MEMS离心隔爆滑块闭锁机构
2019-09-06聂伟荣席占稳李雯迪
徐 娜,聂伟荣,席占稳,郑 灿,李雯迪
(南京理工大学机械工程学院,江苏 南京 210094)
0 引言
随着弹药技术的发展,引信被赋予更多的功能,对引信各部分的体积分配与充分利用提出了更高的要求。因此,开展引信安全系统的微小型化研究已成趋势[1]。微机电系统(Micro Electro-mechanical System,MEMS)因其微型化、集成化、生产规模化、加工成本低等优点在军事领域得以迅速发展,成为实现引信小型化和功能拓展的关键技术之一[2]。
MEMS技术在引信中的一个重要应用方向就是MEMS安全系统。早期MEMS引信安全系统由Charles H.Robinson团队在1998年提出,并历经几代优化设计达到了较为成熟的技术[3-5]。近年来,国内Dakui Wang等人[6-7]在早期研究的基础上设计了一种适用于小口径弹丸的高可靠性微型安全系统,该系统采用电动推力器工作使锁臂变形释放隔爆滑块,滑块在离心力的作用下克服微弹簧的张力而实现闭锁。田中旺,范晨阳等人[8-9]针对小口径榴弹试验中后坐滑块未能成功闭锁问题进行闭锁机构的改善设计,将原有悬臂梁由直钩改成弯钩的同时加大卡头双翼的厚度和张开角度,并通过仿真分析证明了改善后的闭锁机构在提高强度的同时降低塑性变形。X.Y.Zhang等人[10]提出了一种具有柔性触点和倒钩锁定机构的加速度开关,当锁头被锁定时,柔性触点和倒钩锁定机构可以防止由于质量块的反弹或振动引起的冲击而导致开关打开。但该开关需在幅值为1 700g、响应时间小于0.3 ms的加速度信号下工作。
但上述MEMS安全系统都是应用于小口径榴弹且平行于弹轴放置,微小型传爆序列处在不同平面必然使得爆轰能量传递时改变方向造成能量损失,甚至导致微起爆器无法引爆导爆药和战斗部而造成“哑弹”的现象。对于闭锁机构的研究大多基于高冲击低响应时间的内弹道后坐过载环境,且闭锁机构在闭锁时易发生塑性变形。本文针对上述问题,提出一种垂直于弹轴放置的MEMS安全系统的离心隔爆滑块闭锁机构。
1 MEMS安全系统工作原理
图1为本文针对中大口径榴弹设计的垂直于弹轴放置的MEMS安全系统整体结构。主要由后坐保险机构、离心保险机构、指令锁保险机构、隔爆滑块、基板框架等组成。在正常发射时,弹丸经过膛内火药气体推动作用,产生较大的后坐过载,悬臂卡锁式后坐保险机构识别后坐过载环境向下运动解除对隔爆滑块的第一道保险。同时由于膛线的作用,弹丸会在同样时间内获得较大转速,使安全系统产生离心力。隔爆滑块在离心力的作用下向右运动解除对离心保险机构的约束,离心卡锁在离心力的作用下带动离心弹性梁向外侧运动,解除对隔爆滑块的第二道保险。由于离心力的持续作用,指令锁保险机构的柔性锁臂紧密抵在基板上,阻挡隔爆滑块继续向右运动。当弹丸飞行至炮口安全距离之外,通过弹道实时信息控制电推销器发火,推动指令锁柔性锁臂进入活动腔,解除对隔爆滑块的延期保险。在离心力作用下,隔爆滑块继续向右运动,闭锁机构进而运动到位并锁定,传爆序列上下对正,引信处于待发状态。闭锁机构的可靠闭锁和准确定位是保证传爆序列对正的前提,对整个系列动作的完成至关重要。
图1 MEMS安全系统整体结构Fig.1 Overall structure of MEMS safety system
2 闭锁机构设计
考虑隔爆安全性因素,隔爆滑块从初始位置运动至闭锁位置距离为3 mm。闭锁机构由L型闭锁梁、锁头、刚性定位块组成,如图2所示。锁头设置在隔爆滑块空槽中,槽壁能够防止闭锁时L型闭锁梁出现变形过大无法恢复问题,刚性定位块起到限制锁头位移作用。该闭锁机构兼具闭锁和定位的功能,可以在外弹道离心力作用下闭锁时不发生塑性变形,准确定位,保证传爆序列有效对正。
当外界激励大于临界值时,隔爆滑块上的锁头可以撑开L型闭锁梁实现快速可靠闭锁,使得隔爆滑块上传爆空腔与起爆器和传爆药处在对正位置,同时L型闭锁梁在闭锁时不发生塑性变形,提高了MEMS安全系统的安全性与可靠性。
图2 闭锁机构结构图Fig.2 Blocking mechanism structure
3 闭锁机构的基本分析
3.1 理论分析
锁头能够完全进入锁座是闭锁机构可靠闭锁的前提。假设锁头撑开闭锁梁过程中微弹簧拉力和锁座阻力不变,其值等于锁头刚好进入锁座临界状态时的最大值,则此过程中隔爆滑块的轴向加速度表达式[11]为:
(1)
式(1)中,m为隔爆滑块和微弹簧的总质量;K为微弹簧的弹性系数;Δy为锁头由静止至完全进入锁座的轴向位移;FNmax为锁头完全进入卡座临界时刻对闭锁梁的挤压力;fNmax为锁头完全进入卡座临界时刻对闭锁梁的摩擦力,fNmax=μFNmax;θ为锁头侧边与其中轴所成的角度。
假设锁头能够完全进入锁座,则临界时刻闭锁梁受力如图3所示。锁座闭锁梁在锁头的挤压作用下产生的x轴向位移最大,锁头对闭锁梁的作用力最大,表达式为:
(2)
式(2)中,E为材料弹性模量;b为闭锁梁等截面梁的线宽;h为闭锁梁等截面梁的高度;L为锁头底端至末端的距离。
图3 锁头完全进入锁座临界时刻闭锁梁受力分析Fig.3 Stress analysis of the locking beam when the lock head completely enters the lock seat
将相关设计参数代入式(1)、式(2)中,推算出此过程中离心隔爆滑块的实际运动加速度aJ>0,由此可判断此过程中隔爆滑块锁头能够完全进入锁座。
3.2 仿真分析
为了更清楚地了解隔爆滑块的闭锁运动过程,利用ABAQUS有限元分析软件建立闭锁机构有限元模型,分析其闭锁可靠性。安全系统整体是基于电铸镍材料设计的MEMS结构,由于电铸镍材料的机械性能与电铸过程中的电流密度、电铸时间、电铸面积、加工厚度等因素有密切关系,材料参数会有一定的差异,为便于分析,电铸镍材料的参考参数[12]如表1所示。

表1 电铸镍材料参数
中大口径榴弹弹丸在发射过程中一直处于旋转状态,在出炮口时转速最大,达到8 000 r/min。出炮口之后进入飞行环境阶段,受到空气阻力等因素影响,转速逐渐降低,在达到炮口安全距离之外后,转速降低至7 000 r/min左右。结合设计要求,对结构施加离心加速度,分析其仿真结果。根据仿真结果得出离心加速度在268.1g时(对应转速约为7 000 r/min)闭锁机构锁头进入L型闭锁梁锁座。在该环境下得到闭锁机构应力云图和锁头位移曲线图,如图4所示。
图4 268.1g离心加速度下闭锁机构仿真结果Figure 4 Simulation results of the locking mechanism under 268.1g centrifugal acceleration
从图4(a)中可知隔爆滑块闭锁状态,最大应力为530 MPa出现在弹簧拉伸弯曲处,小于电铸镍材料的屈服极限750 MPa,整体结构不会发生塑性变形,符合强度设计要求。从图4(b)可知,锁头在t=1.5 ms时位移达到2.978 mm完成第一次闭锁,由于闭锁机构中刚性定位块的存在,锁头与刚性定位块产生碰撞作用出现短暂反弹现象。此时离心力持续作用,锁头在反弹一段距离后继续向锁座运动,运动距离和碰撞速度减小,锁头在t=3.05 ms时位移达到2.981 mm完成第二次闭锁。锁头第二次闭锁碰撞反弹之后在离心力作用下继续向锁座运动,在t=4.1 ms时第三次闭锁成功,此时位移达到3.001 mm。在t=4.1 ms之后,锁头进入锁座后与刚性定位块继续发生多次碰撞反弹,但在反弹过程中,锁头始终没有脱离L型闭锁梁的约束,最后稳定在锁头与锁座紧密接触状态。L型闭锁梁紧紧卡住锁头,闭锁机构已经实现稳定闭锁。
图5为闭锁机构锁头在进入含L型闭锁梁锁座的最终闭锁状态。L型闭锁梁被锁头撑开后在弹力的作用下恢复卡住锁头从而完成闭锁。L型闭锁梁在整个闭锁过程中的应力变化如图6所示。L型闭锁梁在t=3.35 ms时达到最大应力396 MPa,小于电铸镍材料的屈服极限750 MPa,说明闭锁梁不会发生塑性变形,最终会在弹力的作用下恢复从而卡住锁头实现稳定闭锁。

图5 闭锁机构最终状态Fig.5 Final state of the locking mechanism

图6 L型闭锁梁应力变化Fig.6 L-shaped locking beam stress change
4 实验验证
4.1 离心实验
采用UV-LIGA技术加工出的MEMS安全系统样机如图7所示。基于仿真结果,通过离心实验台开展闭锁过程加载试验,验证闭锁机构的可靠性。实验前分别将后坐保险机构和离心保险机构去除,将指令锁保险机构柔性锁臂推入活动腔。
离心实验平台搭建如图8所示。离心转盘的电机采用直流无刷电机控制器(WS55-180)控制,通过Arduino开发板控制电机电压信号,转盘上装有磁铁,霍尔传感器每接近磁铁一次即产生一个低电平信号发送到Arduino开发板,根据两次低电平信号的时间差值可以计算出离心转盘的转速。MEMS安全保险机构受到的离心加速度可以表示为:
(3)
式(3)中,n为离心转盘的转速,r为MEMS安全系统样机与离心转盘圆心的距离。
图7 MEMS安全系统样机Fig.7 MEMS safety system prototype
图8 离心实验Fig.8 Centrifugation experiment
为了使离心实验更加精确,对同一批次加工的四组样机进行编号,沿顺时针方向依次安装在转盘半径方向,如图9所示。四组样机距离转盘中心均为5 cm,在相同转速下进行实验。
图9 四组样机实验图Fig.9 Four sets of prototype experiment diagram
为了确定闭锁机构从未能闭锁状态到闭锁成功状态的临界离心加速度,实验初始对转盘施加转速为2 100 r/min(对应离心加速度241.6g),观察到闭锁机构未能闭锁。之后对转盘依次增加10 r/min的转速,观察闭锁机构实验结果。当转盘转速为2 220 r/min即离心加速度为269.5g时,1、2、3号样机均实现稳定闭锁。实验结果如表2所示,闭锁机构离心实验后如图10所示。
表2 闭锁机构实验结果
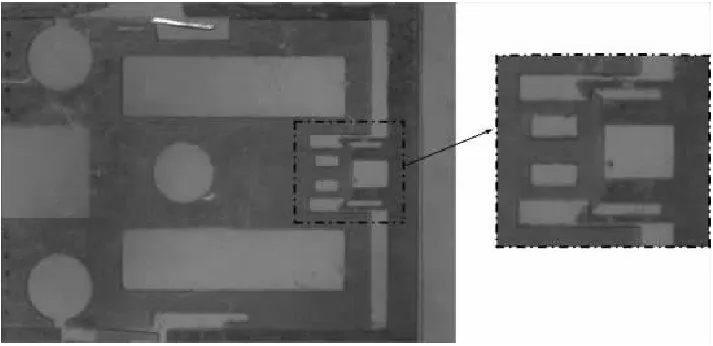
图10 离心实验后闭锁机构状态Fig.10 Locking mechanism status after centrifugation
对于4号样机在在离心加速度为269.5g时未能闭锁的现象,考虑到4号样机闭锁的临界离心加速度可能高于269.5g,对转盘继续施加更高转速单独观察4号样机的闭锁状况。实验过程中发现4号样机在转盘转速达到3 500 r/min时(对应离心加速度670.4g)仍然不能闭锁,说明4号样机可能由于加工误差或装配误差较大等因素始终无法闭锁。
4.2 实验结果分析
实验结果表明,1,2,3号样机在离心加速度为269.5g时,均能闭锁成功,与离心加速度为268.1g时实现闭锁的仿真结果基本吻合。针对4号样机未能闭锁的结果,采用SEM扫描电镜对其进行特征尺寸测量,结果如图11。

图11 4号样机特征尺寸测量Fig.11 Sample size measurement of sample 4
从图11中可知,锁头与闭锁梁的重合尺寸为98.59 μm,闭锁梁在撑开方向的有限位移空间为65.73 μm,闭锁梁在隔爆滑块槽壁的阻挡下无法被锁头完全撑开使得闭锁失败。误差原因主要来自:1)加工误差。采用UV-LIGA技术加工时,考虑到SU-8胶溶胀误差和腐蚀误差造成结构尺寸偏小的现象,采用了掩膜版线宽补偿方法,但由于掩膜版的补偿量未能精确把握,加工出的样机出现尺寸偏大的现象。2)装配误差。考虑加工成品率等因素,采用多层UV-LIGA技术分别加工出弹簧、后坐保险机构、离心保险机构、隔爆滑块及基板框架五个部件,在微操作台上完成MEMS安全系统各部件的拾取、定位、组装。由于各部件尺寸微小,在组装过程中产生了装配误差。最终导致闭锁梁在撑开方向的有限位移空间小于锁头与闭锁梁的重合尺寸,使得4号样机未能实现可靠闭锁。
5 结论
本文提出了一种应用于中大口径榴弹且垂直于弹轴放置的MEMS安全系统的离心隔爆滑块闭锁机构。该机构可以实现在外弹道离心力作用下可靠闭锁和准确定位的功能,且闭锁时不发生塑性变形。通过理论分析了闭锁机构锁头进入锁座的可行性,采用仿真分析和样机实验验证了闭锁机构的功能。仿真分析闭锁机构在268.1g的离心加速度下实现可靠闭锁,L型闭锁梁最大应力为396 MPa,小于电铸镍材料的屈服极限,不会发生塑性变形。样机实验得出闭锁机构在离心加速度为269.5g时能够闭锁成功。仿真和实验结果表明,此闭锁机构在达到临界离心加速度时能够实现可靠闭锁,且L型闭锁梁在闭锁时不发生塑性变形。由于闭锁机构兼具定位的功能,通过有限元仿真分析发现锁头运动至最大位移与刚性定位块碰撞后出现数次反弹现象,后期可以考虑将定位作用分离出来,并从柔性碰撞方面对闭锁机构作进一步研究。
