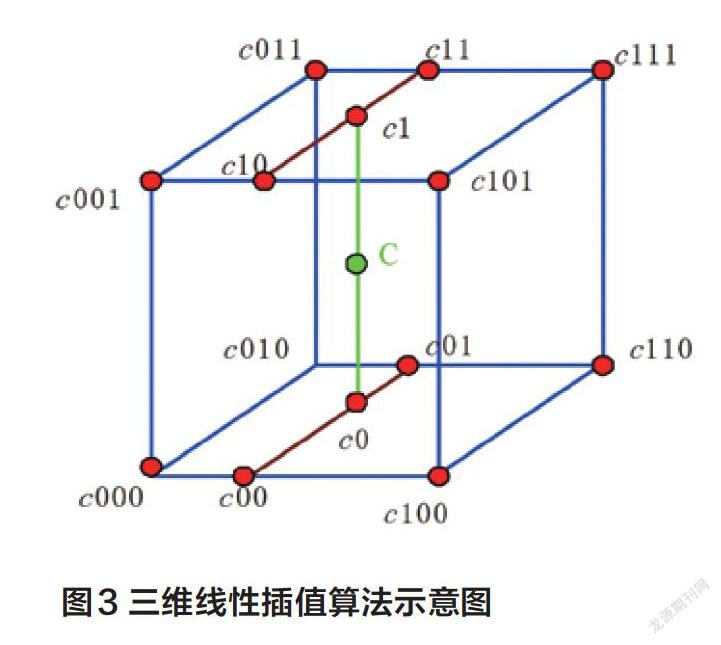
给定数据均为离散点,需要得出所有状态的数据,需要用到插值算法。常用的插值算法比较多,如拉格朗日1次插值、2次插值、n次插值或者牛顿插值,埃尔米特插值等,算法比较复杂,精度也比较高。但是此处,由于不需要特别高的精确度,同时为了减小算法复杂度,采用实现起来较为简单的三维线性插值算法。认为采样点被包含在插值范围内部,即总有一个空间块包含着采样点,最恶劣的情况就是采样点位于边界上。采样点位于插值区间内的情况如图3所示。
假设发动机推力是无人机当前高度、Ma数和转速的函数,对仿真当前的高度、Ma数和转速进行插值,即可得到无人机发动机当前的推力值。
将得到的推力值再对耗油率曲线进行插值,即可最终得到当前时刻的耗油率的值。
无人机仿真软件实现
由于无人机不是独立存在的,它的工作狀态时时受到飞机工作状态的影响,例如飞机需要爬升,则发动机需要大油门,以提供大推力,保证飞机势能上升的同时,动能,也就是速度不会大幅度的下降。
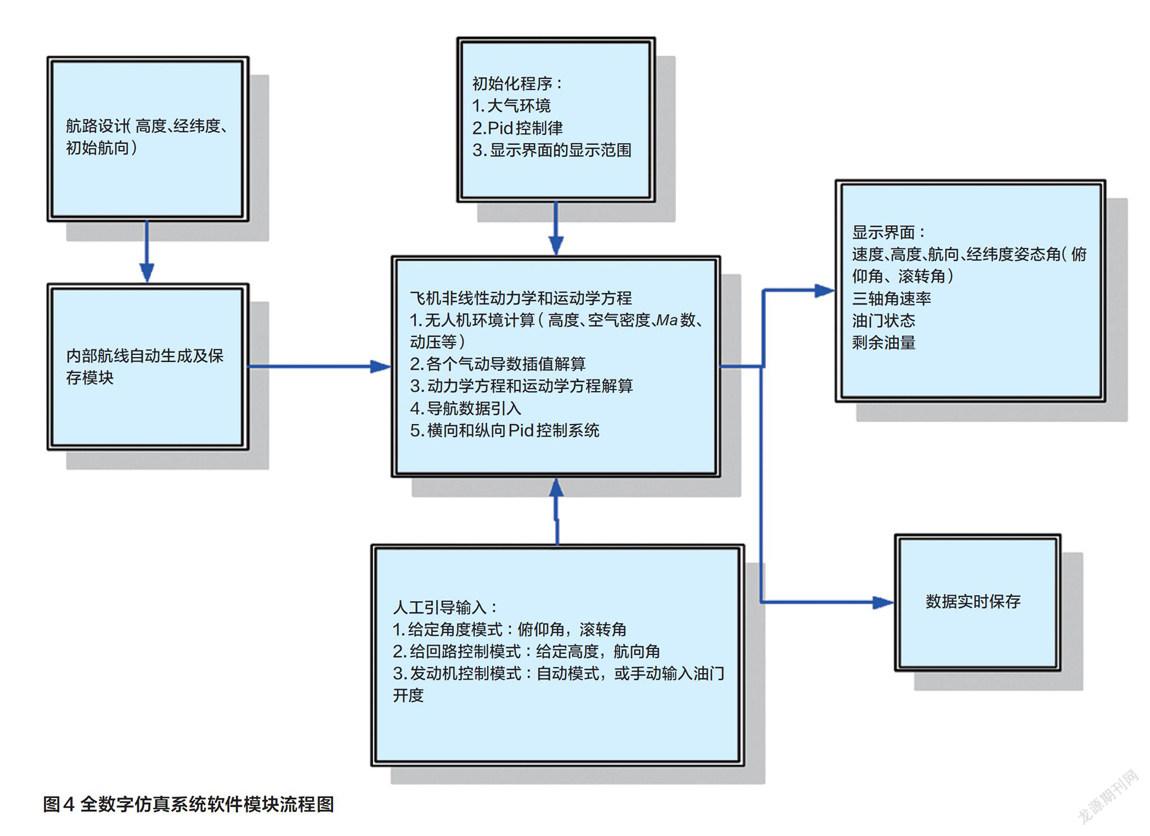
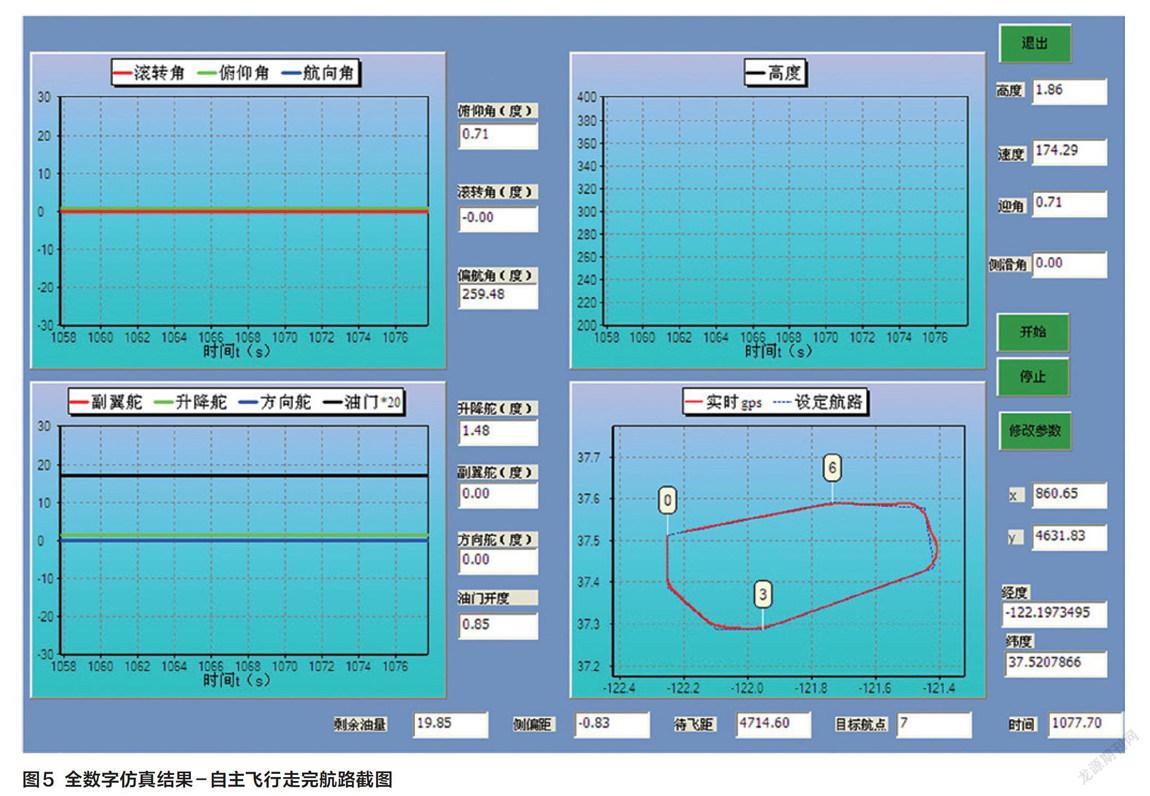
通过vc++2010对无人机系统进行仿真和人机交互,采用定时器不停的采样无人机的工作状态,无人机动力学和运动学模型,采用美式坐标系,采用龙格库塔四阶算法进行12阶非线性微分方程解算,采用离散系统pid控制算法对无人机仿真航路进行管理和仿真,采用CtrIChart进行仿真界面曲线的绘制。全数字仿真系统软件模块流程图见图4。仿真起飞开始的30s采用程序控制爬高,30s后自动切入自主飞行模式。后续可以继续采用全程自主模式或人工引导模式,飞行过程中这两种模式可以相互切换,仿真界面见图5。
通过设置飞机在爬升、平飞、下滑等状态下的发动机油门状态,飞机将有不同的耗油率,此耗油率通过上面介绍的三维插值算法对高度、油门大小、飞机飞行Ma数等插值得到。
发动机耗油量的计算
利用三维插值算法,可以在计算机仿真中得到实时的基于高度、Ma数、油门大小的推力值和耗油率值。根据插值算法,在vc++2010软件中可以编制插值函数,将无人机的高度、Ma数、油门百分比作为变量指针传给插值函数,函数实时输出当前的发动机推力值和耗油率值。根据实时耗油率值进行积分,便可得到当前消耗掉的燃油量。最后,还要把耗油量计算嵌入到无人机全数字仿真软件中,才会实时显示出无人机飞行中当前剩余的燃油量。
仿真结果
为了验证所采用的方法是否可行,在无人机全数字仿真中加入了发动机耗油量计算的部分,设置了典型航路进行仿真。按照航路设计内容,无人机在起飞爬升段采用最大推力,在高度大于300m以后进入自主飞行段,自主飞行段的发动机油门控制为自动控制,其中平飞段油门为60%,爬升段油门为87%,下滑段油门为44%,转弯段油门设计为87%。对油量的要求为飞完全部航程无人机剩余油量不小于总油量的10%,以便应对飞行中可能出现的特殊状况。
航路中共设置了5个转弯段,一个爬升段,一个下滑段,为保证燃油经济性,其余航路均为平飞段航路,在接近航路终点3公里处将发动机停车,无人机滑行前进,同时减速飞行,到回收点上空时开伞回收。
仿真结果如图5所示。
通过仿真可以看出,仿真软件计算出实时耗油率,并将剩余油量显示在界面上,通过仿真,就可以初步判断航路设计的可行性,避免航程过大导致燃油烧干的结果,做到心中有数。
如图5所示,航路全程180km,载油量80kg,从航点1至航点2,无人机爬升至高度3000m,过了航点6以后,无人机逐渐下滑至高度300m,在接近回收点3km处进入回收流程。通过仿真,截止回收点时刻,无人机飞完当前设计的航路后剩余油量为20kg,符合剩余油量大于10%的要求,认为航路可以实现。
结论
无人机的航程是非常重要的一个总体系统参数,与其密切相关的就是系统的载油量。根据载油量可以初步确定航程,根据待飞航程,也可以反过来提出载油量的需求。对已经规划好的航路,进行理论的航线飞行,对载油量是否充足进行验证,是一个比较可行的方案。本文针对无人机设计阶段对发动机性能摸底不透的现状,结合所做的无人机全数字仿真平台,对发动机各项技术参数进行三维线性插值计算,得到数字仿真中实时的耗油量,并对其进行积分运算,最终解算得到无人机飞完设计的航路能够剩余的燃油量。结果可以做为外场试验对航路的前期理论验证,可以有效避免无人机飞行中将燃油耗尽而坠入海中的风险,提高飞行安全性。
目前的无人机全数字仿真中,采用的插值算法精度较低,后续为了提高仿真精度,还可以将三维线性插值算法更换为拉格朗日n次插值方法。
(参考文献:略。如有需要,请联系编辑部。)
