双向单程伪距测量平滑卫星授时数据
2019-09-06韩宜静曾芳玲汪海兵
韩宜静, 曾芳玲, 汪海兵
(国防科技大学电子对抗学院,安徽 合肥 230037)
0 引言
无线传感器网络、编队执行任务的微小卫星群、组网雷达以及各种需要协同的系统,重要的一项支撑技术就是系统各节点间的时间自同步技术,分布式系统的节点时间自同步通常采用双向单程伪距测量(Dual One-Way Ranging,DOWR)[1]的方法来实现。双向单程伪距测量提出于星间链路的测距及同步中,目前的文献普遍认为双向传输路径上的时延基本一致且方向相反,在实现同步的过程中可以互相抵消,因此在星间链路中利用DOWR时不用考虑信号传输路径上的误差因素,精度可达0.3 ns[2]。但当利用DOWR进行地面分布式节点的时间同步时,由于信号在地面传输时其多路径时延影响较大,无法简单地认为时延一致而互相抵消。而现有的文献仅在机动的条件下进行过相关研究[3],尚未有文献考虑过静止状态下双向传输路径上的时延不一致问题。为了解决这个问题,提出将双向单程伪距测量和卫星授时数据结合起来,用双向单程伪距测量平滑卫星授时数据。
1 双向单程伪距测量
利用双向单程伪距测量的两个异地节点间通过相互发送测距信号和时钟信号来解算距离值和钟差值,然后再通过通信链路交换数据。由于测距信号所经历的发射路径与接收路径基本一致且方向相反,因此可以最大限度地消除路径传播误差。该方法的主要实现过程:首先,节点A生成测距信号并将该信号发送给节点B,待节点B接收该测距信号后,对其进行捕获和跟踪处理,然后进行伪距值的提取以及节点A到节点B的钟差与距离的计算;节点B将测距信号发送给节点A,节点A对接收的节点B测距信号进行基带信号处理操作以得到两节点间的钟差及距离[4]。
1.1 基本原理
双向单程伪距测量的两个节点之间的工作原理及顺序关系如图1所示[5]。
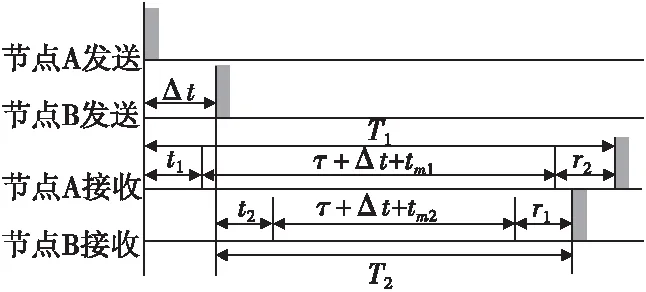
图1 双向单程伪距测量工作原理Fig.1 Working principle of dual one-way ranging measurement
节点A和节点B根据自己的时钟发送传输信号,对于节点A来说,通过捕获跟踪从B节点发出的测距信号的传输时间τ1,节点B的发送时延t2,节点A的接收时延r1和两节点之间的钟差Δt,加上信号从B到A传输过程中的多路径时延tm1,可以测得信号传输时延T1:
T1=t2+τ1+r1+Δt+tm1
(1)
同理可得信号从节点A到节点B的传输时延T2:
T2=t1+τ2+r2-Δt+tm2
(2)
假设传输路径高度对称,即认为双向传输路径上的时延是一致的,此时,τ1=τ2=t,因此节点A和节点B之间真实的传输时延和钟差为:

(3)

(4)
令
t1+r2=t12,t2+r1=t21
(5)
则
(6)
(7)
式中,T1和T2作为测量值,能够从节点A和节点B的码跟踪环中获得,t12和t21能够通过对设备进行时延标校获得,这些数据可以嵌入到传输帧数据区内,通过传输链路发送给对方。因此,只要求得tm1、tm2的值,即可通过双向单程伪距测量的方法测得两节点之间的距离和钟差。对于本文来说,只要获取tm1-tm2的值就可以利用DOWR实现节点间钟差数据的测量。
1.2 工作体制
双向测距采取分时工作体制,在可视的两节点间建立多条点对点的单频时分双向通信链路,为两节点实现时间同步提供数据交换通道。在双向测量过程中信号不是同时发送的,而是按照一定的时序将两个单向测距组合起来的[6]。其测量机制如图2所示。

图2 双向测量时序机制示意图Fig.2 Schematic diagram of bidirectional measurement timing mechanism
通常,两节点间需要互传多轮信号才可以实现同步,而每轮互传信号所包含的信息并不相同。为了更清楚地显示节点间的测量时序关系,上图将两节点间的多次双向测距简化为一次。对于A节点来说,在0~t1时间内与B节点建立通信链路,在t1~t2间与C节点建立通信链路,同时B节点可与其它节点建立通信链路。当A节点将信息发送给B节点时,B节点完成数据帧的信息提取,从而完成单向测量。之后双方交换,由A节点接收B节点发送的信息并提取,这样在一个循环中两个节点就实现了双向测距和时间同步,单个节点也可以利用两个节点的数据进行钟差解算。实际上,利用DOWR实现时间同步的精度虽高,但其多路径时延差无法获得,而卫星授时可以辅助测量多路径时延差,因此可以将两种方法结合起来完成节点间的时间同步。
2 DOWR平滑授时数据
在实际应用场景中,利用卫星进行授时虽然精度不高,但其授时接收机设备成本低,结构简单,体积小,可以方便地安装在各节点处来获取各节点的钟差数据。因此,如果将DOWR与卫星授时数据进行融合,则能够大大提高系统的同步精度。基于这种思路,本文提出用卫星授时数据作为辅助来完成多路径时延差的初步获取,从而进行授时的初同步。在完成初同步后,用DOWR对卫星授时数据进行多次平滑,即可以完成系统的精同步过程。整个过程总共分为三个阶段:测距帧阶段、数据帧阶段以及数据融合阶段。接下来分别对这三个阶段进行详细分析。
2.1 测距帧阶段
节点B根据自己的时钟发送并接收测距信号,其中伪随机码信号由伪随机码产生器生成,码率为8.184 Mchip/s,经过DAC转化成模拟信号,信号发射器将信号进行调制并发送到发射天线,节点A的接收天线接收到信号后将它下变频到中频,然后中频信号通过ADC变成数字信号,在跟踪环中进行处理。
节点A接收后通过码跟踪环获取信号从节点B发出到节点A所经历的时延T1,并向节点B发送测距信号,同理节点B可获取信号传输时延T2。此时,测距帧结束。
2.2 数据帧阶段
下一个周期作为数据通信周期。节点A/B根据自己的卫星授时接收机,解算出节点与系统时的钟差。节点A向节点B发送自己的授时数据ΔtA、设备的发射时延t1和接收时延r1以及在测距帧阶段获取的传输时延T1,B接收到后在本地即可根据双向单程伪距测量所得的双向测量方程,在用两地授时接收机解算出的钟差代替两地实际钟差,即ΔtA-ΔtB=Δt的基础上,解算出两点间一次测量的多路径时延差tm1-tm2。
同样,B节点向A节点发送自己的时钟数据ΔtB、设备的发射时延t2和接收时延r2以及在测距帧阶段获取的传输时延T2,A节点接收后同样可以根据测量方程解算出一样的tm1-tm2。令ΔtA-ΔtB=Δt,代入式(7)中得:
tm1-tm2=T1-T2+t12-t21-2·(ΔtA-ΔtB)
(8)
2.3 数据融合阶段
由于卫星授时接收机解算授时信息时存在误差,节点的授时接收机每次解算的授时数据ΔtAk、ΔtBk都是不同的。因此,当授时信息在两节点间进行传递时,两点间的共视钟差ΔtAk-ΔtBk=ΔtABk也并不相同。共视是指两个地面站在同一时间对同一颗卫星进行观测,分别测得地面站与卫星的钟差,通过比较两个地面站的测量结果即可得两个地面站间的钟差。共视可以完全抵消星钟误差,基于伪码测量的共视接收机可保证两站测量精度达到10 ns,可以认为ΔtAB的精度约等于卫星共视精度εα[7]。另外,节点间互相发送信号时,由于码跟踪环同样受到噪声的干扰,从而节点从码跟踪中获取的信号传输时延T1k、T2k也存在差异。设输入噪声为带限零均值高斯白噪声,其双边功率谱密度为N0/2,噪声引入的跟踪抖动为:
(9)

ΔtAB=Δt+εα
(10)

(11)
式中,Δt为两节点的钟差真值。由式(10)、式(11)可得:
(12)
在不考虑误差项的影响下,读写器对接收信号连续测量n次,可得测量方程:

(13)
则
(14)
将平滑后的多路径时延差值代入式(7)中得

(15)
对于式(15),考虑平滑后的误差σ与εα、εβ之间的关系,由于εβ2≪εα2,根据误差传递定理[10]可得,
(16)

另外,考虑到式(15)必须事先存储n次测量数据才能得到结果,而实际应用中需要实时得到测量信息,因此给出其实时表达形式及算法的流程图。

(T1n-T2n+t12-t21-2ΔtABn)-
(17)


图3 算法流程图Fig.3 Algorithm flow chart
2.4 具体实现过程
上述算法流程适用于平滑次数n≥2的情况,实际上平滑次数也是数据通信阶段信号传输的轮数,平滑次数n=1时,在两个节点间只传输了一轮卫星授时数据,此时相当于进行了一次卫星共视,只有当平滑次数n≥2时才起到了平滑效果。本节将在平滑次数n≥2的情况下对信号处理过程作详细分析。
1)测距阶段,A/B节点互相发送信号,根据码跟踪环获取T11、T21;
2)数据通信阶段
①第一轮数据通信阶段,两节点分别传输设备发射时延t、接收时延r、第一轮中获取的T11、T21以及导航授时接收机解算出的各节点与系统时的钟差ΔtA1、ΔtB1,同时从码跟踪环中获取信号在该轮通信时信号的传输时延T12、T22;
②第二轮数据通信阶段,发送T12、T22以及两个节点第二次解算的卫星授时数据ΔtA2、ΔtB2,继续从码跟踪环中获取信号在该轮通信时信号的传输时延T13、T23;
③第三轮数据通信阶段,发送T13、T23以及两个节点第三次解算的卫星授时数据ΔtA3、ΔtB3,继续从码跟踪环中获取信号在该轮通信时信号的传输时延T14、T24;
……
第n轮数据通信阶段,发送T1n、T2n以及两个节点第n次解算的卫星授时数据ΔtAn、ΔtBn,继续从码跟踪环中获取信号在该轮通信时信号的传输时延T1n+1、T2n+1。
3)数据融合阶段

(18)

3 仿真验证
3.1 平滑算法的有效性分析
为了验证平滑算法的有效性,本文根据式(18)仿真了平滑次数与钟差误差之间的关系。仿真条件为授时误差10 ns,由于式(18)中钟差误差与设备收发时延无关,因此只考虑T1、T2的测量误差0.49 ns。根据图3的算法流程,在实验中对同一组数据进行250次平滑,分别计算出每次平滑的钟差误差,并对其进行拟合处理,得到平滑次数与钟差误差的关系如图4所示[11]。

图4 平滑次数与钟差误差的关系Fig.4 Relationship between smoothing times and clock error
从图4中可知,随着平滑次数的增加,钟差误差也随之减小。应当注意的是,平滑次数不仅影响着平滑效果,它同时还决定了平滑时间。越大的平滑次数在达到较高精度的同时,所耗费的平滑时间也会越久,即越无法满足系统的实时性要求[12]。对于本系统,系统选取的码速率为8.184 Mchip/s,码长为1023 chip,每个伪码周期取得一次测量值,则相邻的两次测量间隔为1023/8.184 M=0.125 ms。n次平滑需要耗时n·0.125 ms,因此应该合理的选取n值以同时满足系统实时性与精度的要求。
3.2 平滑算法钟差误差分析
为了对平滑前后的钟差误差进行比较,本实验分别进行了n取不同值时平滑前后的钟差误差对比,并得出不同平滑次数下的均方根误差如图5所示,(a)、(b)、(c)、(d)分别是平滑次数为10,50,100,150时的平滑前后钟差误差比较图。

图5 平滑前后的钟差误差比较图Fig.5 Comparison of clock error before and after smoothing
从图5中可以看出,随着平滑次数的增加,钟差误差逐渐减小,当n取值不同时,平滑前后的钟差均方根误差如表1所示。
综上可得,平滑次数越多,钟差测量精度就越高,当平滑次数达到100时,钟差误差(均方根)已经得到了明显的改善。考虑到平滑次数的选取必须在系统精度与实时性间进行权衡,由图4和表1可知,在100次平滑之后,钟差精度改善不大。因此综合考虑,选取平滑次数为100次。100次平滑需要耗时0.125 ms×100=12.5 ms,可以同时满足系统实时性与精度的要求。

表1 钟差测量的均方根误差前后对比
4 结论

