两级自适应谱线增强算法在弱信号检测中的性能分析
2019-04-11程乃平倪淑燕
杨 婧,程乃平,倪淑燕
(航天工程大学 电子与光学工程系, 北京 101416)
现代战争中,潜艇通常隐藏在距离海岸线几千公里、深几十米到几百米的海水之中,具有较大的突击威力,因此对水下潜艇进行远距离、大动态的精确通信检测识别,不仅可以辅助判断潜艇的作战意图,还可以作为实施干扰对抗的基础,有效支撑反潜作战。但潜艇信号强度的动态范围很大,潜艇潜得越深,离陆地越远,潜艇信号就越弱,有的信号强度甚至只有几百nV,对潜侦测比较困难。
信号检测常使用功率谱估计的方法[1],但复杂的电磁环境和海洋环境要求能够对弱信号进行有效的检测,因此提出自适应谱线增强算法对弱信号进行增强,该算法一方面能增强信号能量,另一方面可以降低背景噪声的起伏。自适应谱线增强(adaptive line-spectrum enhancement,ALE)[2]是一种自我学习和增强能力滤波的方法,它通过期望信号与输出信号的误差进行自我调整来实现信号增强滤波,广泛应用于信号检测、频谱估计等领域。针对强噪声背景下潜艇信号检测问题,引入自适应谱线增强算法,可以抑制宽带噪声、增强有用信号谱线,且无需噪声参考信号就可以检测出宽带信号。
本研究在原有的自适应谱线增强算法基础上进行了改进,提出了一种改进的基于两级自适应滤波的谱线增强算法:该算法一方面设计了串联两级自适应滤波,更好地滤除噪声、增强有用信号的强度;另一方面改进了自适应滤波器权系数更新公式,将算法中的e(n)x(n)改为e(n-1)x(n-1)使得权系数更新与y(n)计算同步进行,减小自适应时间,提高自适应收敛速度。将改进的算法应用于低信噪比、大动态范围下的潜艇弱信号检测中,可以有效滤除噪声、增强有用信号强度,有利于弱信号检测。
1 自适应谱线增强原理
自适应谱线增强的概念由Widrow于1975年提出,其原理如图1所示。其中,输入信号x(n)是窄带信号s(n)与宽带噪声v(n)的混合,利用窄带信号与其延迟信号的相关函数显著强于宽带噪声的相关函数的特征,选择合适的延时时间,将窄带信号s(n)与宽带噪声v(n)区分开来,此时自适应滤波器的输出y(n)为有用信号。
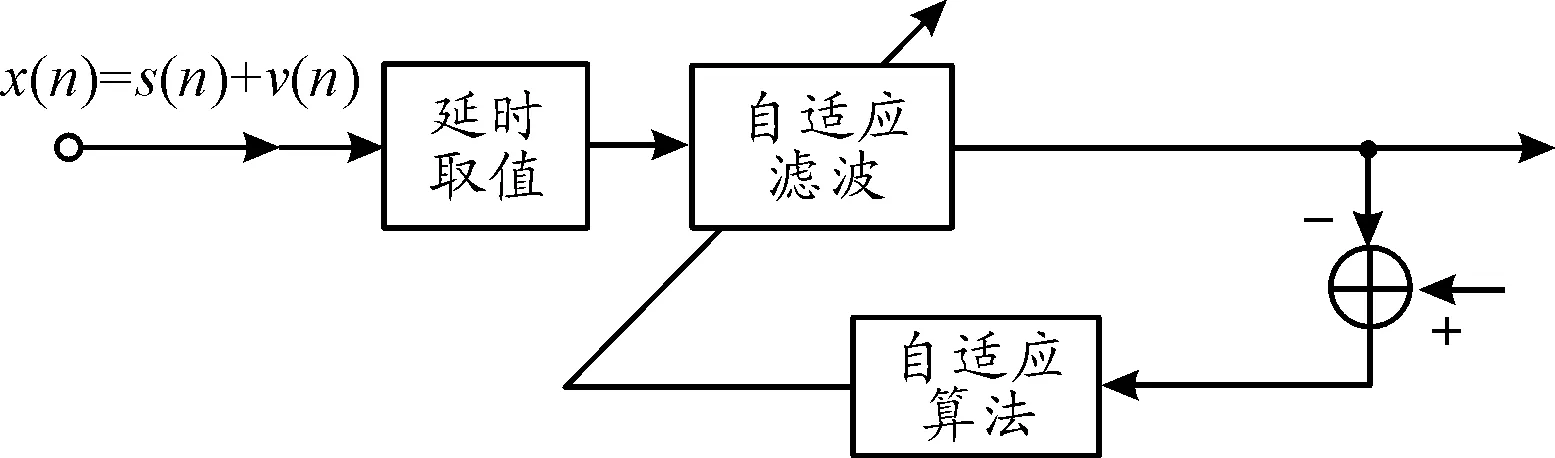
图1 自适应谱线增强原理
自适应谱线增强原理主要研究两个方面内容:一是滤波器结构,二是更新滤波器系数的自适应算法[3]。滤波过程是选择合适的滤波器计算输入信号的响应,并与期望信号对比得到估计误差信号;自适应过程是根据系统误差自动调整滤波器系数,从而使得系统估计误差最小。滤波器主要包括有限长单位冲激响应滤波器(Finite Impulse Response,FIR)和无线脉冲响应滤波器(Infinite Impulse Response,IIR)两种结构,其中FIR滤波器由于没有反馈回路,比较稳定,可以保证精确的线性相位,且其设计方式是线性的,结构简单,易于后期硬件实现,因此本文选用FIR滤波器。自适应算法中,经过多方改进、性能优良的最小均方算法(Least Mean Square,LMS)和递推最小二乘法算法(Recursive Least Square,RLS)使用较为普遍,其中LMS算法是通过调整滤波器的权系数使得滤波器的输出信号与期望信号之间的均方误差最小[4],由于它仅涉及乘法、加减法和迭代运算,不包含矩阵运算,计算简单,收敛性能好,易于后期硬件实现,因此本文选用LMS算法。
假设输入信号矢量为:x(n)=[x1(n),x2(n),…,xL(n)]T,滤波器权向量为:w=[w1,w2,…,wL]T,d(n)为期望信号,则基于LMS算法的自适应谱线增强算法的计算公式为:
1) 滤波器输出信号:
(1)
2) 误差信号:
e(n)=d(n)-y(n)=d(n)-wTx(n)
(2)
3) 权系数更新:
w(n+1)=w(n)+2ue(n)x(n)
(3)
式(1)、式(2)、式(3)为LMS算法的推导过程,L为滤波器阶数,u为自适应滤波器的步长因子。理论上来说,基于LMS算法的自适应滤波器的收敛速度和精度主要取决于滤波器阶数和步长因子。

(4)
失调M与步长因子关系为
(5)
可见步长因子u越大,自适应时间越短,但也会引起较大失调;u越小,自适应时间较长,失调越小,系统更稳定。因此在保证精度情况下,应尽量减少自适应时间。
2 基于两级自适应谱线增强的弱信号检测方法
2.1 自适应谱线增强算法改进
本研究以自适应谱线增强原理为基础,提出两点改进的方法,使得该算法能够更适用于远距离、大动态范围的潜艇弱信号检测要求,以期达到良好的检测效果。
第一,使用两级自适应滤波以达到更好的谱线增强效果。图2所示为基于LMS算法的两级自适应谱线增强算法结构[8-9]。输入信号x(n)经过第一级自适应滤波得到滤波输出信号y(n),再将y(n)作为第二级自适应滤波器的输入,得到两级滤波后的输出信号y1(n)。两级的期望信号相同。
第一级滤波器阶数选择100阶,步长因子μ=0.01;第二级滤波器阶数选择300阶,步长因子选用可调整的且使得LMS算法收敛的因子:μ=1/(10×L×(A2)),其中A为信号的幅度。第一级选用普通的LMS算法滤波器,阶数选择不是很高,步长因子选择可使得算法收敛的较大的步长因子;第二级滤波器阶数选择较高的300阶,步长因子也选择根据滤波器阶数和信号幅度变化的数,是在保证LMS算法收敛的同时比较优良的选择。
此时,第二级自适应谱线增强的输出信号、误差信号、权系数更新公式为:
1) 滤波器输出信号
(6)
2) 误差信号
e1(n)=d(n)-y1(n)
(7)
3) 权系数更新
w1(n+1)=w1(n)+2ue1(n)y1(n)
(8)
由公式可知,两级自适应谱线增强算法的误差信号更小,因此滤波性能更好,精度更高。但两级滤波意味着第一级滤波完毕才能进行第二级滤波,存在自适应时间延长,收敛速度减缓的问题,因此本文做了第二点改进。
第二,使得权系数的更新与滤波同步[5-7]。由权系数的更新公式:w(n+1)=w(n)+2ue(n)x(n)可以看出,若需更新当前权系数,需知当前时刻的e(n),即需要计算出输出信号和误差信号后才能更新权系数。然而FIR滤波器采用串行工作方式,若更新权系数不能与滤波同步进行,一个工作周期内需一半时间滤波(计算y(n)),一半时间更新权系数。比如滤波器完成某次滤波需要21个时钟周期,则前10个时钟周期滤波,后10个时钟周期更新权值,最后一个时钟周期为下次滤波做准备。
由于LMS算法的计算公式是严格按照上面的式(1)、式(2)、式(3)式的顺序执行的,因此,本文将算法中的e(n)x(n)改为e(n-1)x(n-1),用w(n+1)=w(n)+2ue(n-1)x(n-1)更新系数,不用知道当前n时刻输出信号y(n)和误差信号e(n),仅需上一时刻的误差信号e(n-1)和输入信号x(n-1),就可以使得计算n输出信号y(n)的同时,计算权系数的下一时刻值w(n+1),从而使得权系数更新与y(n)计算同步进行,滤波速度提高了约1倍,节约了自适应时间。

图2 改进的基于两级自适应滤波的谱线增强算法示意图
2.2 基于两级自适应谱线增强的弱信号检测
信号检测常用的方法是通过分析信号的功率谱密度随频率的变化,检测峰值来检测信号[10]。由信号的功率谱密度定义,结合已经过两级自适应谱线增强的信号y1(n),可得输出信号的功率谱密度为
(9)
其中ry1为输出信号y1(n)的自相关函数,Py1(ejω)为其功率谱密度。
但直接计算自相关函数比较复杂,因此可采用周期图法,先对信号y1(n)进行傅里叶变换再取幅值平方除以数据长度N,作为信号的功率谱估计
(10)

当数据长度N较大时,周期图法的方差性能不好,此时可采用改进的周期图法(Welch算法)通过对数据进行分段、加窗等方式提高信号功率谱谱分辨率,达到较好的方差特性
(11)
3 仿真分析
为了更加直观地分析两级自适应谱线增强算法及其在弱信号检测中的性能,现使用Matlab仿真软件,对低信噪比条件下的弱信号滤波、检测进行验证和分析。
3.1 两级自适应谱线增强算法的性能分析
为了对比分析改进的基于两级自适应滤波的谱线增强算法与普通自适应谱线增强算法的性能,本文通过Matlab仿真进行分析。设原始信号s(n)=Acos(2π×600.1n)+Acos(2π×400.1n),输入噪声为加性高斯白噪声,采样点数sample_N=2 000。LMS算法滤波器阶数N=300,步长因子μ=0.01。改进的两级自适应谱线增强算法第一级滤波器阶数N=100,步长因子μ=0.01;第二级滤波器阶数N=300,步长因子u=1/(10×L×(A2))。
对信噪比分别为5 dB、-5 dB、-10 dB条件下,仿真分析两种算法处理的信号的自适应滤波效果,如图3、图4、图5所示。
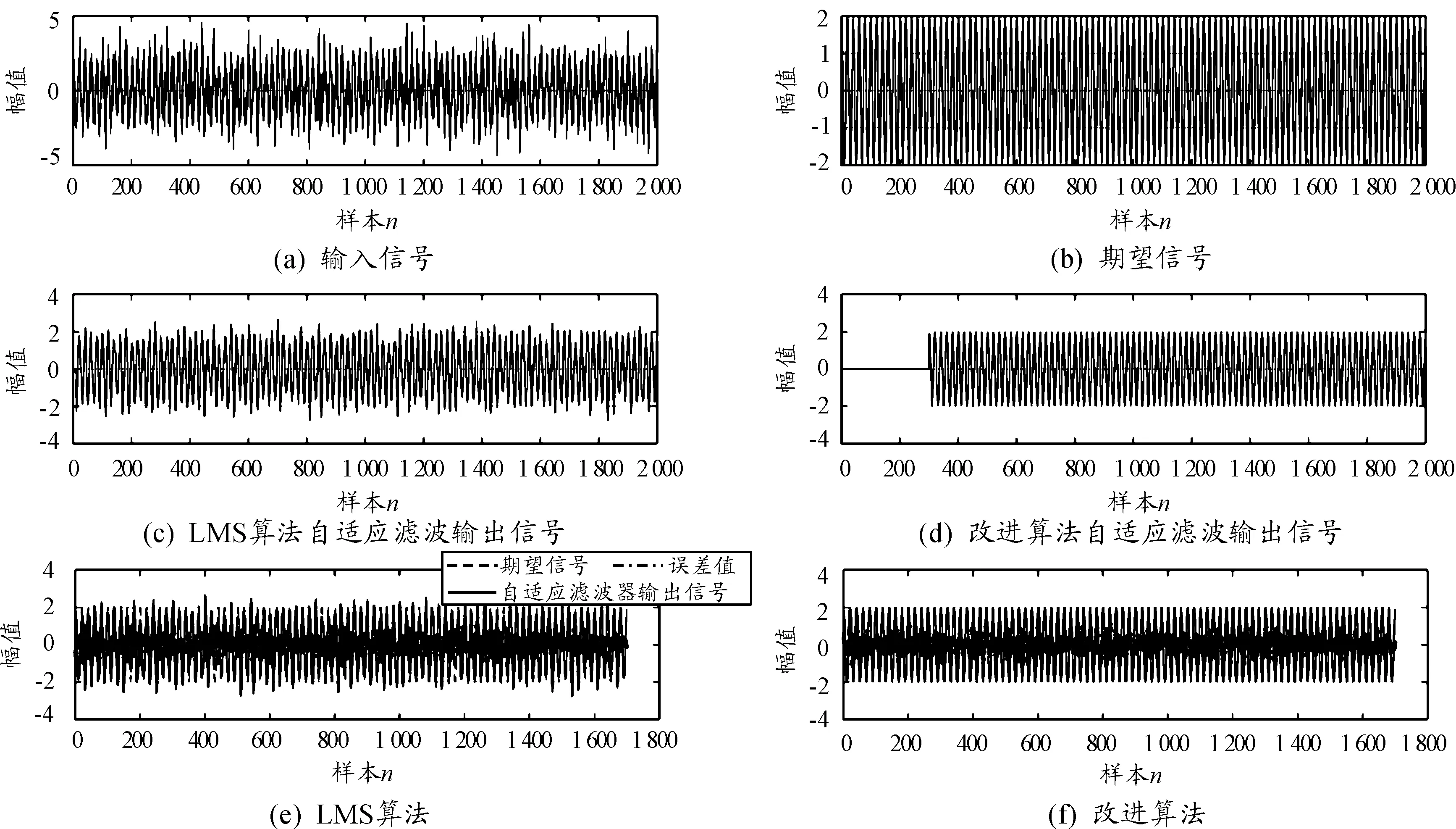
图3 SNR=5 dBLMS算法和改进算法滤波效果
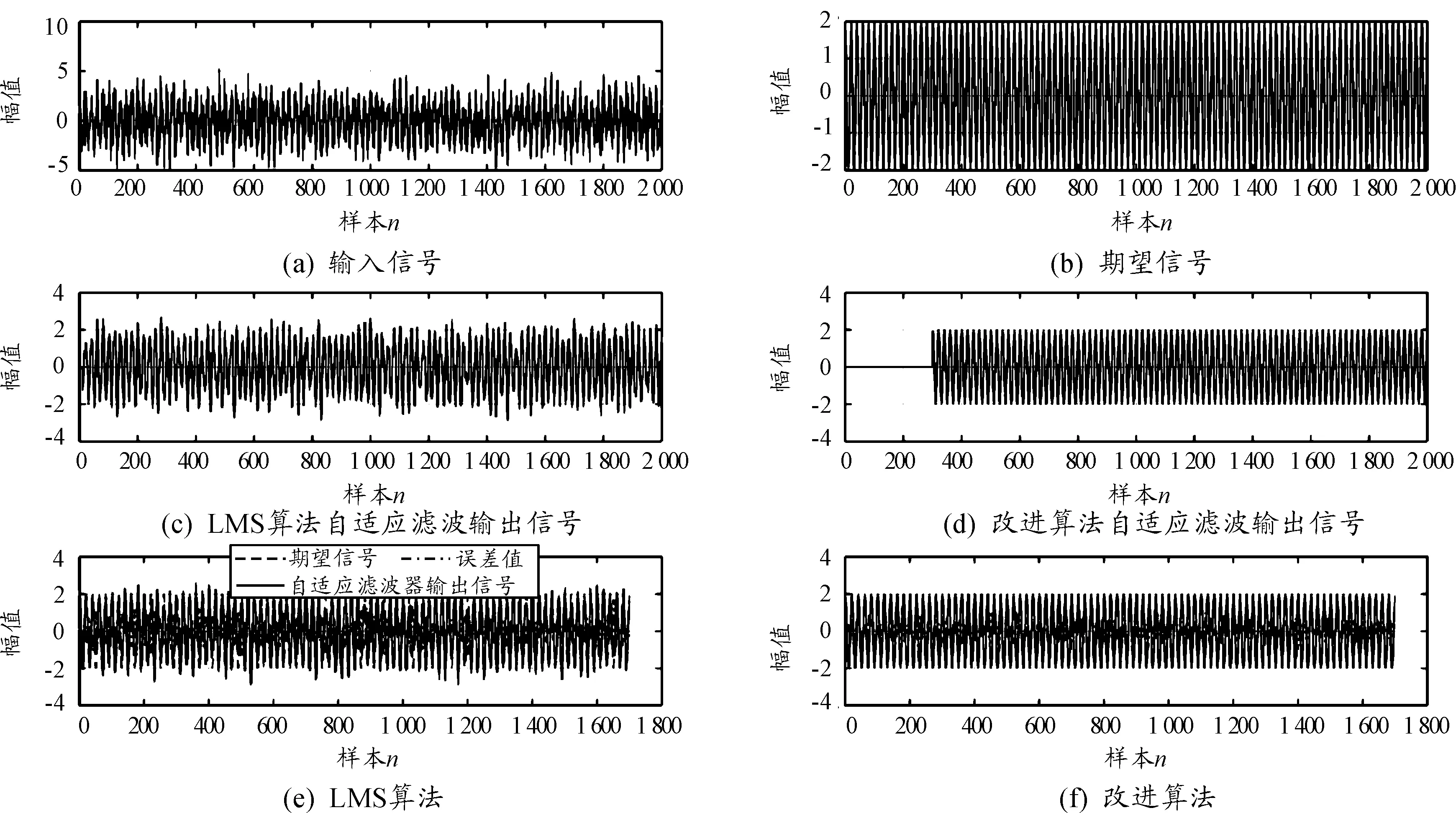
图4 SNR=-5 dB LMS算法和改进算法滤波效果

图5 SNR=-10 dB LMS算法和改进算法滤波效果
由图3、图4、图5可以看出:① 在相同的信号、噪声背景条件下,LMS算法滤波后的输出信号幅度明显参差不齐,曲线不如期望信号光滑,而经过改进算法滤波后的信号与期望信号波形最为逼近,且误差值相比较而言很小。② 随着信噪比的降低,改进算法滤波后的输出信号虽然略有波动,误差信号变化越来越明显,但比LMS算法滤波后信号更为稳定,与期望信号接近,且误差信号还是控制在一定范围内,没有超出输出信号幅度。
在保证精度情况下,应尽量减少自适应时间,即提高收敛速度。LMS算法的学习曲线用来描述均方误差曲线和迭代次数的关系,而均方误差的收敛速度可以判断算法的收敛速度,均方误差的起伏可以判断出算法滤波的稳定性。均方误差误差的计算公式为
E[e2(n)]=E[d2(n)-2d(n)*y(n)+y2(n)]
(12)
仿真信号和仿真条件与上面相同,图6比较了LMS算法和改进算法在信噪比为5 dB、-5 dB、-10 dB时的均方误差曲线。
由图6可以看出:① 改进算法的均方误差收敛速度比LMS算法稍微慢一点,但均方误差曲线收敛之后比较稳定;② 随着信噪比降低,两种算法的收敛速度都有所降低,稳定性也逐渐变差,LMS算法在-10 dB时几乎不收敛了,但改进算法的收敛速度和稳定性还是比较优良的。
综合以上分析可见,改进后的基于两级自适应滤波的谱线增强算法滤除噪声和滤除有用信号的性能明显优于普通自适应谱线增强算法。

图6 不同信噪比条件下LMS算法和改进算法均方误差曲线
3.2 基于两级自适应谱线增强算法的弱信号检测性能分析
经过上面的仿真验证分析,将改进的基于两级自适应滤波的谱线增强算法应用于弱信号检测中,对滤波后的输出信号进行功率谱估计,并与普通自适应谱线增强算法滤波输出信号的谱估计、输入信号的Welch算法功率谱估计进行对比分析。仿真信号与仿真条件保持不变,采样频率为3 000 Hz,信噪比分别为5 dB、-5 dB、-10 dB,仿真结果如图7所示。
由图7可以看出:① 普通自适应谱线增强和改进之后的算法的功率谱峰值更加明显。② Welch算法的噪声功率谱密度较大,普通自适应谱线增强算法次之,改进算法的最小,由此可见改进算法可以有效滤除信号中的噪声成分,提高信噪比。③ 改进算法相比较普通自适应谱线增强算法,功率谱方差性能更好,旁瓣较小且主峰更尖锐明显。④ 随着信噪比降低,3种方法的谱估计效果有所下降,旁瓣起伏变大,方差性能变差,但改进算法仍然能够明显检测出信号。
因此,改进算法通过对权系数更新环节的调整以及两级自适应滤波,对弱信号谱线进行了增强,有效抑制、滤除噪声,达到了较好的弱信号检测效果,算法性能更为优越。
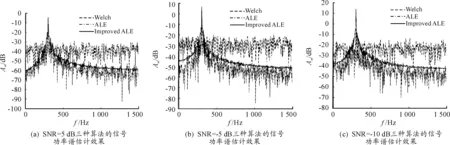
图7 不同信噪比条件下3种算法处理信号后的功率谱估计效果
4 结论
自适应谱线增强算法对信号谱线有明显增强效果,而改进之后的自适应谱线增强算法对背景噪声具有更好的抑制,能增强弱信号谱线,达到较好的弱信号检测效果,算法性能更为优越。
