异步电动机串级调速系统控制策略的研究
2019-07-02唐国强
周 莉,唐国强
(安徽理工大学电气与信息工程学院,安徽 淮南 232001)
目前世界对能源利用问题越来越重视,对于在各个方面的节能需求也开始不断加大。我国是一个能源消耗大国[1]。各种发电机和泵类负载广泛使用在我国工业的各个领域,在全国的能量消耗中有很大的比例。而传统节能方法有很大一部分的能量消耗在电路调节和线路压降上。目前国内外主要对大型电机采用单闭环的控制。控制效果和节能方面不够理想。如果对这类负载采用新型的调速方法和控制策略,可以得到很好的节约能源的效果同时提高企业的经济效益[2]。
现在对这些电机的调速方法主要采用变频调速技术与串级调速技术。对比于前者,串级调速技术有许多的优点。例如串级调速技术在节约能源,谐波调节,装置大小的选择以及材料的消耗,使用环境要求上明显要好于变频技术。尤其当采用一些先进的控制策略加入串级调速系统中时,可以实现转子侧低压,小功率变流控制。是目前节电效率最高的调速。
考虑该方法的优势,本文针对大型电动机运行调速这个问题,对其理论进行分析。考虑到传统PID在实际中简单易实行,运行可靠。采用电流和转速双闭环控制,同时利用状态空间平均法建立系统的动态模型。在分析该方法原理的基础上,搭建了Matlab/Simulink仿真模型并进行仿真验证。对大型电机的运行安全和节能方面提供参考价值。
1 斩波串级调速系统原理
现代串级调速系统基本结构图如图1所示。
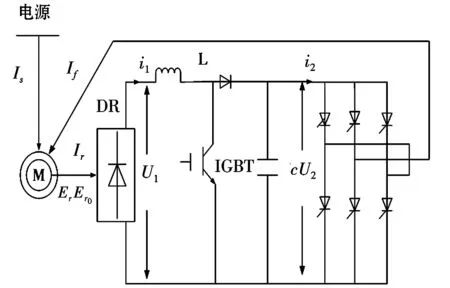
图1 串级调速系统结构图
现在串级调速系统中通常采用内反馈电机,以此来简化传统的调速系统结构,消去了传统结构中逆变变压器这一环节。同时在其整流电路之后加入了开关管器件IGBT,隔离二极管D和滤波电容C由这些构成升压斩波电路,右侧为由晶闸管组成的有源逆变电路[3-5]。
设转子电压为Ur1,则有
Er1=sEr0
(1)
式中:Er0为转子开路电压。
整流后的电压为
UDR=K1Er1=K1sEr0
(2)
K1为变流器电压系数,其值为2.34。
其中升压斩波器主要通过改变D,来调节电压U1。其中U1和U2的关系为
U1=U2(1-D)
(3)
由图可得
UDR=U1
(4)
联立上式得
K1sEr0=(1-D)U2
(5)
转子转速为
n=n1(1-s)
(6)
联立上式得
(7)
式中:n1,U2,K1和Er0都为定值,所以通过上式可以得出通过斩波器对占空比的控制来控制内反馈电动机的转速n[6]。
从上面的推导可以看出内反馈串级调速是借由改变占空比来调节转速的。和晶闸管的移相角无关。因此可以把角度设定在最小逆变角,通过这一手段可以减少整个系统的功率损耗。串级调速后面的有源逆变器将转差功率变回定子绕组上,并把整流器出来的直流电逆变为交流电,来送回电动机。为了避免两电动势同向串联,所以晶闸管的逆变电压极性和储能电容C的极性需要保持一致。
2 斩波串级调速系统的建模
该调速方法中的斩波器为采用PWM控制的。该斩波器的转子直流回路在不间断工作模式下,可以用两个线性非时变模型来替代,等效电路图如2所示。
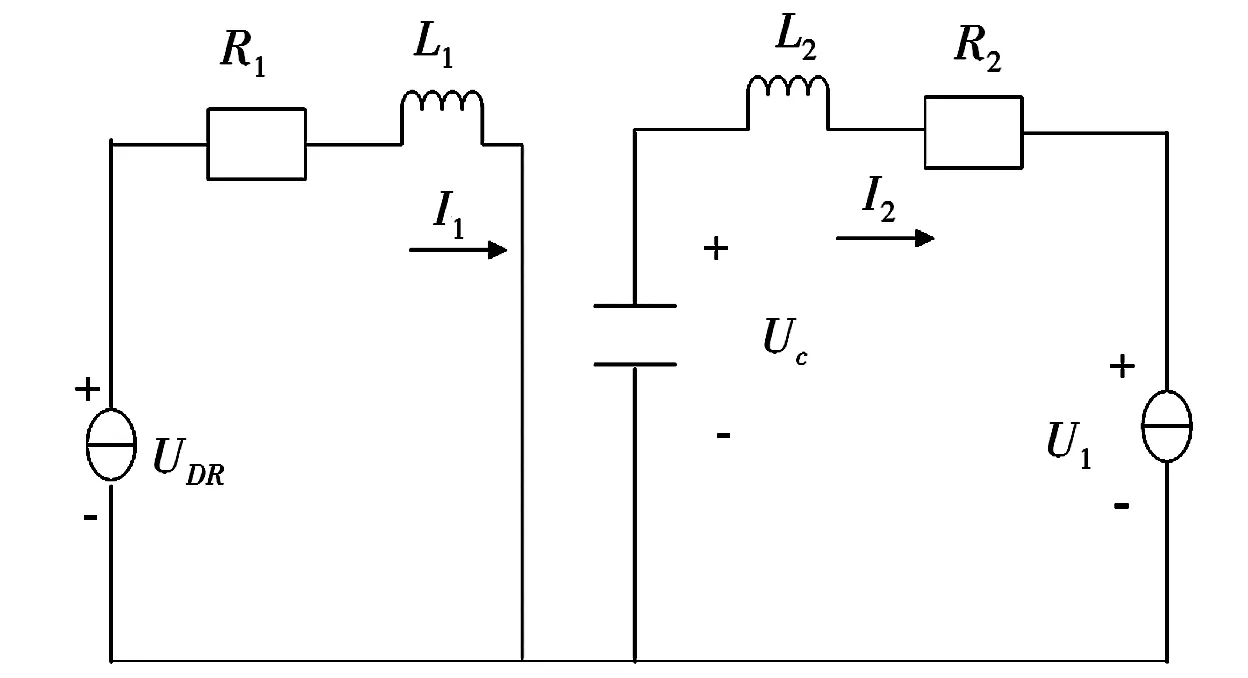
图2 IGBT关断时直流回路等效图
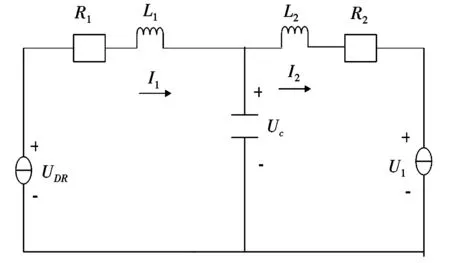
图3 IGBT开通时直流回路等效图
(1)当斩波器IGBT导通时,从图2可得以下式子成立
(8)
(9)
式中:R1,L1是整流电路中等效电阻和总电感,i1为回路中的整流电流。R2,L2为有源逆变电路中的等效电阻和总电感,i2为逆变电流。UDR为转子整流电压,UC为电容电压,U1为有源逆变电压。
(2)当斩波器IGBT关断时,则电路中关系式可以表示为
(10)
(11)
为了得到升压斩波器的动态数学模型,则通过状态空间平均法在一个周期内对i1取平均则有
(12)
其中:T表示为斩波器的一个周期,d(t)为占空比关于时间的函数。对上式子中的各个变量进行小信号扰动。其中电压UDR和电压UC相对稳点,可以近似的理解其小信号变化量为0[7]。
下面将公式中的控制变量和状态变量分为直流分量和交流小信号分量
(13)
(14)

(15)

将上式代入式(11)中并将得到的式子与(11)相减,消去稳态分量和二次项分量可得斩波器的交流小信号动态方程为
(16)
对式(16)拉氏变换后得到d到i的传递函数为
(17)
内反馈电机的电磁转矩Te为
Te=CMi1
(18)
式中:CM为调速系统中的转矩系数,i1为整流电流。
电机的拖动系统方程为
(19)
式中:TL为电动机的负载转矩,GD2为折算到电动机轴上的飞轮惯量[8]。
由上式可得调速系统的传递函数为
(20)
式中:iL为负载转矩对应的等效直流电流。
3 双闭环调速系统的设计
由于整流器和直流回路电阻上电压降低的影响,所以电动机在串级调速的时候的机械特性比一般工作时要软,因此单纯的开环控制仅限于调速准确率需求不高的情况。由于系统本身不能自行进行电气制动。为了提高静态调速特性和得到不错的动态调速性能。所以本系统使用双闭环控制调速系统[9-10]。
本系统采用电流环当内环,转速环作为外环的双闭环控制。利用转速环的输出限幅作用和电流环的负反馈从而得到良好的加速效果。通过转速负反馈实现闭环调速,其具体作用如下。
(1)转速调节器的作用
1)转速调节器起到主导作用,它可以使转速迅速的随设定电压Ugn的改变而改变,能够实现无静差调节。
2)针对负载发生变化的情况,可以起到抗干扰的作用。
3)转速调节器的输出限幅值决定了电机转子整流电流的上限[11-12]。
(2)电流调节器的作用
1)作为内环的调节器,在调节器外环运行中,它可以使电路牢牢随着它的设定电压Ugi的变化而变化。
2)当电网电压发生波动的情况时,可以有效的保护串级调速系统起到抗干扰的作用
3)在转速动态变化时,可以确保内反馈电机在工作中能够得到最大工作电流来加速串级调速系统的调速。
4)当内反馈电机过载时,可以限制转子电流的最大值,起到保护电机的作用,保障了装置的稳定工作[13-15]。
3.1 闭环调速系统传递函数的设计
1)触发逆变器环节的传递函数。逆变环节的输入是触发器的控制电压UDR,输出是空载逆变电动势U1,这是一个纯滞后环节。其电路传递函数为
(21)
式中:KS,TS分别为逆变器的放大倍数和时间常数。TS一般取定值0.001 7s。
2) 电流反馈电路的传递函数。由于检测时电流的信号常含有一些不可避免的交流分量,需要经过滤波器之后才能被系统所接受,同时也为阻止采集到的信号受到干扰而在反馈电路中加入滤波器,其传递函数为
(22)
式中:Kfi,Tfi分别为电流反馈系数和反馈滤波器的时间常数,一般取1~2秒。
(3)转速反馈电路的传递函数
在转速反馈电路中,也加入滤波器。其传递函数为
(23)
式中:Kfn,Tfn分别为转速反馈系数和反馈滤波器的时间常数。另外,相应的由于反馈回路的惯性作用,在电流设定和转速设定的通道中也加入相应的惯性环节。
将上述传递函数组成内反馈电动机双闭环调速系统结构图如图4所示。

图4 双闭环控制系统动态结构框图
4 仿真实验
在Matlab的simulink中搭建串级调速系统的模型,搭建的串级调速电机模型图5如上所示。其中将逆变器中的逆变角度固定在30°对其进行仿真。
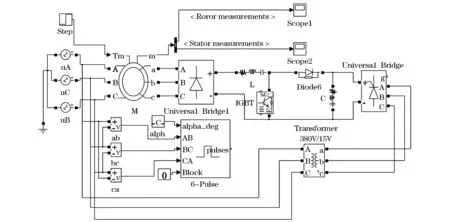
图5 串级调速系统电机模型图
通过在整流逆变环节引入上文的双闭环控制系统,对仿真电机进行实验得到电机在平稳运行时候的转速差和功率因数如图6~图7所示。从图6,图7可以看出电机在平稳运行时的转速与给定转速差值在一个比较小的范围内且功率因数由于逆变器的逆变角固定在30°,不会额外的损失功率。提高了相应的功率因数。可见该控制策略对电机的控制是有效的。

图6 电机平稳运行时的功率因数

图7 电机平稳运行时的给定转速差
5 结论
本文采用状态空间平均法对内反馈电机串级调速系统进行了分析以及建立了相应的动态模型,在Matlab中建立了其仿真模型。仿真结果说明了占空比与转速之间的关系。并且相对于其他调速系统,由于不需要传统中的逆变变压器,所以内反馈串级调速系统具有较低的成本,结构简单化等优点。同时证明了该控制策略具有一定的适用性,对一些大功率电机的调速控制策略研究具有良好的意义。