“小鹰”一500通用飞机改无人机系统总体方案设计
2019-09-10张健尤伍
张健 尤伍



采用成熟的通用飞机改无人机可以达到降低技术风险、节约研制经费、缩短研制周期的目的。本文以“小鹰”-500通用飞机改无人机系统为例,详细地给出了该无人机系统的总体技术方案,包括无人机系统组成和功能、机体结構加改装主要内容、以飞行控制与管理系统为代表的各分系统、数据链和地面站等设计方案。最后结合该项目工程实践经验,对比分析了通用飞机改无人机系统的优缺点,指出利用现有的通用飞机改无人机系统虽具有“短、平、快”的优点,但结合用户需求“量身定制”的无人机系统更符合未来发展方向。
通用航空飞机是指用于除军事、警用、海关缉私和公共航空运输飞行以外的航空活动,包括从事工业、农业、林业、渔业、矿业、建筑业的作业飞行和医疗卫生、抢险救灾、气象探测、海洋监测、科学实验、遥感测绘、教育训练、文化体育、旅游观光等方面飞行活动的飞机。随着国民经济的快速发展,通用航空面临前所未有的发展机遇:传统的飞行培训、农林作业等业务呈现稳步增长态势,同时公益类、交通类和消费类新兴市场逐步形成,权威机构预测,未来10年我国通用航空飞机需求量约10000架,其中活塞动力飞机6000架、涡桨动力飞机2000架、喷气公务机500架、直升机1000架,预计市场规模约1500亿元。
近年来,随着无人机相关技术的发展,无人机的发展呈现“井喷”现象。用成熟的通用航空飞机改无人机,具有技术风险小、研制费用低、研制周期短等特点,近年来国内很多企事业单位正在从事这方面的工作:典型的如AT200无人机、航空工业贵航的“鹞鹰”改无人机、第一飞机设计研究院的”小鹰”-500改无人机、航天集团的运-5B改无人机等,本文结合”小鹰”-500改无人机系统研制,完成系统总体方案设计,并总结出通用航空飞机改无人机系统的主要特点。
“小鹰”-500通用飞机简介
“小鹰”-500通用飞机由航空工业第一飞机设计研究院研制,石家庄飞机工业公司制造生产。”小鹰”-500飞机研制过程中严格按照CCAR-23-R2的要求,完成了设计、制造、试验、试飞和适航取证,中国民航适航部门对其进行了全过程的适航审查和生产监控。该机2003年10月首飞,相继完成了50多项科目试飞,包括空中停车、颤振、失速和尾旋等多项I类风险科目,2005年10月获得中国民航总局颁发的型号合格证。图1所示为滑跑中的”小鹰”-500飞机。该机拥有完全自主的知识产权,其综合性能达到并接近国外同类机型先进水平,填补了国内通用航空在4-5座轻型多用途飞机上的空白。
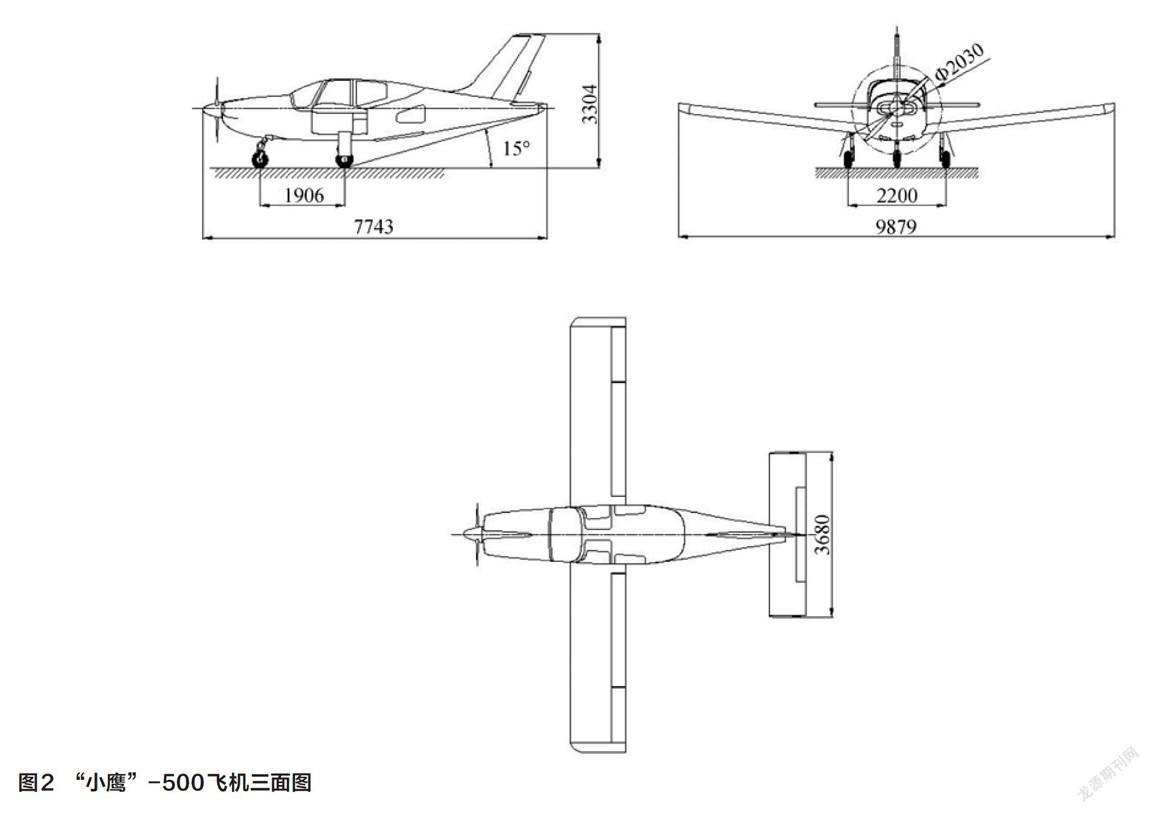
“小鹰”-500通用飞机采用大展弦比常规布局形式,悬臂式等弦长下单翼,后退式简单襟翼,外翼带有副翼。全动平尾,后掠的垂直尾翼带有方向舵。单台活塞式发动机/双叶螺桨驱动。前三点式可收放起落架。后机身下部两侧各有一腹鳍。”小鹰”-500飞机按单驾驶体制设计,基本型为4座,并排前后座,后排可改为3座使其成为5座型。图2是”小鹰”-500飞机的三面图。
“小鹰”-500飞机的主要技术数据如下:
机长
7.742 m
机高
3.044 m
翼展
9.879 m
主轮距
2.200 m
前主轮距
1.906 m
螺旋桨直径
2.030 m
“小鹰”-500飞机不仅是教练机和私人飞机的理想选择,该机经改装后还可用于航空旅游、航空探测、航空摄影、农林渔牧、环境保护、反恐安防等不同领域的作业飞行。
“小鹰”-500飞机改无人机系统的主要技术指标
根据前期市场调研和论证结果,要求改装后的无人机系统能够在视距范围内实现安全飞行,同时为后续任务系统加改装发展预留空间。系统采用车载式地面控制站,先期应具备任务监控、飞行监控、链路监控等基本功能,后期增加任务载荷控制功能。
无人机系统的主要技术指标如下:
最大起飞重量
1400kg
最大着陆重量
1400kg
任务载重
300kg
巡航速度
180 - 240 km/h
实用升限
4000 m
航程
500 km
航时
8h
起飞滑跑距离
≤400m
着陆滑跑距离
≤400m
机动过载
一1.09 - +3.8g
机体寿命
10000飞行小时
/20000次起落/20日历年
起降阶段抗侧风能力
13m/s
数据链路采用主链路(C波段)与备份链路(UHF波段龃合的方式:
C波段数据链工作频段:上行4.4GHz-4.6GHz,下行4.9GHz - 5.1GHz:
UHF波段数据链工作频段:上行610 - 660MHz,下行500 - 550MHz;
上行传输时延≯100ms,下行传输时延≯200ms;
数据链作用距离:不小于200Km;
采用车载式地面控制站:
控制站应具备飞行监控、航路规划、链路监控和任务载荷控制等功能;
地面控制站展开和撤收时间≤45min。
总体技术方案设计
指导思想
“小鹰”-500通用飞机改无人机研制工作中遵循以下三个原则:一是保持飞机的气动外形、动力装置和主要结构基本不变,以充分继承原机良好的气动特性和飞行品质;二是机载设备尽量选择货架产品,以降低研制改装成本和缩短研制周期;三是无人机平的研发时预留任务系统接口和空间,为后期加装各种类型的任务系统创造条件。
系统组成
“小鹰”-500通用飞机改无人机系统,主要由无人机、数据链路、地面控制站和任务载荷(预留)等组成,系统组成如下图3所示:
结构加改装设计
“小鹰”-500通用飞机改无人机结构加改装设计过程中保持原机外形、机体主结构、起落架结构基本不变。拆除原机中机身上部的两个蝶形门和中机身上部相关结构,在保持外形不变的条件下代之以可拆卸的复合材料整流罩。拆除原驾驶舱和客舱内的座椅和相关结构;拆除原机的大部分航电设备,代之以数字化航电设备。同时对内部结构和设备进行适应性改装。
无人机机体平台主要由机身、机翼、垂尾、平尾、起落架等机体部件组成。从机身中部断开原平尾操纵系统,拆除前半部分操纵机构,保留后段操纵部件,在机身中部增加电作动器。从机身中部断开原方向舵操纵系统,拆除前半部分操纵机构,保留后段操纵部件,增加方向舵电作动器。从机身中部断开原副翼操纵系统,拆除前半部分操纵机构,保留后段操纵部件,同进增加副翼电作动器。原机襟翼操纵系统是集中式电动驱动系统,改装时只需要对电机的控制线路及逻辑进行更改即可。
起落架沿用原机的前三点式起落架,由前起落架和主起落架组成。前轮设有转弯机构,飞机在地面可以灵活转弯。前轮转弯操纵通过直流体制电动舵机实现,前轮向左右两侧偏转的最大角度不得大于18.5°。用直流电动舵机直接驱动原转弯操纵机构,进行前轮转弯。主起落架安装有刹车裝置,可有效缩短无人机着陆滑跑距离并通过左右刹车实现滑跑纠偏。起落架设有位置传感器、告警装置和应急放下机构,若起落架不能正常放下将发出警告,此时应急放下机构可根据地面操作指令将起落架应急放下。”小鹰”-500飞机通用飞机改装无人机起落架收放控制系统方案基于原”小鹰”一500飞机起落架控制系统方案,仅将原来机械操纵部分改为电动控制,起落架收放系统具有起落架收放和位置指示及告警功能。”小鹰”500通用飞机改装无人机主轮刹车系统采用电控刹车系统。无人机机轮刹车系统主要用于接收并识别飞控计算机的刹车指令,根据飞控计算机指令,实现飞机的静刹车、正常刹车、应急刹车、松刹车、差动刹车、停机刹车、BIT自检测。向飞控计算机反馈当前刹车压力值、系统附件工作状态。电刹车系统由控制盒、电源模块、电控刹车阀和信号转换器等组成。
动力装置
动力装置保持不变,仍采用原机的六缸水平对置气冷式活塞发动机,螺旋桨为全金属、恒速、变距、不可顺桨的两叶螺旋桨。在”小鹰”-500飞机改装无人机系统研制过程中,发动机控制系统主要根据原发动机的可控参数来选择相应的测量传感部件和执行机构,并采用与控制计算机以及原机发动机控制电路相组合的方式来实现发动机状态的控制。为此增加一套发动机操纵作动系统(包括油门、油气混合比和螺旋桨总距作动),通过作动系统一飞控计算机一地面控制站三者之间的通讯来驱动推拉钢索的运动,进而实现发动机操纵系统的控制。发动机转速、滑油压力、滑油低压警告、滑油温度、气缸头温度和排气温度、进气压力和燃油流量、发动机计时等发动机工作参数和告警信息等发送至地面控制站,以便对发动机工作状态进行实时监控。
LE-500飞机发动机起动和点火系统主要由电动增压油泵、电动起动机、左右磁电机、点火电咀、磁电机/起动开关等组成,起动过程可由安装在飞机上的磁电机/起动开关控制。
飞行控制与管理系统
“小鹰”-500飞机改无人机飞行控制与管理系统全新研制,是”小鹰”500无人机的核心系统。”小鹰”-500改无人机的飞行控制与管理系统由飞行控制与管理计算机、传感器和作动器等组成,系统结构如图3。飞行控制与管理系统的主要任务包括:通过数据链系统完成与地面站的信息收发和处理、根据指令对飞机的飞行与起降进行控制、对飞机上各个重要系统进行监控并将信息进行上报以及对故障进行识别与处理等。
飞行控制和管理系统主要实现飞行控制和飞行管理功能。飞行控制功能是根据控制指令解算全动平尾、方向舵、副翼和发动机油门杆的偏度,实现自动起飞、自动导航、自动降落、襟翼控制、起落架控制、自动油门以及应急处置等功能。飞行控制功能覆盖无人机地面滑行、起飞、爬升、出航、返航、下滑、着陆的整个任务剖面。飞行管理系统主要实现导航管理、发动机管理、余度管理、机载设备管理、BIT管理和应急管理等功能。
无人机的全动平尾、副翼和方向舵的操纵均改为计算机控制的作动器进行操纵。计算机同时对原电动襟翼收放机构、起落架系统进行控制,并为自动油门系统提供指令。起落架收放、刹车以及前轮转向由计算机进行控制,其中前轮转弯系统将保留原转向摇臂,与电动舵机连接,实现转向控制与减摆功能。飞行控制与管理系统接收动力、起落架、机电、任务等系统的数据,并与控制系统的数据综合后,通过数据链发至地面站及飞行参数记录仪,也可以在地面与仿真系统进行交联开展系统综合联试。
航电系统
原机的仪表系统中除保留全、静压受感器外,其他仪表设备和通讯系统的电台和音频系统设备拆除。加装的航电设备包括无线电高度表、高精度光纤惯导、大气数据机、航管应答机、飞行参数采集记录器、数字视频摄像系统和差分定位系统组成,其中差分定位系统又包括差分GPS接收机和900M数传电台。
机电系统
燃油系统保持原机油箱不变,通气分系统和加放油分系统保持不变。供油系统中用操作舵机代替燃油选择器旋钮,取消电动燃油泵按钮,通过地面控制与燃油选择器进行交联的方式对其进行操作。增设燃油测量转换盒,将油量传感器信号转换为总线信号并发送至飞控计算机,然后通过数据链路将数据实时发送至地面控制站。
环控系统已有的进气口能够满足电子设备通风需求。因此,环控系统在”小鹰”-500飞机环控系统基础上做适应性更改。
供电系统为飞机的直流用电设备提供28V的直流电,在发动机或发电系统不工作时为机上应急用电设备提供24V应急直流电源,在地面为飞机提供地面维护电源和发动机起动电源。供电系统包括电源系统和配电系统两大部分,其中电源系统由主电源系统、应急电源系统、外部电源系统组成。由于新增设备的用电消耗,原机的供电量不能够满足全机系统设备的用电量,因此新增一套直流发电系统。
照明系统保持外部照明不变,取消原机的座舱照明系统。
拆除正副驾驶位置驾驶员座椅、安全带、后排座椅、坐垫、靠垫及乘客安全带,同时对舱内装饰板做适应性拆除。
数据链路
测控与信息传输系统主要包括地面测控设备和机载测控设备两大部分。机载测控设备主要包括天线、机载功放、机载收发组合等设备,地面测控设备包括地面数据终端和链路监控设备等。
视距数据链采用C波段和UHF波段双余度全双工数据通信;实现将地面站的飞行控制指令、任务控制指令、链路控制指令等遥控指令发送至机载系统;同时将无人机平台的飞行参数、任务信息、系统工作状态以及链路工作状态等遥测数据发送至地面站。
数据链机载终端包括8个LRU:C波段机载收发单元、C波段机载变频单元、C波段机载功放单元、C波段机载全向天线、UHF波段机载收发单元、UHF波段机载变频单元、UHF波段机载功放单元和UHF波段机载全向天线。
地面控制站
地面站采用车载方舱式地面站,地面站组成包括:飞行监控单元、任务监控单元、链路监控单元、综合数据处理单元、数据记录单元。地面站对无人机的遥测遥控采用3人操作体制,提供飞行操作、任务操作和链路监控席位各1个。
飞行监控单元主要负责为操作人员显示遥测数据中的飞行信息,提供便捷的飞行监控操作界面,并将飞行控制指令发送到综合数据处理单元,同时能够向操作人员提供无人机前视摄像画面。
任务监控单元主要负责为操作人员显示遥测数据中的任务信息,提供便捷的任务监控操作界面,并将任务载荷控制指令发送到综合数据处理单元,同时能够向操作人员提供无人机任务载荷的图像信息。
链路管理单元的主要功能包括:接收视距链路地面设备状态信息;接收飞行器坐标信息并依据本站坐标解算出方位角、俯仰角天线引导数据;对链路的机载和地面设备状态进行解码显示;提供良好的人机操控界面。
综合数据处理单元是地面控制站的核心部件,负责调度和控制地面站各单元的协调运行,它从数据链路系统各地面终端接收图像和遥测数据,经分析、融合、处理,将产生有效和最优的遥测和图像数据,分发给飞行监控单元、任务监控单元、链路管理单元;并分别从飞行监控单元、任务监控单元、链路管理单元接收各自的控制指令,经综合处理后产生统一格式化的遥控指令,分别发送给UHF和C波段两个地面数据终端。
数据记录单元用于全程记录无人机操作过程的遥测遥控数据,主要包括飞行监控指令和状态、任务监控指令和状态、链路监控指令和状态,以及通过视距链路回传的前视摄像视频或任务载荷图像。飞行任务结束后,根据需要可对记录的数据进行回放。
通用飞机改无人机的优缺点对比分析
通用飞机改无人机的优点
改无人机选用的通用飞机,通常都是批量生产交付的飞机,飞机研制过程中经历过严格的适航取证,飞机机体的可靠性、寿命、飞行安全性有保证。
改无人机过程中保持原机的气动外形基本不变,无人机就会继承原通用飞机成熟的气特性和飞行品质。同时研制过程中可以避免大量的设计计算和风洞试验,不仅可以降低技术风险,同时也会降低研制技术风险并节约研制经费。
有人机改型研制的无人机,通常保留原机主体结构,这样研制过程中也不需要开展大量的强度试验,同时机体结构的寿命基本和原机相同。由于通用飞机都经历了严格的适航取证过程,能够保证这些优良的品质也会继承下来。
一般情況下改无人机时动力装置和燃油系统基本上不变,无人机的飞行包线和基本性能也保持不变。改装后的无人机在原机的飞行包线范围内可以实现安全飞行。
由于通用飞机已经批量生产,在此基础上改装研制无人机,制造过程中可以使用原有的生产线、工装和工艺,有利于降低和生产和制造成本。
通用飞机改无人机的缺点
尽管通用飞机改无人机有很多的优点,但是其缺点也是显而易见的。
首先,有人驾驶飞机机身外形通常都是以人为中心进行设计的,改装成无人机时,由于机身的剖面形状一般不变化,这应造成机身的横截面积大于实际需求,飞机的阻力增大,经济性降低。
改进研制的无人机起飞和着陆重量会受原机的限制,同时飞机的重量和重心也要进行严格的控制。改装无人机时重量、重心的初步设计,主要依据原有人机的重量分布关系,进行重新布局、分配与设计,进而为系统设备的体积、重量提出严格的控制要求。
通用型飞机改无人机时,飞机的主结构基本不变,由于机身内部装载发生变化,飞机结构的效率难以充分发挥。尽管在改装过程中要拆装座椅和大量不需要的设备等,但是机身内的空间往往受原结构的限制,并不利于装载无人机的设备和任务载荷。
通用型飞机通常都采用常规的机械操纵系统,在改无人机的过程中,飞行控制系统升级为电传飞控系统,但受原机各种条件的限制,舵机很难装在舵面附近,通常采用在驾驶舱或机身中部断开原有的操纵系统,拆除前部的驾驶盘和脚登,代之以舵机驱动,也就是飞控系统一般会保留原机机械操纵系统的后半部分,会在一定程度上限制飞控系统性能的发挥。
通用飞机改无人机最终会面向用户,任务载荷的加装是必然。但在加装任务系统过程中,会受到原机各种条件的制约,为了达到理想的效果,往往还需要对机体特定部位进行较大范围的改进,与针对用户使用需求专门开发研制的无人机系统相比,复杂程度提高,工作量增大。
结论
“小鹰”-500通用飞机改无人机系统总体技术方案设计,保持了原机的气动外形、主体结构和动力装置基本不变,通过全新研制飞行控制与管理系统,同时对相关结构和系统进行适应性改装,改装后机内可用空间达4m3以上,最大载重达500kg,可搭载多种任务载荷,具备迅速发展成为一型中型无人机系统产品的潜力。
(参考文献:略。如有需要,请联系编辑部。)
