运用灰色预测与模糊加权PID的反应釜温度控制
2019-03-19魏小宇
魏小宇,郑 晟
(太原理工大学 电气与动力工程学院, 太原 030024)
PID反应釜在工业中有着广泛的应用,尤其在化工、煤焦、医药等领域,是工业领域需求量最大的一类反应加热容器[1]。反应釜温度控制效果的提升和精度的提高有重要的意义。如何提高温度控制效果,满足多种系统的不同控制要求是一个重要的研究课题。
本文以反应釜为研究对象,该反应釜通过电加热完成加热,后期通过自然冷却实现降温。
由于控制的滞后性、非线性、时变性,反应釜是最难控制的温度系统之一。反应釜通过传热加热釜内物料,所以有很大的滞后性,而且传统的控制方式以PID算法为主,参数固定不变,前期响应速度慢,跟随性差,后期超调量大,这些都会使反应釜的温度难以按照设定曲线过渡。灰色预测通过对已有数据寻找规律来预测系统未来行为,很适用大滞后系统[2-5]。模糊控制不依赖精确的系统模型,仿照人的经验进行控制,对于非线性、时变系统控制效果很好,具有较强的鲁棒性和适应性[6-10]。加权PID加入设定值权重作用,可以有效调节跟随性和超调量,具有较好的稳定性[11-12]。综合考虑,本文提出一种运用灰色预测和模糊PID的控制方式,以西门子S7-1500和WINCC7.3构建监控系统,并通过试验验证该控制方式的有效性。
1 基于灰色预测模糊PID控制器设计
基于灰色预测与模糊PID的控制器结构如图1所示。在反馈回路中建立灰色预测模型预测下一时刻的温度,给控制器提供超前的信息便于控制器做出超前控制。模糊加权PID结合了模糊控制与加权PID的优点,该控制器根据预测模型提供的预测温度与设定值作比较,得出误差及误差变化率,然后根据模糊规则在线调整PID的比例系数和权重系数,使其具有良好的跟随性和适应性。图1为模糊加权PID控制器结构,其中:SP为设定温度;PV为过程温度;CV为加权PID输出。
1.1 反应釜温度灰色预测模型及验证
1.1.1 反应釜温度灰色预测模型
灰色理论以部分信息已知的小样本不确定系统为研究对象,通过对部分已知信息的开发提取,实现对未来变化的定量预测[13]。本文以反应釜运行时的温度作为原始数据,建立GM(1,1)模型预测系统下一步温度。模型的精度与原始数据的取舍相关[14]。为了不断把进入系统的扰动考虑进去,采用等维新息滚动预测的思想,即GM(1,1)模型不断把新数据加入原始数据中,但这会造成原始数据过于庞大,因此在每加入一个新数据的同时就剔除一个旧数据,保持维数不变。预测模型推导过程如下:
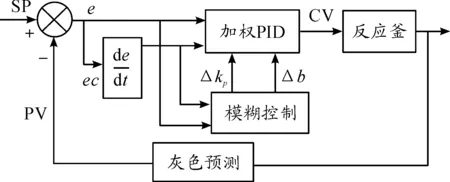
图1 模糊加权PID控制器
反应釜加热时取实测温度建立原始数据序列:T(0)=(t(0)(1),t(0)(2),…,t(0)(n)),T(0′)为T(0)的1-AGO序列:T(0′)=(t(0′)(1),t(0′)(2),…,t(0′)(n)),其中
(1)
对T(0′)进行紧邻均值运算,得到T(0′)的均值序列:
T(1)=(t(1)(1),t(1)(2),…,t(1)(n))
t(1)(k)=0.5(t(0′)(k)+t(0′)(k-1))
k=2,3,…,n
(2)
GM(1,1)模型的均值形式为:
t(0)(k)+at(1)(k)=b
(3)
GM(1,1)的均值形式的影子方程为
(4)
(5)
其中Y、B分别为:
(6)
式(4)的时间响应式为:
k=1,2,…,n
(7)

(8)
对应等维新息GM(1,1)的预测模型为
(e-a(m+k1-1)-e-a(m+k1-2))
(9)
式中:h为采样时刻;m为原始数据序列维数;k1为预测步数。
1.1.2 灰色预测模型仿真验证
图2为灰色预测模型预测温度与实际温度的比较,图3为图2的局部放大。可见该模型的平均相对误差为0.859%。平均相对误差反映了模型的预测精度[13-14],从预测结果来看该灰色预测模型可以用来预测反应釜的温度变化。
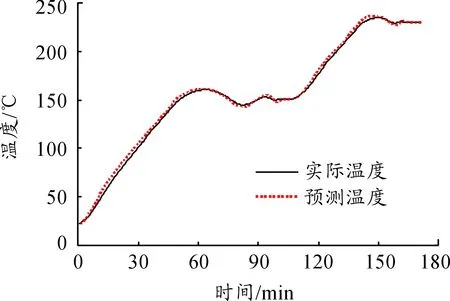
图2 灰色预测模型预测与实际值比较
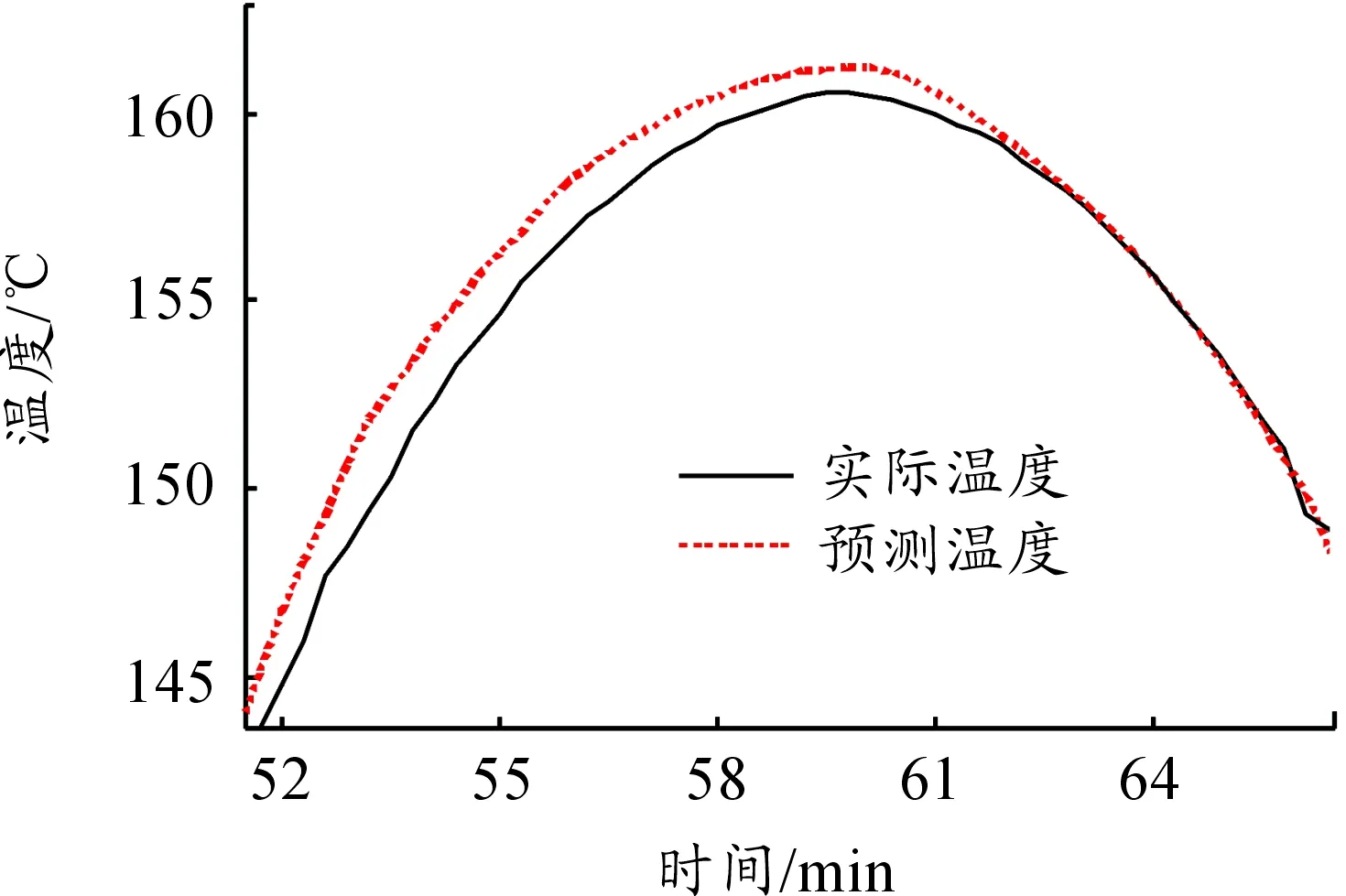
图3 灰色预测模型预测与实际值局部比较
1.2 模糊加权PID控制
1.2.1 加权PID
加入权重的PID数学表达式可描述为
(10)
式(10)符号说明如表1所示。
表1 加权PID公式符号说明
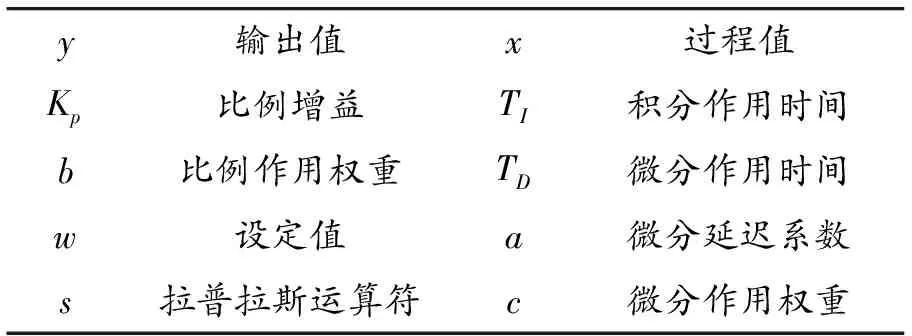
y输出值x过程值Kp比例增益TI积分作用时间b比例作用权重TD微分作用时间w设定值a微分延迟系数s拉普拉斯运算符c微分作用权重
加权PID在传统PID算法的基础上加入了设定值权重作用,为了获得抗干扰性最优同时有良好的跟随性,可以先用ZN法整定PID参数使抗干扰性最优,再对设定值权重进行调整,优化其跟随性[15]。为了加强适应性,采用模糊控制对权重b进行调解,同时调整PID的比例系数Kp。
1.2.2 模糊控制算法
模糊控制不需要依赖精确的系统模型,出发点是现场人员经验或专家知识,对于动态特性变化显著的非线性和滞后,时变系统尤其适用,主要包括模糊化、建立规则库、进行模糊推理、解模糊4部分[16]。
对b及Kp进行调解时通过制定合适的模糊控制规则,根据检测到的预测温度误差e及变化率ec,先模糊化,再通过模糊推理以及解模糊化计算出不同的调节量ΔKp、Δb,然后在线修正加权PID的参数,其计算公式如下:
(11)
为保证控制器的适用性,将模糊调节的输入e和ec的基本论域范围设定为[-30,30],根据手动调节经验将Kp的基本论域范围设定为[0,8],b的基本论域范围设定为[-0.5,0.5],设定e、ec、Kp、b的量化论域都为[-3,3],由基本论域和量化论域可确定量化因子和比例因子。输入、输出模糊集合为{NB,NM,NS,ZO,PS,PM,PB},分别代表负大、负中、负小、零、正小、正中、正大。为保证覆盖程度和灵敏程度,各模糊子集都采用三角形隶属度函数[17]。
依据专家经验和现场实际调试经验,建立模糊控制规则如表2所示。最终依据建立的规则表进行模糊推理,并运用中心法对模糊结果进行解模糊化,最终得到适用的模糊查询表供离线查询使用。
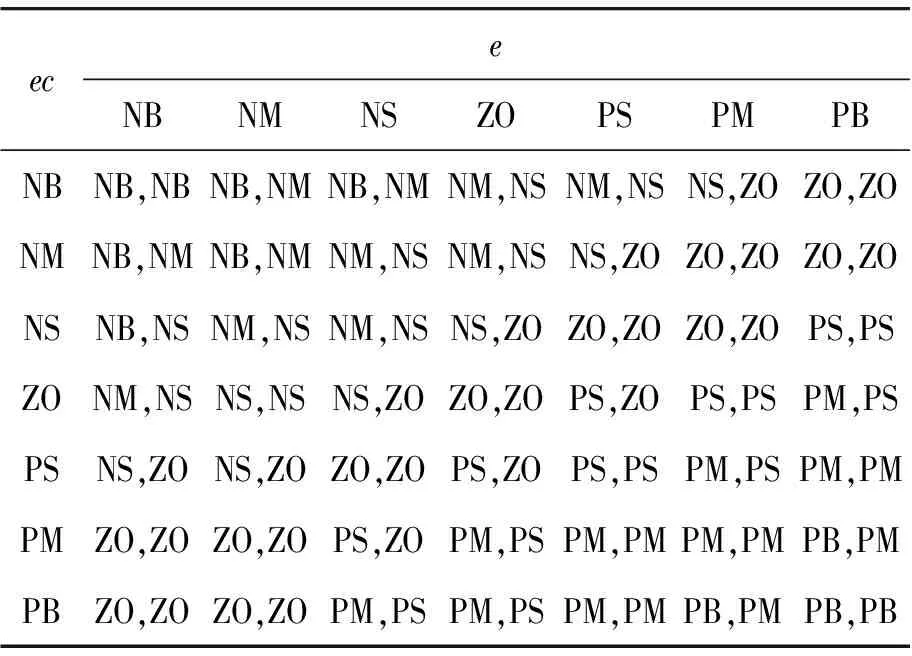
表2 Kp、b的模糊控制规则
2 温度控制系统的实现及实测结果
2.1 温度控制系统的设计及实现
反应釜温度控制系统基于PLC和WinCC设计,包括上位机和下位机两部分。下位机基于PLC、周波控制器、固态继电器、传感器构建控制系统,上位机利用WinCC组态功能构建监控系统,其结构见图4。
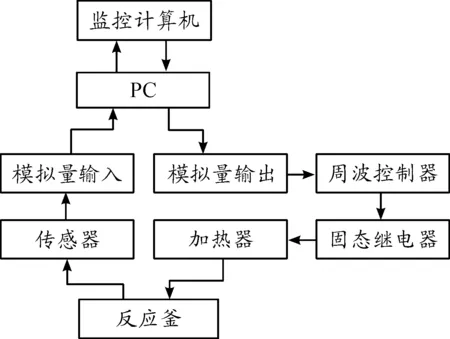
图4 温度控制系统结构
通过上位机监控反应釜的状态和一些参数信息,并把控制指令、温度曲线传给下位机,同时灰色预测模型的编程与计算也由上位机完成。下位机接收上位机数据根据控制算法实施控制作用,通过传感器采集温度信息并通过周波控制器控制固态继电器以达到控制反应釜加热器电压的目的[18]。
2.2 温度控制实测结果
以反应釜为对象,以150 ℃和230 ℃工艺要求进行试验,每隔5 s通过监控计算机采集1个温度数据,将采集的温度数据用Matlab绘制出来。图5为传统PID方式下的温度趋势,图6为基于灰色预测与模糊PID控制方式(称为新型控制方式)下的温度趋势。2种控制方式下的性能对比分析如表3所示。
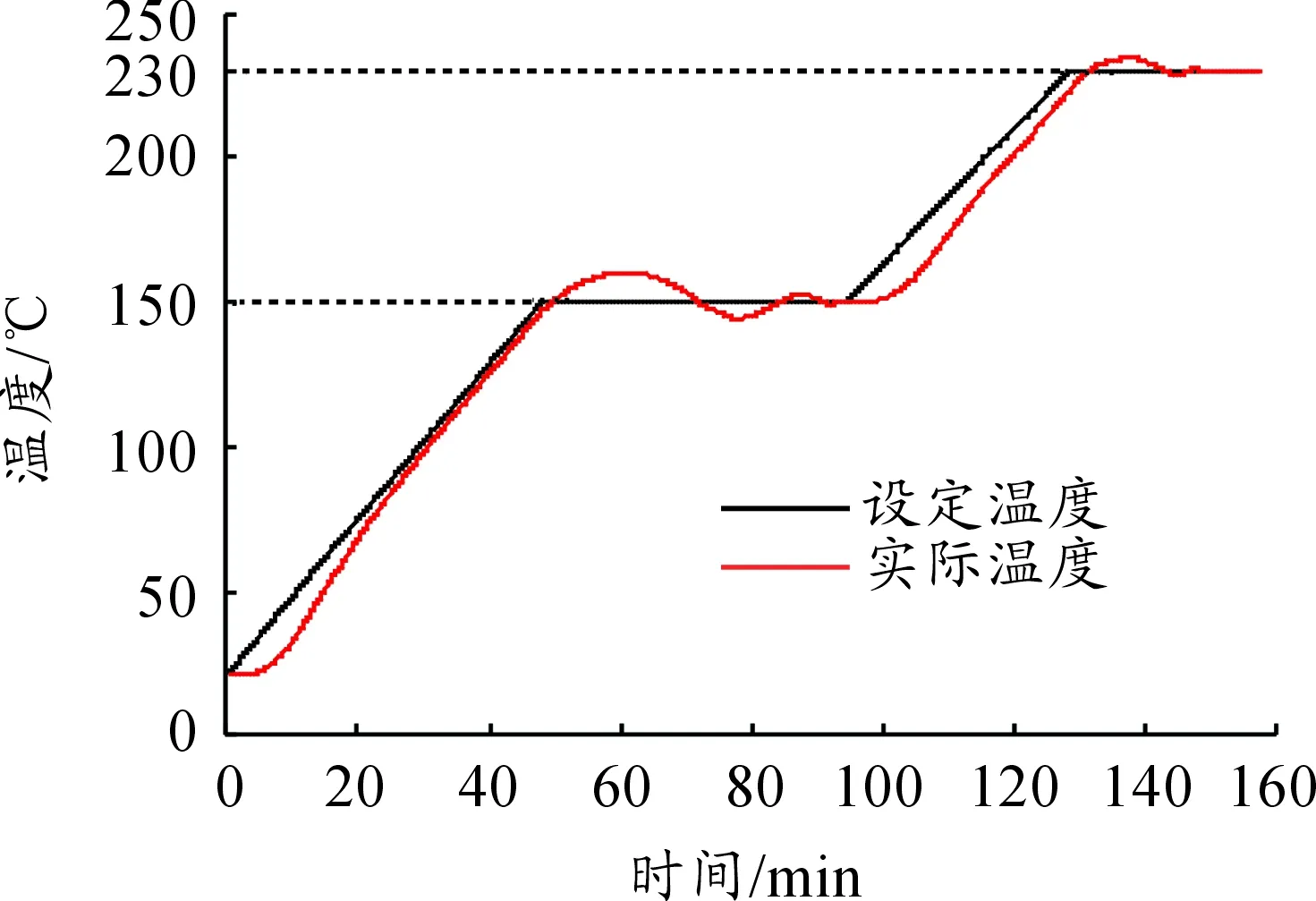
图5 传统PID控制方式下的温度曲线
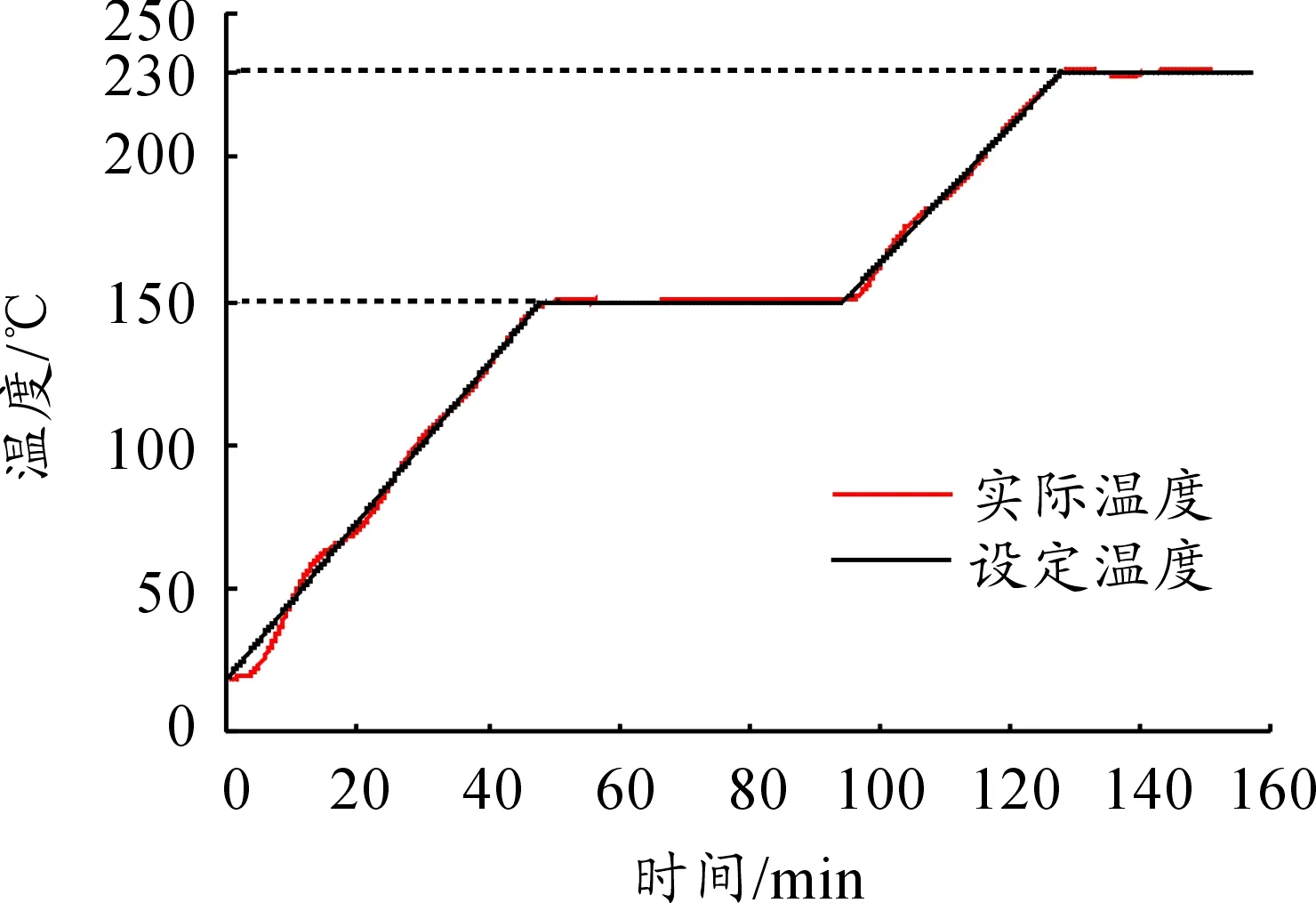
图6 模糊加权PID控制方式下的温度曲线
由图5和图6以及表3的分析可以看出:基于灰色预测与模糊加权PID的控制方式与传统PID控制方式相比有更快的响应速度、更好的跟随性、较小的超调量和较好的稳定性,控制效果有了明显的改善。
表3 2种控制方式下的性能对比分析
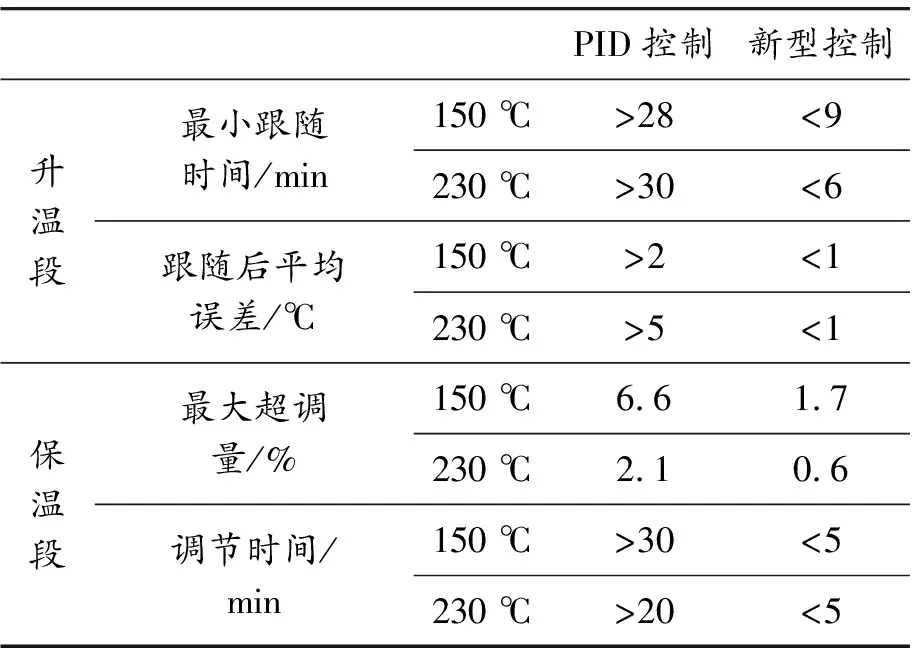
PID控制新型控制升 温 段最小跟随时间/min跟随后平均误差/℃150 ℃>28<9230 ℃>30<6150 ℃>2<1230 ℃>5<1保 温 段最大超调量/%调节时间/min150 ℃6.61.7230 ℃2.10.6150 ℃>30<5230 ℃>20<5
3 结束语
针对反应釜的滞后性、非线性、弱跟随性,以及原有控制方法的弊端,引入了基于灰色预测与模糊加权PID的控制器对反应釜温度进行控制。现场实践表明:该控制方法的动态特性和静态性能都优于传统控制方式,具有较好的跟随性、适应性、稳定性和控制精度。该研究对于改善工业中反应釜温度控制系统有一定的借鉴意义。但是该控制方式也有一定的局限性,仅适用于滞后非线性系统,难以满足精度要求特殊高的系统,而且其适应性虽然得到了改善,但外在环境变化大时还会对控制效果产生较为明显的影响。后续研究期望能使用控制领域前沿算法如神经网络、预测控制等来继续改善控制精度和适应性。