复杂场景下的ETC系统路径损耗研究*
2019-08-14何怡刚张超群佘培亮苏蓓蕾
何怡刚, 张超群, 李 兵, 佘培亮, 苏蓓蕾, 许 越
(合肥工业大学 电气与自动化工程学院,安徽 合肥 230009)
0 引 言
无源超高频(ultra high frequency,UHF)的射频识别(radio frequency identification,RFID)技术是一种基于无线射频通信方式的自动识别技术,具有识别距离远、功耗低、操作快等特点,在智能物流领域应用广泛[1,2]。通过RFID技术,ETC系统中的车载单元(on-board unit,OBU)和路侧单元(rood side unit,RSU)可实现车辆的自动识别和相关数据交换,从而实现电子不停车收费(electronic toll collection,ETC),大大提高收费效率[3,4]。考虑到复杂场景下的诸多因素都会影响电磁波在信道中的传播效率,因此,有必要考虑信道传播的路径损耗和实际应用场景下的多径传播。
文献[5]首次提出了移动散射体下的V2V无线信道传播模型,并且计算得到模型的自相关函数和多普勒功率谱密度等。文献[6]分析了无线携能通信在无线传感器网络中应用,验证了方法能有效提高无线通信传播的效率。文献[7]主要针对不同频率的电磁波穿透车辆时造成的路径损耗进行了研究,但未考虑反射路径损耗和自由空间损耗等影响因素。文献[8]给出了无源超高频RFID系统在实际应用中的链路预算模型,但方法的精度不足以满足实际应用需求。文献[9]考虑不同车辆的外形差异对路径传播的影响,提出了一种基于两径模型的ETC系统信道传播损耗评估方法,但只考虑了单车道并且没有前车干扰的情况。文献[10]对多标签环境下RFID的前后向链路进行了研究,对于确定阅读器的位置以及提高标签的读取效率有着重要意义。文献[11]提出一种基于光线跟踪和射线均匀理论(uniform theory of diffraction,UTD)的ETC系统传播损耗模型,但没有考虑车道环境的复杂性。文献[12]提出一种基于场景几何特征的标签识别范围预测方法,对ETC多车道情形进行了分析,但对于旁道车辆与阅读器天线及被识别车辆的距离以及不同旁道车辆造成的损耗差异没有做出详细的分析。
考虑在多车道情形下,旁道大型车辆与阅读器天线及被识别车辆的距离等都会对信道传播造成不同程度的干扰,因此,通过分析多径射线波的几何特征,提出了一种ETC系统的信道传播损耗模型。
1 ETC系统场景与多径传播分析
目前,ETC系统的应用场景并不复杂,其与手动收费系统共存于国内外的收费广场中。为确保所有类型带有OBU的车辆均能顺利通过,RSU应具有足够大的通信范围,而在多车道情形下,RSU与被识别车辆之间的通信会受到旁道车辆的干扰。将小轿车作为被识别车辆,分析旁道车辆以及前方地面或引擎盖对系统信道传播的影响。为便于分析,对ETC场景做出几点说明:1)假设小轿车所在车道前方无其他车辆,即不考虑前车的影响;2)由于车辆以较低速度(10 km/h)通过收费广场,因此不考虑车辆移动引起的路径损耗;3)不考虑由于特殊天气造成的路径损耗。
典型ETC系统示意图如图1所示。将阅读器天线作为参考点,被识别车辆与阅读器天线之间的直射分量毫无遮挡,为主要传播分量。由于两侧车辆对被识别车辆造成的影响情况相同,因此只需对一侧大型车辆进行分析。旁道的大型车辆与阅读器天线以及被识别车辆的距离分别为l和l1,被识别车辆进入可识别区域时,会接收到阅读器天线发出的直射信号、前方地面或引擎盖的反射信号以及旁道大型车辆的反射信号与绕射信号。

图1 ETC场景示意
2 ETC系统信道传播损耗评估方法
2.1 ETC系统传播机制
2.1.1 地面或引擎盖的反射路径
假设RSU的高度为H,OBU的高度为h,将RSU与被识别车辆的水平距离设为d,随着距离d的变化,反射路径会有所不同。RSU与OBU的直接距离为
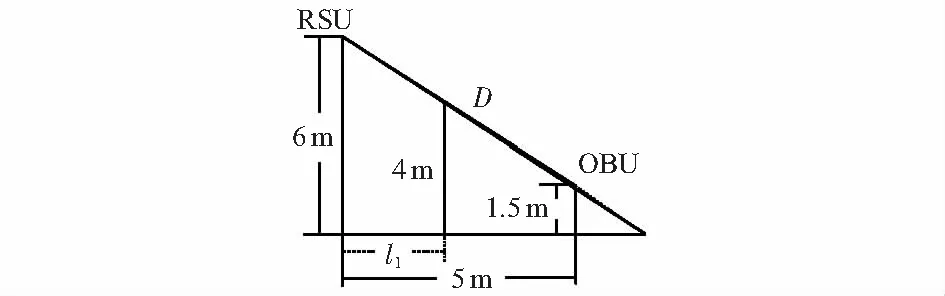
如图2所示,将地面或引擎盖的一次反射路径距离设为
当0 当d1 当d2 根据三角形相似原理可以得出 图2 小轿车反射路径 参考实际情况确定ETC场景的几何参数,阅读器天线高度H为6 m,被识别车辆高度h为1.5 m,小轿车引擎盖高度h1为0.75 m,车头与标签距离L0为1 m,天线可识别距离d3为15 m。 2.1.2 旁道车辆的反射路径 在多车道情形下,旁道车辆与被识别车辆的距离较近,所以旁道车辆引起的反射路径会对系统的信道传播产生影响。文献[13]中提出ETC系统路径损耗的影响因素主要是周围的一次反射路径,所以接下来讨论旁道车辆的一次反射几何关系。 如图3所示,将阅读器天线坐标设置为R(0,0,H),被识别车辆O坐标为(0,d+L0,h),旁道车辆与被识别车辆的水平距离为l。 图3 旁道车辆的一次反射几何关系 因此x=-l为旁道车辆对被识别车辆的一次反射面,且R关于反射面的镜像坐标为R1(-2l,0,H),旁道车辆的一次反射路径距离为 由此可得 随着距离l的增大,旁道车辆引起的一次反射路径影响越来越小,当距离到达临界值l0=5 m时,旁道车辆的反射路径可以忽略。 2.1.3 旁道车辆的绕射路径 假设被识别车辆与阅读器天线的距离d=4 m,分析旁道车辆引起的一次绕射路径,绕射点与阅读器天线的水平距离为l1,与被识别车辆的水平距离为l2,有以下关系 l1+l2=d+L0=5 m (9) 假设旁道车辆是高度为4 m的货车,一次绕射路径可以看作单刃峰绕射,因此绕射常数[13]为 式中 ΔH为绕射点的等效高度,即RSU与OBU的连线与货车最高点D的高度差。 如图4所示,绕射点D的高度为4 m,由几何分析可得 ΔH=2-0.9l1 (11) 当ΔH=0时,l1=20/9 m,因此:当绕射点0 图4 等效高度示意 ETC系统路径损耗可表示为 L=PO/PR (13) 式中L为路径损耗,P0为OBU接收功率,PR为RSU发射功率。 在设定的场景中,ETC系统的路径损耗包括自由空间损耗、一次反射路径损耗、一次绕射路径损耗以及汽车前挡风玻璃的穿透损耗等,取玻璃的穿透损耗Lα=2.7 dB,一次绕射路径损耗已由式(12)给出,其余路径损耗的具体分析如下: 自由空间损耗 式中λ为波长,k为波数,dd为直射路径R-O的传输距离。 地面或引擎盖的反射路径损耗 式中dr为反射路径R-A-O的传输距离,Γr1和Γr2分别为地面和引擎盖的反射系数。 旁道车辆的反射路径损耗 式中dl为反射路径R-P-O的传输距离,Γr3和Γr4分别为旁道大型车辆即客车或货车侧身的反射系数。 反射系数由参考文献[12]可得 式中εr为反射面相对介电常数,α为入射波与反射面之间的夹角。 2.3.1 OBU与RSU距离对路径损耗的影响 首先分析被识别车辆前方的路径损耗,即自由空间损耗和地面或引擎盖引起的一次反射路径损耗。取车辆的穿透损耗为23.8 dB,假定旁道车辆与阅读器天线的水平距离l1=3 m,与被识别车辆的水平距离l=2 m,此时ETC系统路径损耗只跟RSU和OBU的距离有关,因此可表示为 (18) 2.3.2 旁道车辆的位置对路径损耗的影响 分析旁道车辆对被识别车辆造成的一次反射路径损耗和一次绕射路径损耗,假定被识别车辆与阅读器天线的水平距离d=4 m,此时可以确定自由空间损耗和由地面引起的一次反射路径损耗,ETC系统路径损耗随旁道车辆的位置变化而变化,因此可表示为 (19) 根据上述分析得出在ETC系统信道传播中,引起路径损耗变化的因素主要是RSU与OBU的距离d、旁道车辆与RSU的距离l1、旁道车辆与OBU的距离l。通过给出的ETC系统路径损耗模型进行仿真模拟,分析3个变量对系统的影响。 图5(a)是当旁道车辆的坐标位置发生变化时,ETC系统路径损耗变化的三维图。图中可以看出旁道车辆与OBU的距离l的变化没有引起ETC系统路径损耗的变化。图5(b)是当RSU与OBU的水平距离d以及临道车辆与RSU的水平距离l1同时变化时,ETC系统路径损耗变化的三维图。图中可以看出:随着距离d的增大,地面的反射损耗呈线性增大;而随着距离l1的变化,绕射系数发生变化,从而引起系统绕射损耗的大幅度变化。 图5 ETC系统路径损耗变化的三维图 确定RSU与OBU的水平距离d=4 m,旁道车辆与OBU的水平距离l取不同值时,ETC系统路径损耗随旁道车辆与RSU的水平距离变化的评估预测如图6(a)所示。观察可知,距离l取不同值时,三条曲线几乎重叠,所以图形的波动主要受系统的绕射损耗影响。当0 L0=20lg(0.5e0.45v)和L0=20lg(0.5+0.62v) 对其进行求导,前者导数小于后者导数,所以在点l1=20/9m处图形不平滑。 旁道车辆与RSU的水平距离l1取不同值时,ETC系统路径损耗随旁道车辆与OBU的水平距离变化的评估预测如图6(b)所示。图中可以看出当l变化时,ETC系统路径损耗变化非常平缓,基本控制在1 dB内,结合图6(a)可以说明旁道车辆引起的反射路径对系统路径损耗的影响可以忽略。这是因为旁道车辆与OBU的水平距离l不会使反射路径R-P-O引起明显变化。实验中距离l1的取值每增加0.5 m,系统的路径损耗分别增加了4 dB和9 dB,结合图6(a)分析,当距离2 图6 距离l和l1变化对系统的影响 旁道车辆位于不同位置时,ETC系统路径损耗随RSU与OBU之间距离变化的评估预测如图7所示。结合以上分析可知,l=2 m,l1=3 m和l=3 m,l1=3 m相对应的两条曲线重叠,说明当l1不变,l取不同值时,路径损耗没有明显变化;而当l一定,l1取不同值时,路径损耗变化幅度明显。根据图7的变化趋势可以得出,RSU与OBU的水平距离d每增加1 m,ETC系统路径损耗增加约1 dB;旁道车辆与RSU的水平距离l1增加1 m时,ETC系统路径损耗增加了9 dB,所以被识别车辆前方的路径损耗和旁道车辆引起的绕射路径损耗是影响ETC系统路径损耗的主要因素。 图7 距离l和l1同时变化对系统的影响 对于本文特定场景的仿真结果可以得出:旁道车辆与RSU的距离为0.6 m且被识别车辆与RSU的距离越小时,系统的路径损耗越小。由于该评估方法忽略了前方车辆的影响,下一步将研究前方车辆和旁道车辆对系统的综合影响。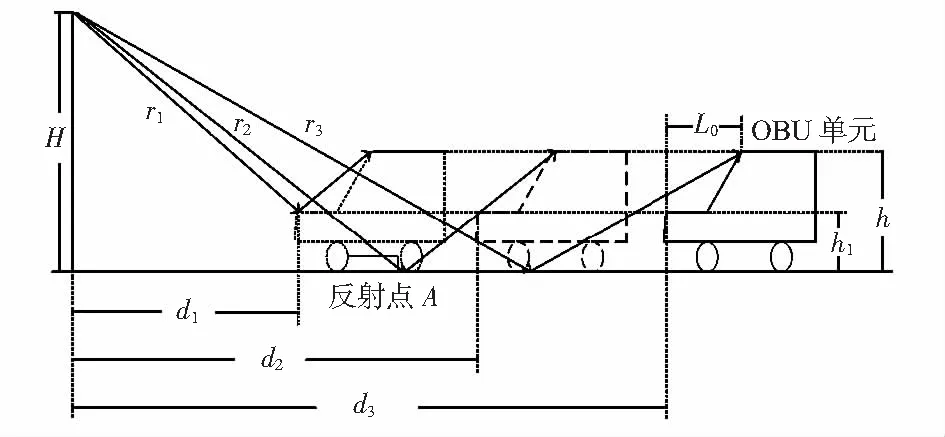

2.2 电磁波传播路径损耗
2.3 ETC系统的电磁波传播路径损耗模型
3 实验研究



4 结 论
