二维弹道修正组件滚转角测量误差补偿方法
2019-09-06杨恺华钱荣朝郑吉阳徐国泰
杨恺华,钱荣朝,郑吉阳,徐国泰
(1.机电动态控制重点实验室,陕西 西安 710065;2.中国人民解放军63752部队,陕西 渭南 714000)
0 引言
二维弹道修正组件技术是一种低成本精确打击前沿技术,无需新研制弹药,仅通过更换弹道修正组件即可满足大批量库存无控弹药智能化、灵巧化改造的迫切需求,同时还能够减小附带毁伤,提高火炮的机动性能,降低后勤保障费用[1]。作为控制模块的重要输入信息,二维弹道修正组件的翼面实时滚转角的准确测量,是二维弹道修正系统的关键技术之一。
目前翼面滚转角的测量存在太阳方位角测量法、陀螺测量法、加速度计法和磁探测法[2]等方法。太阳方位角传感器的两个光敏器件分别安装在弹上光缝之内,当弹丸进行滚转运动时,太阳光会透过光缝照射到光敏器件上产生脉冲信号,通过两个光敏器件在同一周期内输出脉冲信号的时间差与一个光敏器件连续输出脉冲信号的时间差之比来计算弹丸滚转角度;但该方法必须在白天光照充足的情况下使用,具有较大的应用局限性[3]。陀螺测量法是根据角速度率陀螺的输出分量,建立微分方程组数值积分,解算出滚转角,但由于积分的作用,角速度的测量误差将随时间累积[4]。加速度计法利用弹丸高速自转,造成加速度计所在位置相对于准弹体坐标系存在垂直于x轴的速度从而产生科氏加速度;科氏加速度与弹丸滚转角存在确定关系,通过分析科氏加速度的变化,确定对应的弹丸滚转角,但是加速度计无法适应高动态环境[5]。
磁探测法利用地磁场良好的矢量特性和稳定性,采用双轴磁强计及GPS组合测量弹丸滚转角,由GPS速度信息确定弹丸的俯仰和偏航姿态,然后根据双轴磁强计测量的弹丸径向磁场强度,可以实时解算出弹丸滚转姿态。磁传感器具有价格便宜、无累积误差、抗高过载、可以全天候工作等众多优势,是实现弹体滚转测量的最佳途径之一[6-8]。但是通过磁传感器测量翼面滚转角时,由于电机磁钢的存在,使磁传感器测量到的不仅有地磁场信号,还会有随着翼面转动的干扰磁场信号,导致测量存在误差。针对此问题,本文提出了基于干扰磁场标定的滚转角测量误差补偿方法。
1 翼面滚转角误差来源
二维弹道修正组件主要由带有两对气动翼面的外壳和主体两部分构成,组件主体通过弹口螺纹与弹丸相固连,翼面部分与组件主体通过轴承连接,可以相对转动。如图1所示,主体部分头部即图中标有1的部分安装有磁传感器,安装方式为:磁传感器x轴沿弹轴方向安装,磁传感器的y轴和z轴垂直于弹轴方向安装;电机部分位于图中标2的位置,其中电机绕组与主体固连,磁钢贴在带有气动翼面外壳的内壁上,当翼面与主体存在相对转动时,磁力矩电机就会产生控制所需的电磁力矩和驱动电路的电流。但是通过磁传感器测量翼面滚转角时,由于电机磁钢的存在,导致磁传感器测量到的不仅有地磁场信号,还会有随着翼面转动的干扰磁场信号,因此测量存在误差。
在弹丸飞行过程中,弹丸转速和翼面转速均处于一直变化的状态,如图2所示为二维弹道修正组件弹丸转速和翼面相对于弹丸的转速仿真,可以看出,翼面相对于弹丸转速变化范围为:200~500 r/s。图3所示为弹丸飞行过程中外场实测数据频谱,截取时长为0.5 s。其中图3(a)为10 s时数据,根据频谱分析可得此时弹丸转速和翼面转速分别为350 r/s,250 r/s;图3(b)为50 s时数据,此时弹丸转速和翼面转速分别为208 r/s,200 r/s,弹丸飞行其他时间和图3情况类似。在整个弹丸飞行过程中磁传感器测量到的信号由两个频率不断变化的正弦波叠加而成,因此很难通过调频进行解调。

图1 二维弹道修正组件Fig.1 Appearance of TDTCK

图3 外场实测信号Fig.3 Signal of magnetic sensor
2 翼面滚转角误差补偿方法
设电机磁钢的磁场向量为Mt=[MxtMytMzt],而磁传感器测量到的磁场信号为弹体坐标系下的磁场向量为Mb=[MxbMybMzb],则当翼面相对于弹丸发生旋转时,Mb与Μt之间存在从地面坐标系到准弹体系的转换关系,如式(1)所示[9-10]:
(1)
式(1)中,γrel为组件翼面相对于弹体的滚转角度。
显然无论在地面标定或者弹丸飞行过程中,由于机械装配的原因,磁传感器和电机磁钢在弹轴方向的距离保持不变。因此磁传感器输出信号与电机磁钢磁场均满足式(1)的关系,所以在地面上根据相对转角对翼面干扰磁场进行标定的结果在弹丸飞行过程中也适用,因此以弹丸飞行过程中磁传感器信号减去地面上标定的结果作为磁传感器测量误差的补偿方法。
在弹丸发射前,固定二维弹道修正组件主体,转动翼面若干圈,此时磁传感器测量到的磁场信号中正弦分量为翼面干扰磁场,由于安装磁传感器的组件主体和大地没有相对滚转,因此地磁场表现为直流分量。对磁场信号截取完整周期,减去其均值,即得到干扰磁场。由于系统测量速度、解算速度、执行机构响应速度等因素的限制,在标定时,将相对转角分成36份,即每隔10°对磁传感器信号进行标定,如图4所示。且组件控制过程中,翼面相对弹丸的转速始终大于200 r/s,近似解算可满足系统要求。

图4 翼面磁场标定结果Fig.4 Calibration of fin magnetic field
弹丸出炮口后,在弹丸飞行过程中,从弹尾观察,弹丸相对地面高速右旋,翼面则相对地面左旋,因此,此时相对转角测量装置会每隔10°输出一个翼面相对弹丸的滚转角度,当弹载控制器收到此相对转角信号时,用该时刻磁传感器测量到的磁场信号减去发射前标定的翼面干扰磁场信号,即可得到磁传感器测量到的地磁场信号,用于解算翼面相对于地面的滚转角度。
3 仿真与试验验证
3.1 Matlab仿真
为模拟外场磁传感器信号,构造信号y,为y1、y2两个信号之和,y1为频率为250 Hz,幅值为50 V的正弦信号,代表磁传感器测量到的翼面干扰信号;y2为频率为225 Hz,幅值为20 V的正弦信号,代表磁传感器测量到的地磁信号。并且分别给两个信号都加上均值为0,均方差为2的干扰误差,代表磁传感器本身测量的系统误差,则弹丸飞行中磁传感器测量到的总信号为地磁信号和翼面干扰磁场信号之和,如图5所示。

图5 磁传感器测量信号仿真Fig.5 Simulation of magnetic sensor measurement signal
利用上述方法,对翼面干扰磁场进行标定,得到误差补偿后的地磁场信号,并分别利用和磁场,即模拟磁传感器测量到的真实磁场,和标定后的地磁场进行翼面滚转角解算,解算结果误差如图6所示,对误差结果进行统计,标定前的解算误差均值为0.020 6°,均方差为16.934 4°,标定后的解算误差均值为0.013 6°,均方差为3.239 5°。可以发现经过误差补偿后,误差降为处理前的20%以下,可以有效减小翼面滚转角解算误差的均方差。
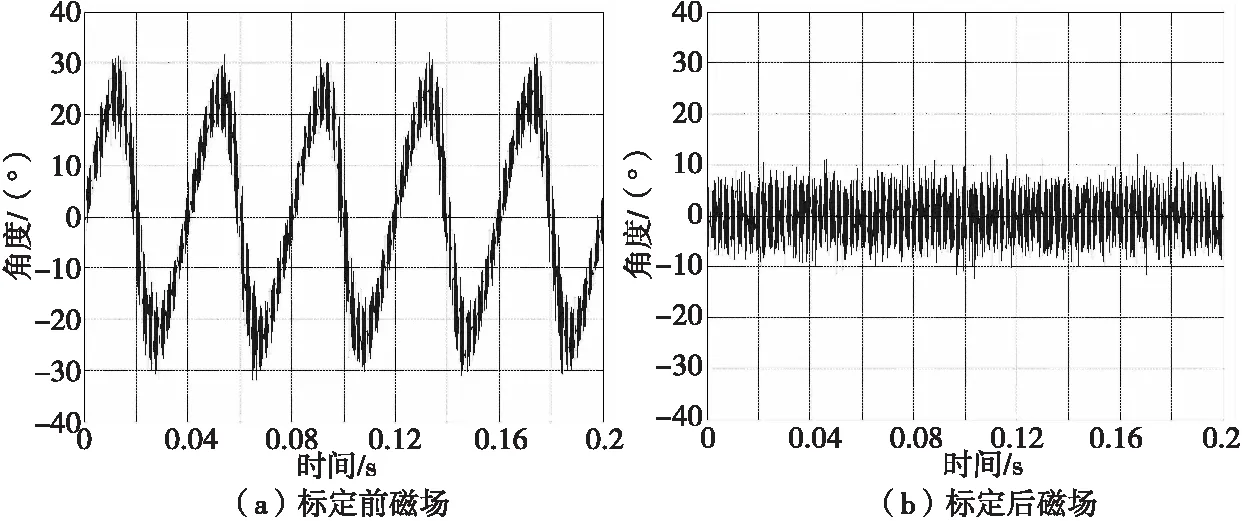
图6 滚转角的仿真误差Fig.6 Simulation error of roll angle
3.2 二维弹道修正组件实际应用
选用固定翼二维弹道修正组件外场飞行试验实际测量数据作为验证对象,在该试验中,通过在组件主体安装磁传感器测量磁场信号,安装光电管以光电管输出峰值时刻所对应的角度作为滚转角得理论值。利用标定的翼面磁场处理磁传感器信号,从原始信号中消去翼面干扰磁场,图7(a)为原始信号及其频谱,图中286 Hz频率成分代表弹丸转速,410 Hz频率成分代表翼面相对弹丸的转速,正是该频率成分影响弹丸滚转角解算。根据标定的翼面干扰磁场对原始信号进行处理,去除翼面干扰磁场,处理后的信号及其频谱如图7(b)所示。
如图6(b)所示,通过该处理,代表翼面相对弹丸转速的翼面干扰磁场信号频率成分明显减小,有利于滚转角解算。选取回读数据中0~0.8 s的数据进行处理,并与光电管信号解算得滚转角进行对比,将解算误差进行统计分析,如图8所示,均方差为4.801 6°,补偿前均方差对比,满足二维弹道修正组件的系统误差指标要求。
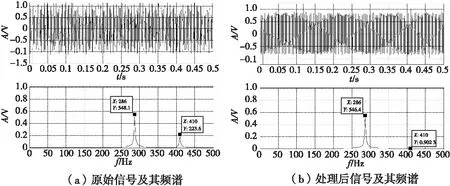
图7 磁传感器信号及其频谱Fig.7 Magnetic sensor signal and spectrum

图8 滚转角实测误差Fig.8 Measurement error of roll angle
4 结论
本文提出了基于干扰磁场标定的二维弹道修正组件滚转角测量误差补偿方法。该方法通过弹丸发射前对翼面磁场进行地面标定,然后在弹丸飞行中,用磁传感器测量得到的磁场信号实时减掉先前标定的翼面干扰磁场的方法,对翼面滚转角测量误差进行补偿。仿真结果表明,该方法滚转角解算误差降为处理前的20%以下。外场试验结果表明,该方法大幅提高了滚转角解算精度,解算误差5°以内,可以有效消除干扰磁场。解算得到的翼面滚转角满足二维弹道修正组件翼面滚转角测量系统要求。
