基于改进格子气模型的城市轨道交通行人仿真研究★
2019-08-08孙惠芳
孙惠芳 杨 婷
(1.中山火炬职业技术学院实训中心,广东 中山 528437; 2.广东白云学院管理工程学院,广东 广州 510450)
0 引言
行人流仿真模型可分为两类:连续型和离散型。格子气模型是一种元胞自动机模型,属于离散型仿真模型,具有模型简单、容易编程、易于计算等优点。格子气行人流模型最早由Masakuni Muramatsu等提出,用来研究双向行人流的阻塞相变[1]。T Nagatani等(2000)针对行人从众行为改进了模型[2]。随后不少学者通过改进或修正,提出了各种格子行人仿真模型,并用其来研究不同条件、不同环境的行人流特征。Li等(2012)人[3]针对视野范围同向行人的跟随影响和反向行人的避让影响改进了格子气模型。李明华等(2015)[4]在此基础上加入了对开阔区域移动偏好特性,对考虑视野范围影响的格子气模型的基本概率进行了修改,再现了行人的分层的自组织现象。Kuang,Li等[5-7]引入“意识强度”概念,基于行人跟随效应、速度差异和潜意识的影响修正了格子气模型,研究了双向行人流的分层现象,以及高密度行人流的相变分离现象。为了更形象的描述行人相互超越现象、侧身转弯等现象,不少学者研究提出了多格子模型。马新露等(2014)[8]基于对向行人干扰及本向行人由于速度差异造成的影响提出了多格子气模型,用来模拟信控人行横道行人过街运动。Ma等(2010)[9]提出了一种多格子气模型,通过观测表明该模型能良好的再现行人集体行为,如双向行人流混合运动时,同向行人流会聚集成行形成“车道”的现象。傅玲(2016)[10]提出了一种多格子气模型研究通道中转身侧行行为对双向行人流的影响。
借助计算机利用仿真模型模拟行人运动,研究城市轨道交通内行人运动特性和交通行为特性,对提高对向行人流走行效率、优化轨道交通通道设计有积极意义。
1 基于意识强度的格子气模型
城市轨道交通通道内的行人一般是从通道的一端向另一端运动,因此在模型中不设置后退。以自通道左侧向通道右侧行走的行人为例,它在运动过程中有三个方向可以选择:向上偏移、向下偏移和前进,当行人可选择的移动方向被占用,则该方向移动概率为0,行人在运动过程中可能遇到的冲突情况如图1所示,其中×表示通道边缘或被其他行人占用,行人根据冲突情况,进行移动选择,对应有方向选择及移动概率,可运动方向的移动概率之和恒等于1。
城市轨道交通车站通道的行人运动有以下特点:
1)行人运动有一定的随机性,但运动目的性较强:进站、换乘或出站。
2)行人走行偏好性。受对向行人干扰、交通法规及交通惯例的影响,行人会偏好靠一侧行走。
3)行人运动的跟随性。受站内空间限制,设施引导作用,行人大多会跟随前方的行人行走,超越行为有所降低。
基于这三种运动特点,根据以往研究基础,将各种影响行人运动选择的偏好性,用意识强度来描述[6-8],本文使用的格子气模型主要考虑三种意识强度:
1)行人移动的确定性意识强度。
以往的文献也把它称为漂移强度,模型中用D1表示。它是行人运动过程中朝一个方向运动的概率,反映行人运动的目的性,行人运动路径越明确,确定性意识强度越大。当行人运动前方没有被占用,其他方向可以选择时,行人选择前方的概率。
2)行人移动的右偏意识强度。
它反映在交通法规及交通惯例的影响下,行人习惯靠一方走行的偏好性,用D2表示。它表示当行人运动方向的左侧和右侧均不被占用时,选择向右侧偏移的概率。当其大于0.5时,行人偏好靠右行;其小于0.5时,行人偏好靠左行。
3)行人“跟车”意识强度。
它反映行人运动前方被比自己速度慢的本向行人占用时,行人选择减速跟在其后的概率,用D3表示。
基于以上几点改进后,每种冲突情况对应的移动概率如下:



情况4:
a.如果前方被对向行人占用,则:
Pt,x=0;Pt,y=1-D2;Pt,-y=D2。
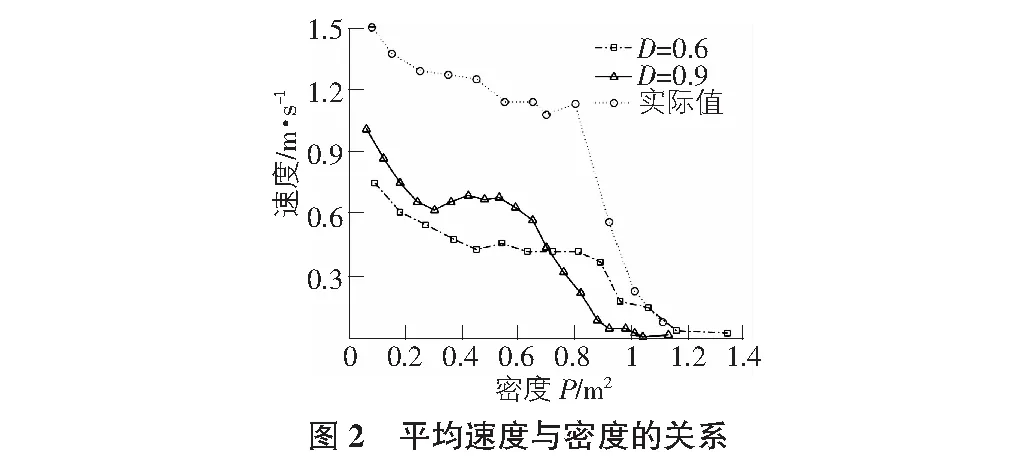
b.如果前方被本向行人占用,且V0 c.如果前方被本向行人占用,且V0>Vfront,则: 行人以概率D3减速,Pt,x=D3;Pt,y=(1-D2)(1-D3);Pt,-y=D2(1-D3)。 情况5:Pt,x=1;Pt,y=0;Pt,-y=0。 情况6: a.如果前方被对向行人占用,则: Pt,x=0;Pt,y=1;Pt,-y=0。 b.如果前方被本向行人占用,且V0 c.如果前方被本向行人占用,且V0>Vfront,则: 行人以概率D3减速,Pt,x=D3;Pt,y=1-D3;Pt,-y=0。 情况7: a.如果前方被对向行人占用,则: Pt,x=0;Pt,y=0;Pt,-y=1。 b.如果前方被本向行人占用,且V0 c.如果前方被本向行人占用,且V0>Vfront,则: 行人以概率D3减速,Pt,x=D3;Pt,y=0;Pt,-y=1-D3。 情况8: a.如果前方被对向行人占用,则: 行人被迫停止,Pt,x=0;Pt,y=0;Pt,-y=0。 b.如果前方被本向行人占用,且V0 Pt,x=1;Pt,y=0;Pt,-y=0。 c.如果前方被本向行人占用,且V0>Vfront,则: 行人减速,Pt,x=1;Pt,y=0;Pt,-y=0。 其中,Pt,x为t时刻该行人向前移动的概率;Pt,y为t时刻该行人向前进方向的左边移动的概率;Pt,-y为t时刻该行人向前进方向的右边移动的概率;V0为该行人t时刻的速度;Vfront为该行人移动前方的本向行人t时刻的速度。 通过使用c#进行编程构建了格子气网格空间,并将行人移动概率模型写入程序中,实现仿真系统,系统中参数及规则设置如下: 1)系统内行人生成模型,按照流量采用泊松分布概率模型进行随机生成。 2)根据笔者在广州地铁的实地调研统计结果,各种速度区间内的行人比例见表1。为了仿真结果更接近实际情况,在仿真系统中设置7种速度行人,其步速参数分别为:0.8 m/s,1.0 m/s,1.2 m/s,1.4 m/s,1.6 m/s,1.8 m/s,2.0 m/s,使用泊松分布生成行人时,各速度行人产生的概率分别为0.03,0.19,0.32,0.28,0.11,0.04,0.02。 表1 各种速度区间内的行人比例表 3)根据调查结果可知:城市轨道交通通道行人平均步频为1.91 step/s[11,12],仿真模型取行人步频都是2 step/s,系统更新时间以行人一步为单位时间,即0.5 s。 4)仿真系统中的网格尺寸单位为10 cm×10 cm,由于行人静止时所需空间为0.3 m2[13],则静止行人占用6×5个元胞。行人的步速差异主要体现在步幅上,即7种速度行人步幅分别为4,5, 6,7,8,9,10个格子。一个网格只能被一个行人占用,但是一个行人可以同时占用多个元胞格。 考虑到城市轨道交通行人特性,以及我国行人有偏好右行的特点,我们设置双向行人流相等,右偏意识强度D2=0.6,行人跟车意识强度D3=0.5,考虑到城市轨道交通系统内,出行目的不同时行人移动确定性不同,分别模拟了当确定性意识强度D1=0.6和0.9时,不同行人密度条件下,行人交通特性,得到平均速度、平均流量与密度的关系,并和调查实际值进行了对比(如图2,图3所示),结果显示行人平均速度随密度的增大而减小,当到达临界密度后,行人速度接近0,行人流量先随密度的增大而增大,当到达临界密度后,流量急剧下降。仿真系统模拟的行人流特性符合实际情况,并且当D1=0.9时,和实际情况更接近,验证了城市轨道交通中行人运动过程中目的性较强。行人速度和流量值对比实际值均偏小,是因为输入的仿真速度参数是根据调研速度数据设定的,在仿真系统中表现为期望速度,并且当加上确定性意识强度的漂移性后,行人的运动平均速度会下降。在一定密度范围内,行人移动确定性越大,行人平均速度越大,单位时间内通过的行人流量也较大;当超过一定值以后,行人确定性越大,速度反而越小,可能的原因是行人移动的确定性增加了对向行人的冲突作用。当行人确定性增大时,临界密度值会减小。 本文以城市轨道交通通道为研究的交通环境,以双向行人为研究的交通实体,基于城市轨道交通行人特性,根据考虑三种意识强度的格子气移动概率算法模型,构建了城市轨道交通行人仿真模型,并在C#编程软件中进行实现。仿真结果表明该模型能很好地再现行人运动特性,仿真结果显示行人平均速度随密度的增大而减小;行人流量先随密度的增大而增大,当超过临界密度以后,流量急剧下降;在一定密度范围内,行人移动确定性越大,行人平均速度越大,单位时间内通过的行人流量也较大;当超过一定值以后,行人确定性越大,速度反而越小;行人确定性增大时,临界密度值会减小。2 仿真及结果分析
2.1 仿真系统参数设定

2.2 仿真结果分析

3 结论