基于相关滤波和离散度分析的帧同步识别
2019-09-06雷迎科
邵 堃,雷迎科
(国防科技大学电子对抗学院, 安徽 合肥 230037)
0 引言
从利用传统的短波、超短波电台实现战场实时通信到数据链技术在武器装备上的应用,军事通信技术正在飞速地发展。军事通信技术不断结合发展现代通信技术与战术理论,目的是保证战场的通信并进行信息实时的传输与反馈。军事通信信号是以帧为单位进行发送和接收的,帧内除了有内容可变的字段外还存在一些位置、内容固定不变的固定字段。如文献[1—3]所述,若收发双方已知帧格式,可以通过比对处理对接收到的数据准确分组,完成信息的传送。作为非合作方,面对未知的帧结构,对侦察截获到的数字序列进行准确的帧切分和帧同步的识别是对协议识别的第一步。因此,国内外许多学者开展了对帧同步识别[4-13]的研究。
李歆昊等人提出一种基于多重分形谱的帧同步字盲识别方法[5]。该方法利用同步段与信息段的有偏性识别帧同步,但在同步码是伪随机性序列的情况下,该方法的识别性能明显下降。文献[6]提出一种累积滤波算法,该算法利用帧头码字的强相关性,能够有效地检测出帧头部分的长度和起始位置,但该算法的识别性能受阈值选择的制约。王和洲等人提出一种比特流切割算法[7],尽管该算法适用于完全未知的协议类型,但其一定程度地牺牲了空间上和时间上的复杂度。文献[8]提出一种基于偏三阶相关函数峰值特性的识别方法来识别帧同步码序列,虽然该方法对样本数据量要求较低,但其只适用于同步码序列是m序列的情况。文献[10]提出了对编码加扰序列的帧同步识别方法,该方法结合扰码重建技术先实现粗同步,再进行解扰实现精同步位置识别,并将算法推广到含噪声情况,但该方法受限于编码方式和参数的影响。文献[11]提出的模糊匹配方法是将同步码的码型作为先验信息进行匹配,只对码型确定的同步码识别率较高,对同步码码型不确定、码长不确定的数字信号识别率明显降低。利用滤波算法[11-13]寻找同步码起始位置的过程中涉及到门限最优选择,可能导致算法达不到最优性能,且多数算法未考虑关键字段与同步码直接连接的情况。目前的帧同步识别方法普遍存在两个问题:一是对于判决门限的选择没有一个具体的准则,门限普适性不高;二是基于相关的帧同步码识别方法无法准确识别与固定字段连接在一起的帧同步码。本文针对上述问题,提出了基于相关滤波和离散度分析的帧同步识别方法。
1 帧同步识别基础
1.1 帧结构
在战场环境下,通信方为了实现通信的隐蔽性和防截获性[14],需要完成信息的间断传输,为了确保收发端顺利传输信息,发送方会选择将数据打包成帧后进行传输,即发送端在每帧的开始插入一段特殊的码组作为同步序列。根据协议类型的不同,同步序列长度不定码型不定,同步序列部分用于帧同步,信息部分用来承载来自高层的传输块数据,帧封装的一般格式如图1所示。

图1 帧封装一般格式
Fig.1 Frame encapsulation general format
1.2 比特流数据的特点
图2表示具有集中插入式帧结构的比特流数据。对帧同步进行识别时,不仅要考虑到帧结构还要考虑到比特流数据的特点:
1) “01”性。比特流数据中包含的元素具有二元性,非0即1。
2) 无界性。对于非合作方来说,对不加处理的数据无法区分帧起始点和结束点,比特流数据的无界性如图3所示。
3) 关联性。通信方以帧为单位进行数据传输。每段比特流数据承载着不同的内容。通信方为了保证信息的实时传输和表达准确性和效率,各数据帧之间的同步序列等关键字段存在着一定的关联性。
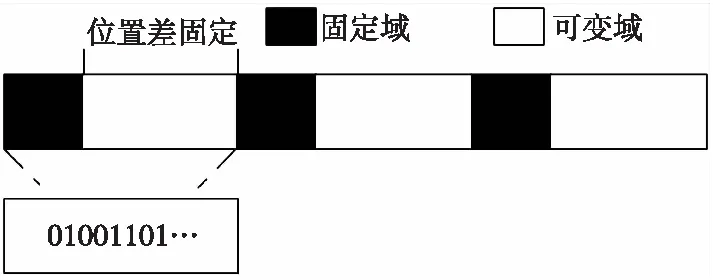
图2 集中插入式帧同步比特流数据特点Fig.2 Centralized insertion frame synchronization bitstream data characteristics

图3 无界性示意图Fig.3 Schematic diagram of unbounded property
1.3 同步码的相关性
为了接收机可以通过相关滤波的方式准确识别同步码,要求同步码具有很强的自相关性,因此,不论是较短的巴克码还是较长的伪随机序列的自相关特性曲线都具有尖锐的单峰。
设一组n位的帧同步码组为x=(x1,x2,…,xn),其相关性[15]可由式(1)表示:
(1)
同步码的相关函数满足式(2)关系:
R(0)≫R(j)
(2)
即同步字段具有自相关性强而互相关性差(在零附近分布)的特点,由于信息段经过信道编码后,序列被伪随机化,所以信息段的自相关与互相关的差异要小于同步字段。
1.4 相关滤波
相关滤波[11]是信号处理领域一项重要的技术,它可以利用信号的相关性对时移信号进行处理,从而抑制和防止干扰、提高信噪比。
1.5 离散度分析
离散度分析法是统计学一项重要的方法,主要用来测度一组数据的分散程度。分散程度反映了一组数据远离其中心值的程度。对于一组数据变动趋势的分析,要从集中趋势和分散程度两个方面进行说明。
2 帧同步识别方法
本文提出基于相关滤波和离散度分析的帧同步识别方法,该方法从帧结构、比特流数据特点和同步码相关性出发,通过相关滤波和离散度分析对帧同步进行识别,该方法包括帧长识别、关键字段识别和同步码识别三个部分,流程图如图4所示。

图4 基于相关滤波和离散度分析的帧同步识别方法流程图Fig.4 Flow chart of frame synchronization recognition based on relativity filter and dispersion analysis
2.1 基于相关滤波的帧长识别
2.1.1 填充矩阵的构造
设接收到的数字序列为y,同步序列m表示为(a1,a2,a3,…,am),其余帧头、控制协议、消息体、校验等部分设为q,表示为(am+1,am+2,am+3,…,aL),其中a∈{0,1},帧长L=Lm+Lq。作为非合作方在接收数字序列时,会因较差的信道环境和前期滤波解调等步骤的偏差使得数字序列的某些位置出现误码。根据集中插入式帧同步之间的相关性,将数字序列y按长度n分组,排列成m行n列的填充矩阵H。

(3)
通过公式(3)可以滤除多余数据对帧长识别的影响。当n=L时,填充矩阵H的排列方式即为图5所示,数据帧中的同步字段将会出现在填充矩阵每行的相同位置。
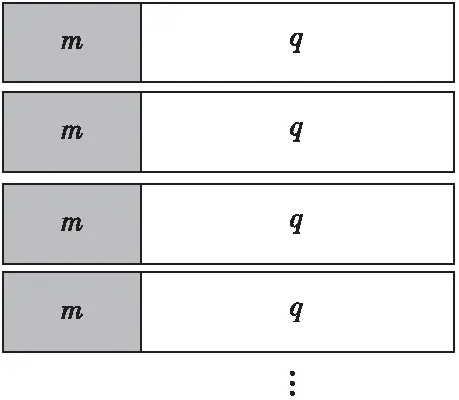
图5 等长帧理想接收模型Fig.5 Constant length frame reception model
2.1.2 加权相关值的计算
(4)
对填充矩阵H的每列求均值。
(5)
根据帧数据的“01”性改写c(i)。
ifc(i)>0.5
b(i)=1-c(i);
else
b(i)=c(i);
end

r(i)=f(b(i))(i=1,…,n)
(6)
最后计算填充矩阵的加权相关值:
(7)
输出v(n),当v(n)≥Wh时的第一个n值为帧长L,其中Wh为门限值。
加权相关值算法的优点:从分类的角度,加权相关值可以有效地将不同长度的n按相关程度区分开。考虑存在误码的情况,通过两次均值计算,使得算法具有较高的容错性。
加权相关值算法的不足:加权相关值算法只能根据经验对门限Wh选择,极有可能造成漏检和误检。因此,为了提高识别效率,降低对门限Wh精度的要求,在保证一定的识别率的前提下,根据加权相关值之间的关系,提出一种基于三次滤波的帧长识别算法。
2.1.3 三次滤波算法基础
对帧结构的分析可知,关键字段之间存在位置差固定的关联规则。由式(7)可知,加权相关值v满足下列性质:
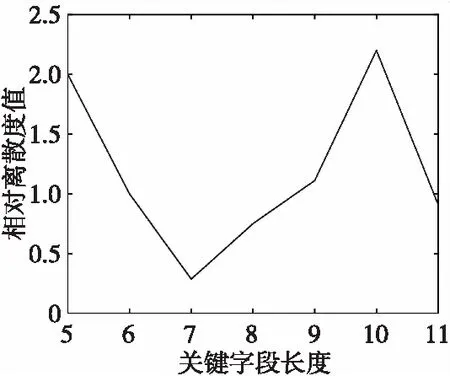
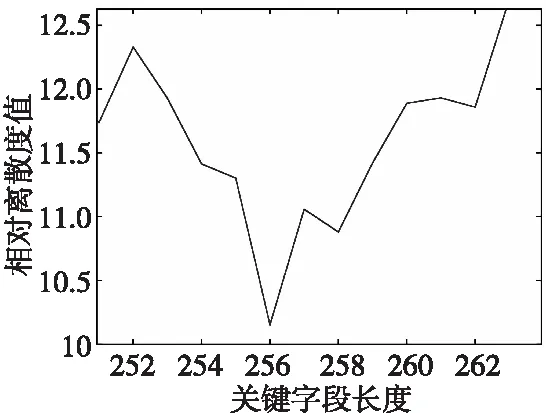
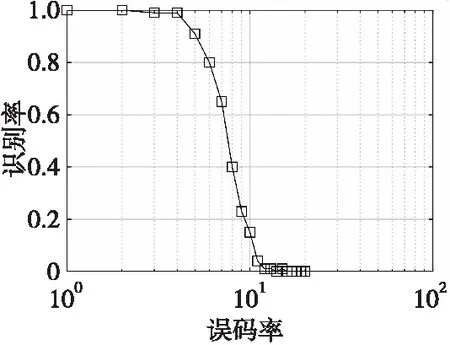
2) 当n 2.1.4 三次滤波算法的步骤 1) 第一次滤波:选取一个相对较小的门限W,将填充矩阵的列数从小到大变化,得出三个大于等于门限W的v(n),按照其原有的顺序组成步径为3的判断矩阵,如式(8): (8) 2) 第二次滤波:判断n1、n2、n3是否同时满足下列关系: ①Δl=n2-n1=n3-n2; ②n2可以被Δl整除。 3) 第三次滤波:判断加权相关值是否满足下列关系: v(n1) 经过三次滤波后,Δl即是帧长值。若上述二、三次滤波有一次不满足,则给W重新赋值W=max{v(n1),v(n2),v(n3)},继续上述循环直到满足条件或超时退出。 2.1.5 帧长识别算法性能分析 当门限W取适当的值使得判断矩阵P中包含v(kL)(k∈N+)时,在无误码的情况下,帧长识别率为100%;当门限值W使得判断矩阵P中不包含加权相关值v(kL)(k∈N+)时,经过之后的两次滤波重新修正了门限值,滤除弱相关性的序列,继续循环识别帧长。 经过滤波处理可以对初始门限值进行修正,降低了对门限选择的要求。 关键字段是指在信息传输过程中具有特殊作用的字段,如同步字段和对时隙类型、脉冲形式、航迹号、密钥号进行标识的字段。多数关键字段在帧内的位置、内容固定不变,但传输消息经过了编码、交织、扩频以及信息加密处理等,使得消息中的关键字段被分散,有的可能直接与同步字段连接,本节中的关键字段是指包含同步字段在内的位置、内容固定的字段,工作流程如下: 1) 根据求得的帧长值L重新构造填充矩阵。 (9) 2) 求填充矩阵每列的相关值,进一步构造相关矩阵。将相关值与门限比较进行判决,统计满足条件的列。 3) 统计所有连续满足条件的列,得到关键字段的识别结果,其中最长的一段关键字段X有可能是帧同步码。 经过2.2节的计算可初步确定接收序列中同步码的位置,但是所提取的关键字段X中可能既包括同步码也存在一些固定字段。为了确定基于相关值法提取的关键字段中是否包括固定字段,并进一步将同步码与固定字段准确分割开,提出一种基于离散度分析的帧同步码识别方法。 通过离散度分析法可以得到各组数据远离中心值的程度。根据同步码的自相关函数值等于同步码长,互相关函数值始终在0值附近小范围内波动的特性,对关键字段的相关函数进行离散度分析,可以识别序列中的帧同步码。 在该处分析中,数字序列的值用±1,将关键字段X带入式(1)求得相关函数R(j),对相关函数进行离散度分析: (10) 式(10)中,σ表示关键字段互相关函数值相对0值的波动程度。但是σ只反映了除自相关值外的相关函数的波动程度,是数值的绝对量,无法反映相关函数的整体离散情况,因此引入相对离散度值: (11) 依次减小关键字段X的长度,求出对应的相对离散度值,若n等于序列X长度时μn最小,则说明关键字段X即为同步码,若不然,则当μn取最小值时对应的n值是同步码的长度。 为防止噪声对识别结果产生的影响,在一定范围内取多个m值,重复上述过程,统计每个n值对应的多个相对离散度值,并对其取平均: (12) 实验一 巴克码识别 图6中横坐标填充矩阵列数即为数字序列中帧的长度值,图中在横坐标等于51处加权相关值出现第一个峰值,之后的峰值对应的帧长值是实际帧长的倍数,这是由基于相关的帧长识别算法决定的,该算法正是利用相邻峰值间的帧长度差固定的原则求出帧长。图7中横坐标对应一帧数据中的各比特位,纵坐标表示填充矩阵每列的相关值,其中相关值大于门限的位置是关键字段,即1~11 bit。图8给出了同步码的识别结果,图中在7 bit位置相对离散度值出现最小值,代表1~7 bit是同步码,实验数据识别结果与题设完全吻合。 实验二 伪随机序列识别 实验参数:帧同步码是256 bit的伪随机序列;同步码后有42 bit固定字段;帧内随机插入不等长的固定字段;帧长为1 500 bit;接收序列含有50帧数据。 图6 帧长识别结果Fig.6 Frame length recognition results 图7 关键字段识别结果Fig.7 Frequent sequence recognition results 图8 同步码识别结果Fig.8 Synchronization code recognition results 为了验证基于相关滤波和离散度分析的帧同步盲识别方法的普适性,选择帧长较长、同步码是伪随机序列、帧结构复杂的数字序列作为实验对象。图9给出了帧长识别的结果。图10给出了帧内关键字段的识别结果,图中相关值等于1的位置即为帧内位置和内容固定的关键字段。图11和图12给出了帧同码的识别结果,在256 bit处相对离散度值出现最小值。该方法可以识别出帧长、关键字段、同步码,实验结果与题设数据完全吻合,证明该方法能够实现对帧同步的盲识别。 图9 帧长识别结果Fig.9 Frame length recognition results 图10 关键字段识别结果Fig.10 Frequent sequence recognition results 图11 同步码识别结果1Fig.11 Synchronization code recognition results 图12 同步码识别结果2Fig.12 Synchronization code recognition results 实验三 不同误码率下的识别率实验 为了检验本文方法的识别性能,在不同误码率条件下进行蒙特卡洛实验。 图13 帧长识别率Fig.13 Frame length recognition rate 图14 同步码长识别率Fig.14 Synchronous code long recognition rate 图15 同步码起始位识别率Fig.15 Synchronous code start bit recognition rate 误码率Pe 00.010.020.030.040.050.060.070.080.090.1帧长识别率1.001.001.001.001.001.001.001.001.001.000.99同步码长识别率1.001.001.000.990.990.910.800.650.400.230.15同步起始位识别率1.001.001.001.000.981.000.950.880.770.700.56 从表1可知,在误码率为6%以内,该方法对数字序列的帧长、同步码长、同步起始位的识别率达到80%以上,有较高的识别率。 本文提出了基于相关滤波和离散度分析的帧同步识别方法。该方法以集中插入式同步码作为研究对象,首先通过构造填充矩阵初步消除了数据冗余对识别算法的影响;然后通过三次相关滤波自适应地改变门限值,完成帧长的识别,解决了帧同步识别算法中门限选择难度大的问题;之后利用相关值识别关键字段,初步确定同步码的位置;最后通过离散度分析方法,准确地将同步码与固定字段分割开。其中利用相关滤波修正门限值的方法和利用离散度分析精确识别同步码的方法是由本文首次提出。通过对巴克码和伪随机序列作为同步码的数字序列的仿真实验表明,该方法能有效识别帧长、关键字段和同步码,并且在误码率为6%以内仍能达到较高的识别率。2.2 关键字段识别
2.3 基于离散度分析的帧同步码识别

3 实验仿真
3.1 无误码的情况





3.2 有误码的情况




4 结论
