基于IVSSTLMS算法的数字域共址无线收发设备互扰对消
2019-09-06郝学坤刘建成
郝学坤,刘建成,2
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081 2.中国人民解放军31634部队,云南 昆明 611731)
0 引言
21世纪是信息时代,人们对信息需求量越来越大,可用的无线频谱资源日益紧张。无线通信因其本身的机动性和灵活性已成为主要通信方式,比如超短波无线电台、微波中继和卫星通信。然而,随着无线通信设备数量急剧增加,在有限的物理空间和频谱范围内,大量无线收发设备同时工作将不可避免地产生相互干扰,比如陆基战术指挥车和海上大型舰船上的众多型号和频段的电台、雷达等,构成了复杂的电磁环境。
为抑制共址无线收发设备间互扰,研究者们提出利用已知的发送信号构建干扰,再将其从接收信号中减去的干扰对消方法,能够有效解决微波同频中继收发互扰[1-3],战术超短波同车电台互扰[4-7],同时同频全双工(Co-time and Co-frequency Full-duplex, CCFD)收发自干扰[8-16]和卫星中继收发[17]等问题。该方法不需要牺牲任何频谱资源,仅需在接收天线与预选滤波中间加入对消装置,对收发设备的结构特性无特殊要求。根据干扰对消所处理信号的形式,可将其分为射频域干扰对消和数字域干扰对消。
数字干扰对消通常是在射频干扰对消之后进行,利用已知的基带信号,在数字域通过信道估计和自适应滤波等方法有效估计干扰信号,进而消除基带接收信号中的射频对消残余干扰,提高系统的对消比。比如文献[9]和[14]将射频干扰对消和数字干扰对消结合,较好地解决了CCFD系统的自干扰抑制问题。
文献[14]基于最小二乘(Least Square, LS)估计,利用等间隔的时域导引序列估计信道响应,再将已知的基带信号与信道响应卷积,得到重构的干扰信号。为在射频域高对消比基础上,进一步提高数字域干扰对消性能,文献[9]利用WiFi中OFDM信号每帧的导引序列估计出自干扰信号参数,不过该方法受限于帧结构的导引序列设置,且采用的LS估计性能有限。文献[16]基于文献[14]和文献[9]的数字干扰对消架构,提出最大似然信道估计的干扰对消方法,当期望信号与干扰功率之比(Signal-to-Interference Ratio, SIR)为-55 dB时,与文献[14]和文献[9]相比性能提高约10 dB,但随着SIR增大至-35 dB,对消比基本相同。文献[12]提出基于最小均方误差的直通和共轭两路信道参数估计方法,进而实现宽带自干扰信号的数字对消,不过该方法同样需要导引信号,且不能实时跟踪信道的变化。文献[15]和文献[18]提出一种新的数字干扰对消方案,该方案在干扰机发射天线之前耦合参考信号,利用接收机的本振对参考信号下变频,将信号转换至基带,再采用信道估计的方法重构干扰信号。该方法性能与文献[14]相比,对消比提高10 dB以上,但需要附加的射频通道,跟踪信道变化的能力弱。文献[19]利用常规定步长LMS算法实现CCFD数字干扰对消,但该方法未解决参考信号自相关矩阵特征值发散的问题,致使收敛速度慢。文献[20]采用递推最小二乘(Recarsive Least Square,RLS)自适应滤波方法实现数字干扰对消,能够获得约26 dB对消比,同时与文献[19]相比提高了收敛速度,但该方法同样不能消除干扰的非线性分量,且计算复杂度高。文献[2]基于LMS算法,提出基于谱成型的自适应数字干扰对消方法,应用于全双工中继通信,但该方法所需计算量大,并未解决LMS算法收敛速度与互扰对消比相互制约的问题。
由上述分析可知,针对共址无线收发设备的数字域互扰对消,基于LS信道估计的方法需求解逆矩阵,计算复杂度高,且不能够实时地跟踪信道变化,而基于LMS和RLS算法的互扰对消方法存在收敛速度与互扰对消比相互制约的矛盾。本文针对此问题,提出基于迭代变步长变换域最小均方算法(Iterative Varging Step-Size Transform Least Mean Square,IVSSTLMS)算法的数字域共址无线收发设备互扰对消方法。
1 数字域互扰对消
现有的数字域干扰对消方法主要是通过信道估计的方法,估计出离散互扰信道响应h(n),再将已知的基带发送信号s(n)与h(n)进行离散卷积,得到重建的基带互扰信号sc(n),进而从接收的基带信号r(n)中减去,最终完成数字域互扰对消。
数字域干扰对消基本原理如图1所示,对于离散信道响应h(n)的估计,文献[14]和文献[16]分别提出最小二乘LS、最大似然(MaximumLikelihood, ML)和频域LS法。

图1 数字域互扰对消原理框图Fig.1 Digital mutual-interference cancellation principle block diagram
暂不考虑残余的非线性干扰抑制,假设互扰信道响应的阶数等于M,接收的基带信号r(n)可表示为:

(1)
式(1)中,d(n)表示远端发给接收设备的期望信号,ε(n)表示噪声。
将信道响应h(n)、r(n)、d(n)和ε(n)以矢量形式表示:hM=[h(0)h(1) …h(M-1)]T,rM(n)=[r(n)r(n-1) …r(n-M+1)]T,dM(n)和εM(n)的形式同rM(n),式(1)可转化为:
rM(n)=SM(n)hM+dM(n)+εM(n)
(2)
式(2)中,SM(n)为基带发送信号s(n)构造的托普利兹(Toeplitz)矩阵,即:
(3)
由式(2)和式(3)可得数字域互扰信号sI(n)与参考信号s(n)、信道响应矢量hM的关系:
(4)
式(4)中,sM(n)=[s(n-M+1)s(n-M+1) …

数字域干扰对消旨在利用已知的发送信号s(n)和接收信号r(n),估计互扰信道响应矢量hM,进而消除r(n)所包含的互扰信号sI(n)。当互扰为带内线性分量,可采用计算简单的LMS自适应算法递推求解信道矢量hM,再引入迭代变步长思想[21],进一步加快收敛速度,减小稳态失调误差。
因基带参考信号s(n)是调制符号经成型滤波输出,其自相关矩阵的特征值发散[22],所以需对LMS算法的参考信号做变换处理,即TLMS算法,使得参考信号具有良好的平稳特性。
2 基于IVSSTLMS算法的数字域互扰对消

(5)
式(5)中,μmin是设定的最小值,μmax是设定的最大值,κ为调整参数,控制了μ(n)随n变换的快慢,m是步长因子改变的起始时刻,初始值为0。
在此基础上,基于IVSSTLMS算法的数字域互扰对消模型如图2所示。
该对消方法的基本流程如下:
1) 算法初始,根据已知信号s(n)及先验知识,确定M′,保证M′不小于互扰信道等效阶数,信道响应向量初值为0,设定修正因子δ,步长因子最大最小值μmax、μmin和参数κ,递推次数的初始值m=0,n由0起始;
2) 由M′和λ计算变化矩阵TM′和对角矩阵ΛM′;
3) 根据1)中参数计算步长因子μ(n),之后执行式(6)、式(7)和式(8);
4) 估计当前时刻误差e(n)的功率大小,与前k时刻e(n-k)比较,二者之差若大于设定门限γ,则执行步骤5),小于则直接返回执行步骤3);
5) 将当前的递推次数n赋值给m,返回执行步骤2)。
其中,γ设为接收信号功率3~5倍,e(n)功率估计等价求k个值平均。
上述对消过程的数学描述如下:
xM′(n)=TM′sM′(n)
(6)
(7)
(8)
式(6)—式(8)中,TM′为算法的M′×M′维变换矩阵,xM′(n)为变换后的参考信号向量,e(n)为对消后信号,ΛM′(n)为M′×M′维对角阵。

(9)
3 性能分析及仿真
为进一步分析提出方法的性能,本节从理论上推导其收敛性和能够获得的MICR,同时对比分析该方法与基于现有变步长LMS、RLS及LS信道估计对消法的计算复杂度,并进行仿真验证。
3.1 收敛特性
IVSSTLMS算法建立在最小均方误差准则基础上,是对维纳解的递推求解。所以,分析基于IVSSTLMS算法的数字域互扰对消性能,可参考LMS算法分析,不同之处在于变化矩阵和对角阵的处理。

e(n)=[cM(n)]HxM(n)+u(n)
(10)
式(10)中,u(n)=d(n)+ε(n),其均方误差为σ2=E{|u(n)|2}。
因互扰与期望信号、噪声不相关,对消误差信号的均方值可表示为:

(11)
同理,利用直接平均法,式(11)等价为:

(12)

(13)
(14)
式(14)中,λi为相关矩阵Rs,M的特征值,ΛR是由特征值构成的对角矩阵。
由式(6)和式(8)可得:
cM(n)=cM(n-1)-μ(n-1)e*(n-1)ΛMTMsM(n-1)
(15)
将式(15)代入式(13):

(16)
由式(10)得e(n-1)表达式,代入式(16):
(17)

(18)


(19)
参考信号服从近高斯分布,则有:

(20)
与文献[21]推导类似,均方误差与递推次数、参考信号和互扰强度之间的关系为:

(21)
其中,Φ(n)和ψ(l)如式(22)和式(23)所示:

(22)
(23)
由式(21)至式(23)可知,该对消方法收敛的条件是,对于任意的n和i均有|1-μ(n)λi/(Ps+δ)|<1,即步长因子最大值μmax和最小值μmin需满足:
(24)
式(24)中,λmax=max(λi|i=1,…,M)为特征值的最大值。可见,步长因子的取值范围由参考信号自相关矩阵特征值及估计的功率值决定。
3.2 MICR分析
参考文献[21]对收敛状态的均方误差推导,令E{|e()|2}表示该方法在n足够大时的均方误差,有:
(25)
由式(25)即可得到基于IVSSTLMS算法的最终互扰对消比MICR,设接收的基带互扰信号强度为PI,则最终的MICR为:
MICR
(26)
可见,当参考信号一定,互扰信道稳定时,基于IVSSTLMS算法的数字域干扰对消方法的最终MICR仅与步长因子最小值相关,与文献[21]所得结论一致,但式(8)引入对角矩阵ΛM解决特征值发散,一定程度上加快了收敛的速度。关于迭代变步长对TLMS算法收敛速度提升的分析可参考文献[21],本文不再详述。
3.3 计算复杂度
除算法收敛速度和稳态MICR外,计算复杂度也是影响应用的重要因素。所以,分析IVSSTLMS算法计算复杂度,并与RLS算法、文献[23]的VSSNLMS算法和基于LS信道估计对消方法进行对比。假设算法递推估计变量的维数为M,步长因子计算的指数运算一般采用查表法,可暂不考虑其运算量。对于LS信道估计对消方法,设参考信号矩阵为M×M维,且设每间隔L个信号数据进行一次估计,则IVSSTLMS算法、RLS算法和LS估计法,输出NL个期望信号数据所需的加、乘和除法次数如表1所示。可见,IVSSTLMS算法计算复杂度略高于文献[23]的方法,但远低于RLS算法和LS估计法。
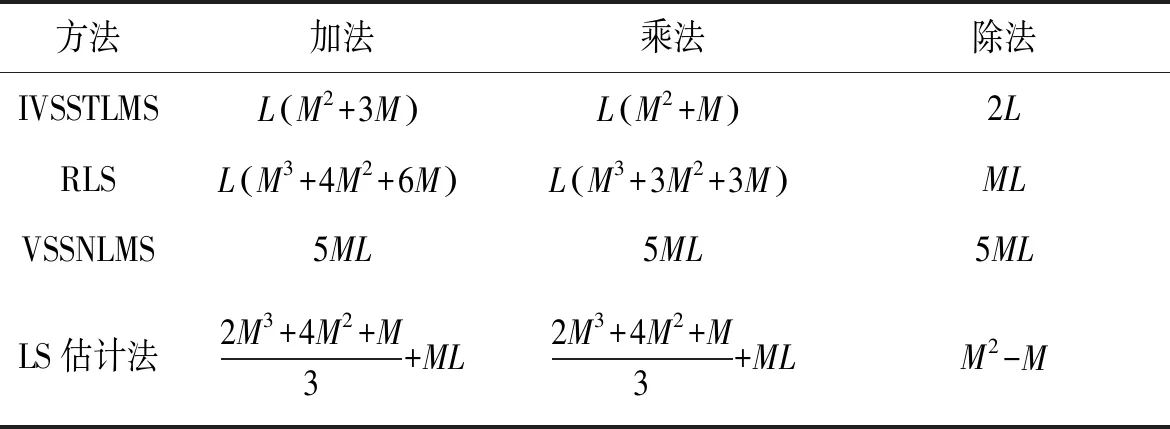
表1 不同方法所需的计算复杂度
3.4 仿真验证
本节将对IVSSTLMS数字域互扰对消方法进行仿真,并同基于文献[23]VSSNLMS算法和RLS算法的对消方法进行对比。数字域干扰对消所处理的为基带信号,因接收设备目的是有效接收期望信号,所以数字域的期望信号为零频,而进入接收设备的数字域基带互扰信号因收发频率的不同,通常具有一定的频偏,如图3所示。仿真以超短波战术电台和军事卫星通信常用的QPSK调制为例,信号带宽为500 kHz,基带信号为8倍采样,即采样率fs=8×500 kHz=4 MHz。收发频率间隔250 kHz,设共址收发设备间的互扰信道为慢衰落多径信道(因收发天线相对位置不变,故不考虑多普勒频移),传播路径数为4,包括1条直射径和3条多径,对应路径延时和损耗分别为:[10 17 28 55]ns,[34 38 42 51]dB。设接收的期望信号功率为-85 dBm,带内噪声强度为-105 dBm,发送设备辐射功率为37 dBm,射频域干扰对消的互扰抑制能力为53 dB,进入接收电台数字域的互扰信号的ACPR约为30 dB,接收的混合基带信号频谱如图3所示。为便于表示算法的收敛速度,根据基带信号采样率fs,将对消比MICR收敛所对应的迭代次数n等价转换为时间t。

图3 基带接收信号功率谱示意图Fig.3 Baseband receive signal power spectrum diagram
基于上述条件,仿真的实现流程如图4所示。互扰信道响应hM阶数未知,由先验条件设定阶数M′=31。设信号s(n)和r(n)功率已归一化,同时为避免步长因子过大和自相关矩阵特征值扩散导致的算法发散,令IVSSTLMS算法μmax=0.1,文献[23]的VSSNLMS算法步长因子最大值为1,其余参数设置如表2所示。

图4 数字域线性互扰对消仿真流程图Fig.4 Digital linear mutual-interference cancellation simulation flow chart

算法参数参数取值(1)参数取值(2)IVSSTLMSκ,μmin20, 0.000 110, 0.001RLSλ0.990.9VSSNLMSα,βμmin0.995,800.0050.99,300.05
统计平均200次独立仿真结果,得参数(1)和(2)对应三种方法的MICR∞值,如表3所示,两种参数的MICR收敛曲线分别如图5和图6所示。

表3 两种参数对应的MICR仿真结果
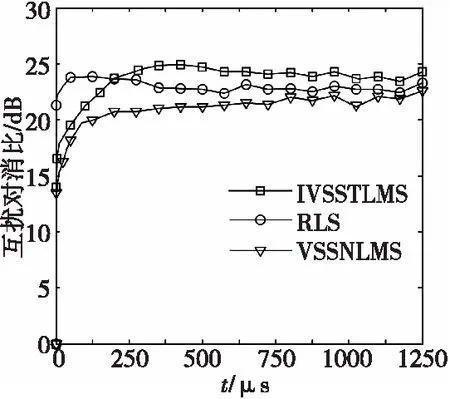
图5 参数(1)对应的三种对消方法MICR收敛曲线Fig.5 MICR curves of three cancellation methods for the parameter (1)
由表3和图5可见,对于参数(1),基于IVSSTLMS算法的数字域互扰对消方法的收敛速度略微慢于基于RLS算法的对消方法,MICR达到20 dB所需收敛时间约为60 μs,但本文方法最终能够达到的MICR∞比RLS算法提高约1.2 dB。与文献[23]的VSSNLMS对消法相比,MICR达到20 dB所需收敛时间缩短了50 μs以上,同时最终的MICR∞提高约2.5 dB。由表3和图6可见,对于参数(2),本文方法和RLS算法收敛速度无明显变化,而VSSNLMS算法MICR达到20 dB所需的时间增至了250 μs左右。同时,本文方法能够达到的MICR∞分别比RLS算法和IVSSNLMS算法提高了约4 dB和0.9 dB。两种参数的仿真结果反映出,本节IVSSTLMS对消法既具有快的收敛速度,又能够获得高的MICR和较低的计算复杂度,与现有对消方法相比,性能得到显著提升,能够较好地解决共址无线收发设备间互扰的数字域抑制问题。
4 结论
本文提出了基于IVSSTLMS算法的数字域共址无线收发设备互扰对消方法,该方法将迭代变步长与变换域LMS算法相结合,具有低的复杂度,在抑制参考信号相关矩阵特征值发散的基础上,有效解决了收敛速度与MICR相互制约的问题。仿真结果表明,本文方法的收敛速度和最终获得的MICR显著优于现有变步长LMS算法和RLS算法,能够有效实现数字域互扰对消,为解决共址无线收发设备间互扰问题提供了有效解决途径。
