纯电动车用永磁同步电机控制策略研究
2019-03-19刘增玥祁朋伟韦永恒
罗 勇,吴 霏,刘增玥,刘 莉,祁朋伟,韦永恒
(1.重庆理工大学 汽车零部件先进制造技术教育部重点实验室, 重庆 400054;2.重庆青山工业有限公司 技术中心, 重庆 400000)
电力驱动系统是纯电动汽车的核心部件之一。电力驱动系统主要包括电机和电机控制两部分[1-3]。基于电动汽车对驱动系统的要求,电机要满足:
1) 体积小,使得汽车的布局灵活;
2) 高效率,提高经济性,延长续航里程;
3) 可靠性高,保障汽车动力性和安全性;
4) 降低汽车的成本;
5) 低噪音,提高舒适性;
6) 大转矩和宽转速,大转矩提高汽车的动力性,宽转速可以实现纯电动汽车的无变速器直接驱动[4]。
普通工业使用的电机与纯电动汽车使用的电机相比,一般对电机体积没有过多要求。由于电机为生产资料,所以其制造成本和使用成本也更大,且工业电机往往工况单一,控制策略更加简便。
电动汽车的行驶工况复杂多变,如满负荷下的起步和爬坡、长下坡和制动、高速巡航阶、城市道路的蠕行、超车加速。另外,不同地区的气温和湿度会影响电机的性能。
由于汽车行驶工况的多样性,电动汽车永磁同步电机控制系统除了普通的电机控制系统具有的共性外,还要满足电动汽车的特殊要求:能使汽车高速稳定行驶;能应对城市拥堵道路的频繁启停;低速大扭矩以满足爬坡和起步快加速需求;刹车制动时能回收部分能量以提高续航里程;全速范围内有较高的运行效率[5-6]。
1 永磁同步电机模型
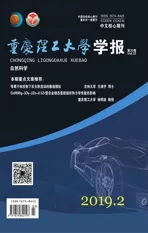
由于永磁同步电机定子和转子通过气隙磁场进行耦合,定子与转子之间有相对转动,因此永磁同步电机原始模型在三相静止坐标系下是一个时变、非线性、强耦合以及多变量的复杂系统,分析和求解它的微分方程组非常困难,故通常采用坐标变化的方法来简化模型、减少耦合[7]。这使得控制永磁同步电机像控制他励直流电机一样方便直接,这就是矢量控制的核心思想。他励型直流电机原理见图1。
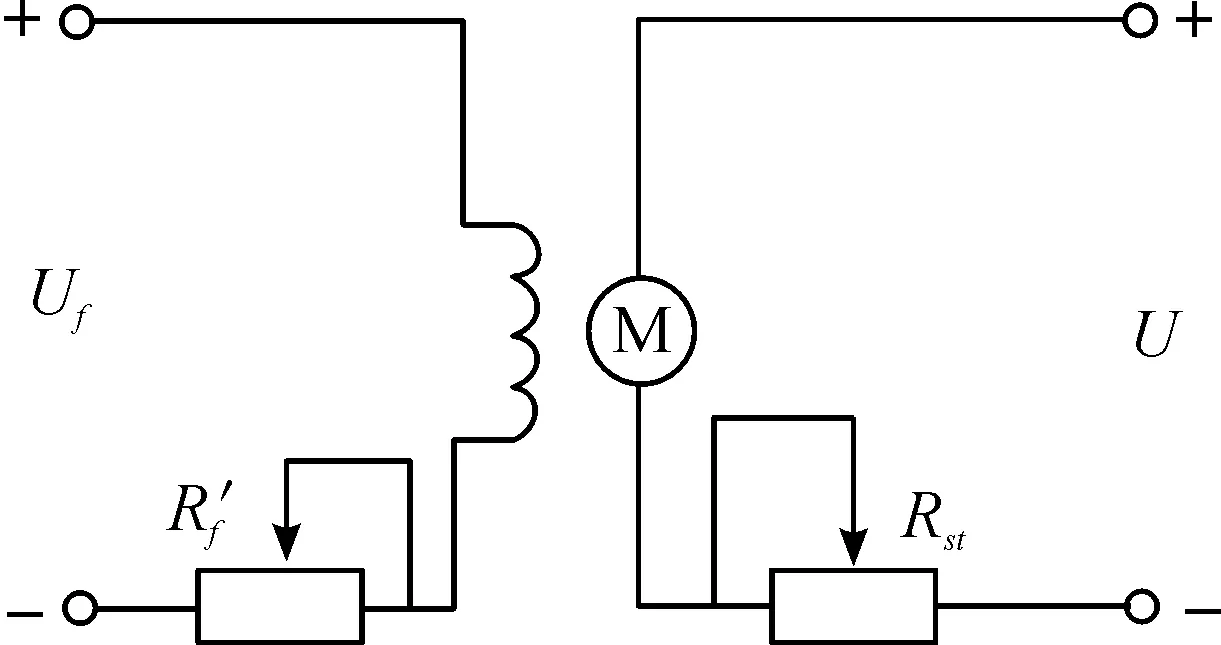
图1 他励型直流电机原理
基于转子旋转两相坐标系d-q的数学模型是目前在矢量控制方法中应用最为广泛的模型。
定子电压方程:
(1)
定子磁链方程:
(2)
将式(1)代入(2),可得到定子电压方程:
(3)
电机转矩方程:
Te=1.5Pn[ψfiq+(Ld-Lq)idiq]
(4)
其中:ud、uq分别是定子电压的d-q轴分量;id、iq分别是定子电流的d-q轴分量;R是定子的电阻;ψd、ψq为定子磁链的d-q轴分量;ωe是电角度;Ld、Lq分别是d-q轴电感分量;ψf代表永磁体磁链。
等效电路如图2所示。从图中可以看出,三相PMSM的数学模型实现了完全解耦[8]。
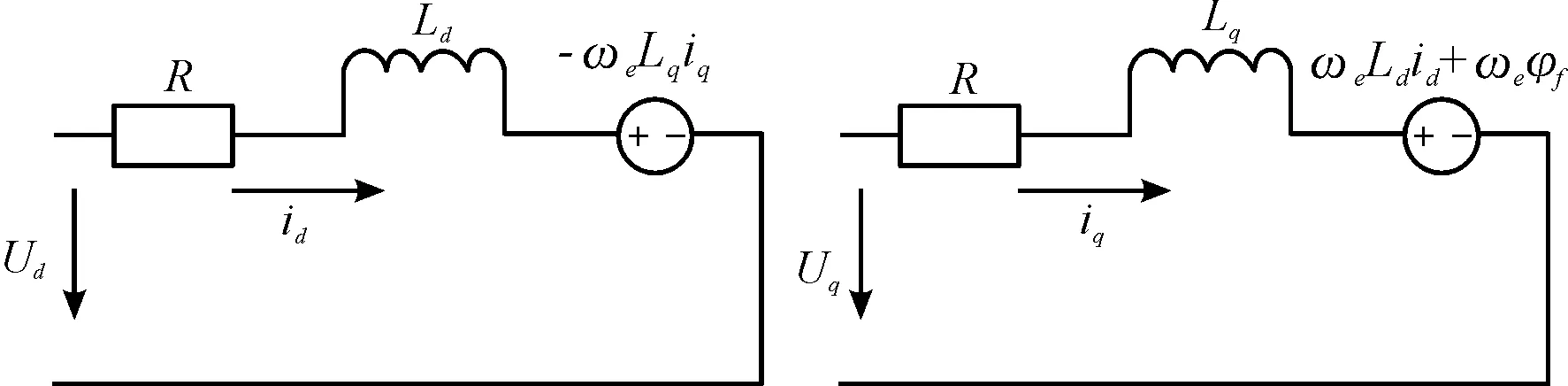
图2 PMSM等效控制电路
2 控制策略
图3为PMSM的直交轴电流id-iq坐标系组成的平面,定子端电压Us和相电流Is受到逆变器输出电压和输出电流极限(Usmax和Ismax)的限制。由此可得到电流极限圆:
(5)
电压极限椭圆:
(6)
由式(5)、(6)可以看出,电流极限圆是一个固定的圆,而电压极限椭圆是一个随着转速的上升而逐渐内缩的椭圆。
图3 PMSM电流极限圆、电压极限椭圆
2.1 Id=0控制
电机d-q坐标系下的电机转矩方程:
Te=1.5Pn[ψfiq+(Ld-Lq)idiq]
由永磁同步电机的转矩方程分析可知,当电机的结构参数极对数Pn、永磁体磁链ψf、交直轴电感Ld和Lq确定后,其转矩Te只与交直轴电流id和iq相关。如果令d轴的电流id为0,那么电机转矩方程简化为Te=1.5Pnψfiq,转矩大小和q轴电流大小成正比。只要调节合适的q轴电流,就能得到目标转矩。该控制策略简单明了,便于工程实践。同时,由于没有d轴电流,运行过程中不会产生永磁体退磁现象,有利于提高电机寿命[9]。但也因为d轴电流为0,导致永磁同步电机的磁阻转矩为0,没有发挥凸级永磁同步电机(内置式)转矩的最大潜力。对于隐极同步电机(表贴式)来说,其交直轴磁路结构的对称性导致直交轴电感Ld和Lq相同,由结构本身决定了其没有磁阻转矩,这样id=0控制策略可以达到MTPA的控制效果。因此,id=0控制策略在隐极式永磁同步电机中使用广泛,在汽车驱动系统中,使用较少。
2.2 MTPA控制
因IPMSM转子磁路结构不对称,能够产生磁阻转矩,故在电机控制系统中,采用最大转矩/电流(MTPA)控制策略可充分利用磁阻转矩,从而提高电机的转矩输出能力和系统效率(使最大的劲,出最少的力)。
重写电机d-q坐标系下的电机转矩方程:
Te=1.5Pn[ψfiq+(Ld-Lq)idiq]
当永磁同步电机的永磁体产生的磁链和交直轴电感Ld与Lq确定后,电机的转矩Te取决于定子直交轴电流id和iq。在id-iq的平面内,产生同一转矩Te,可以有多种id和iq的组合,针对每一Te,总会找到一组(id,iq)离原点距离最近[10]。而定子电流is为iq和id的合成矢量,这样每个Te对应一个最小的is。因此,MTPA控制能提高单位电流的转矩输出,一方面是由于电源直流母线电流的限制,在相同的电流限制下,MTPA控制方法能提供更高的转矩,从而改善汽车起步加速和爬坡的能力。另一方面,在电机产生同一输出转矩时,MTPA控制方法能优化配置交直轴电流,使得定子电流最小,从而降低电机的铜耗和逆变器损耗,提高了系统的效率,对于提高汽车续航里程有帮助。
参考数学中求最优解的问题,MTPA控制可以描述为在转矩一定的约束条件下,对定子电流求最优解[11],即:
(约束)
(7)
为了获取满足约束条件前提下Is最小时的id、iq,利用拉格朗日定理,引入辅助函数
(8)
式中λ为拉格朗日因子。对式(14)求偏导数,并令其等于0,得到
(9)
求解式(9),即可得到交直轴电流公式:
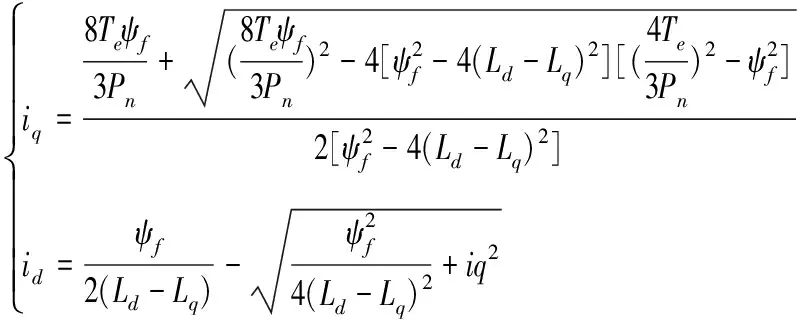
(10)
式中:Te为系统给定的转矩,其余参数如前所述。Id、Iq与转矩之间的关系可以通过实时在线运算,进而实现MTPA控制。而在工程实践中,为了提高系统的实时性,减轻MCU运算负担,往往对不同转矩下的交直轴电流进行离线计算标定,然后通过查表的方式实现MTPA控制。
2.3 弱磁控制
随着车速的提高,电机转速在提高,反电动势也随之增加,逆变器电压达到饱和。如果转速超过基速,电机的相电压达到极限值,不能继续增加,相电压将无法补偿随转速增大而增大的反电动势,因此无法为此提供所需的相电压和反电动势之间的电压差。此时定子电流无法跟踪给定电流,最后导致MTPA控制策略失效,转速控制失败,使得汽车的车速不能达到驾驶员期望的目标车速。
为了拓宽纯电动汽车的转速区间,需要对驱动PMSM进行弱磁控制。由于位于永磁同步电机转子上的永磁体磁链不可调,故通过调节定子电枢电流的大小和相位,使得在PMSM的d轴上产生一个与永磁体磁链方向相反的电励磁,从而减小d轴合成磁链的大小,达到弱磁控制的目的[12]。
2.3.1 单电流弱磁控制
传统的PMSM矢量控制系统中,有2个电流调节器分别调节d、q轴电流。如果q轴电压为正常数uq,在高速稳定工况电机转速为ωe时,由于d轴和q轴电流的交叉耦合,使得它们满足:
(11)
由式(11)可以看出:在转速一定且给定q轴电压的情况下,d轴电流和q轴电流成线性关系。这时可以通过调节d轴的电流,从而间接控制q轴电流。所以,只需要1个d轴电流控制器就可达到弱磁控制的目的[13]。
2.3.2Uq的选定原则
假设电机负载转矩和电机转速恒定,uq对运行点的影响如图4所示:点划线为恒转矩曲线,黑色实线为电压极限椭圆,点线为电流极限圆。在单电流控制下,id、iq为式(11)所示线性关系,即id、iq关系在id、iq平面上是一条直线。当uq增加,直线向右移动[14]。
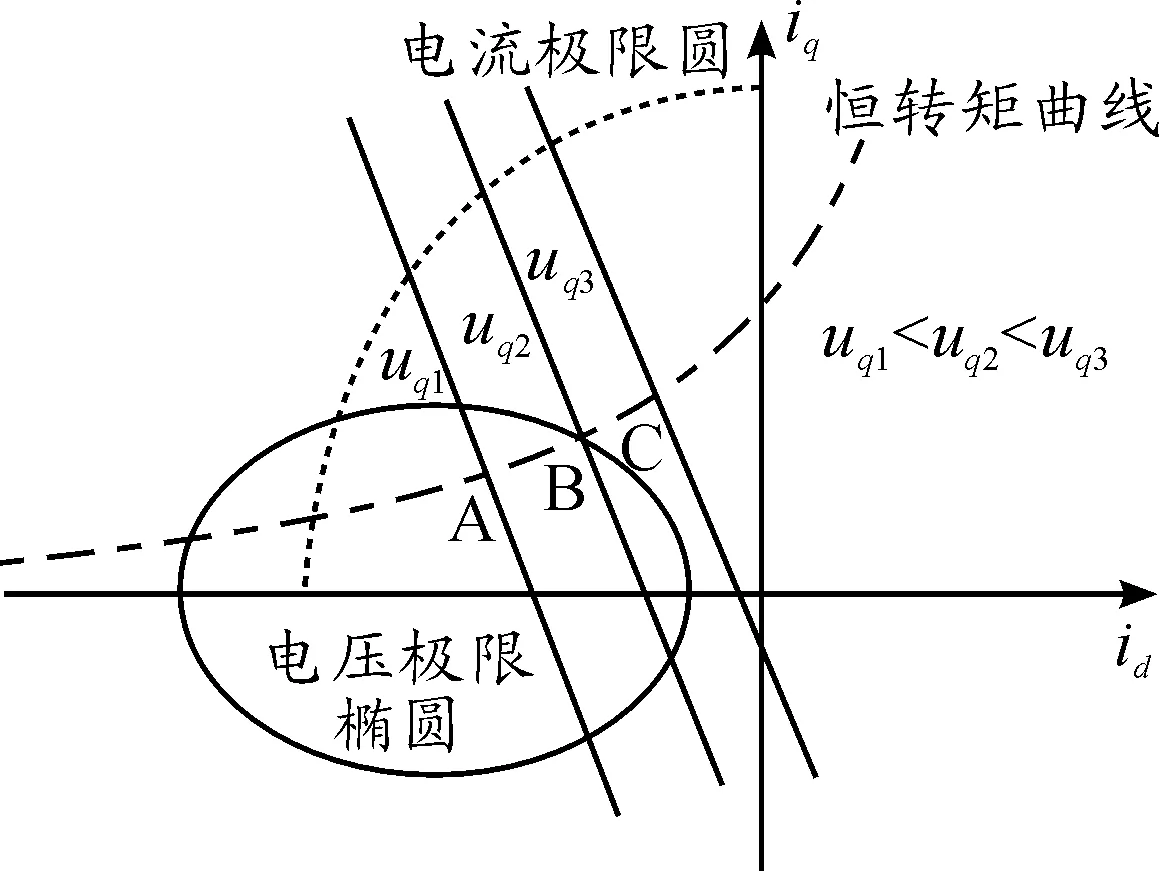
图4 PMSM运行点
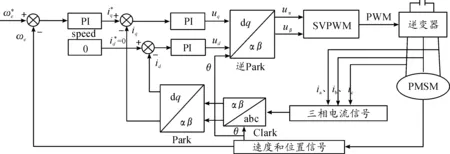
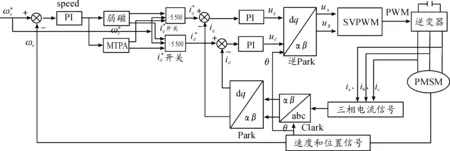
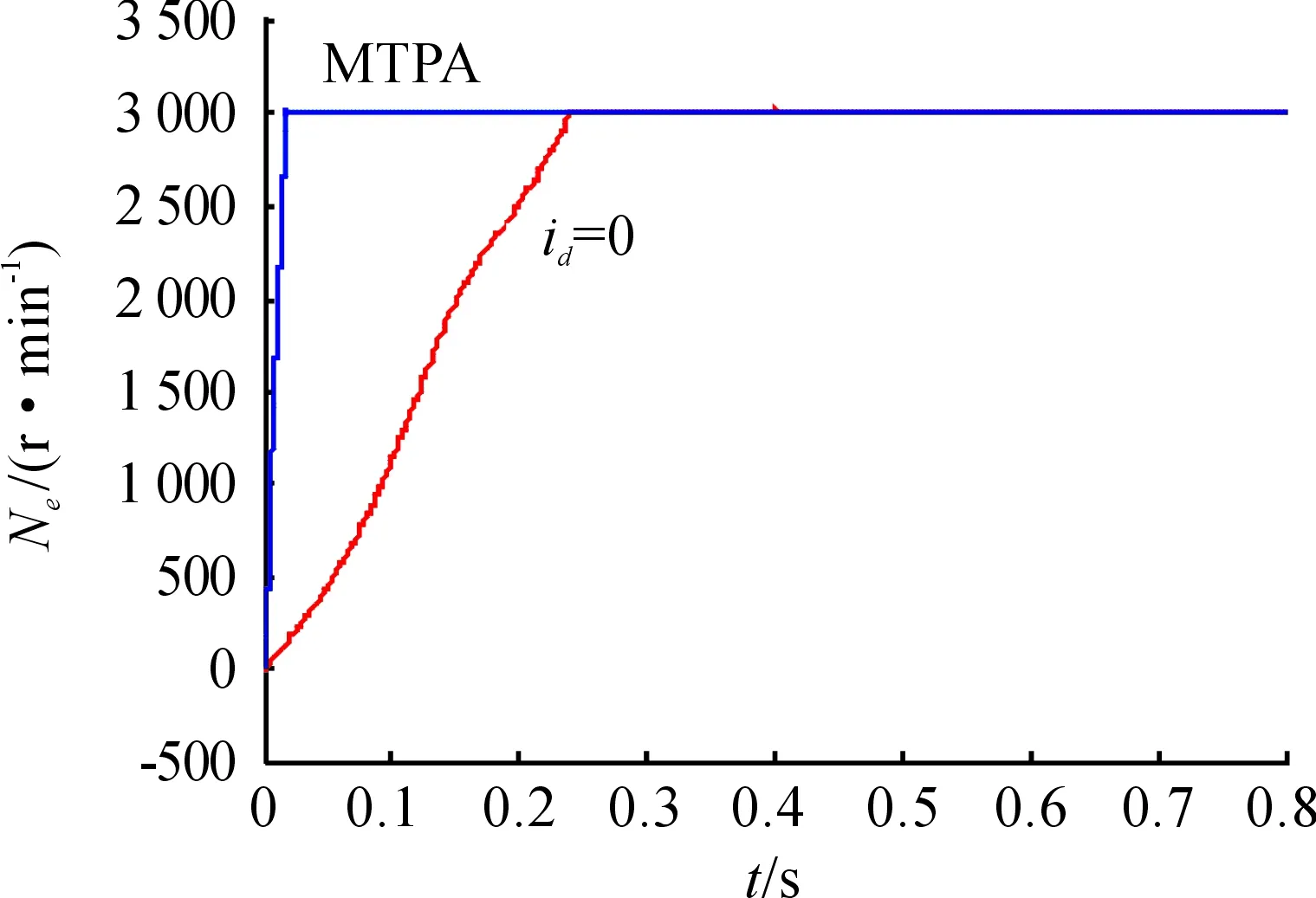
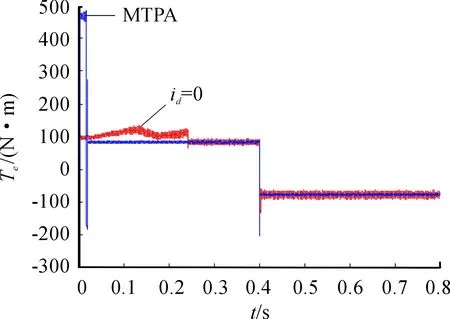
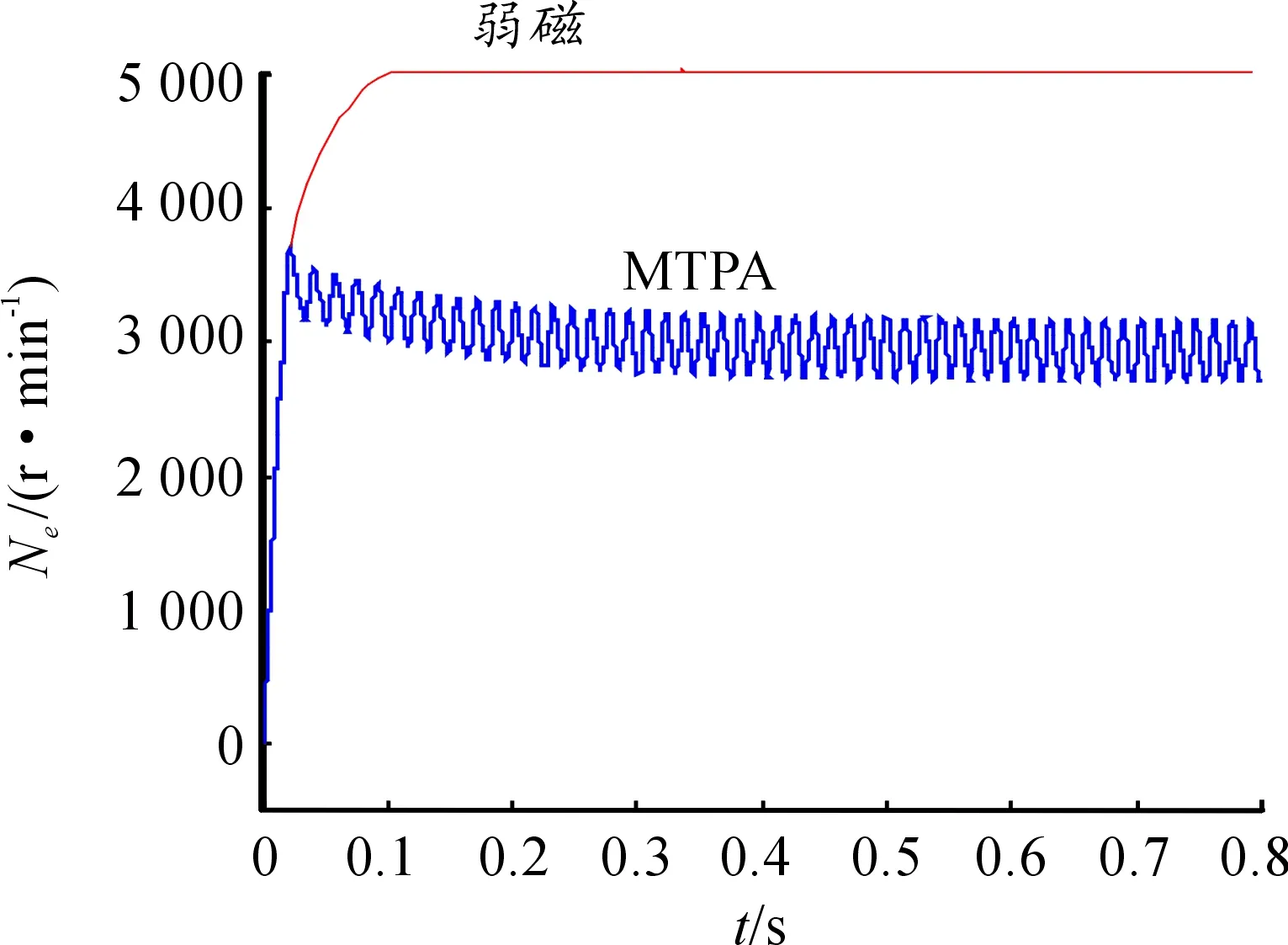
图4中uq1 2.3.3梯度下降法修正uq单电流控制 由分析可知,电机的稳定运行点为在电流极限圆、电压极限椭圆内的恒转矩曲线和式(11)表示的直线的交点。若满足电压电流的约束,uq增加,运行点沿着恒转矩曲线向右移动;反之uq减小,运行点沿恒转矩曲线向左移动。梯度下降法的思路是:在电压电流的约束下,根据电流下降梯度和恒转矩曲线切线方向的角度,判断能使运行电流减小的移动方向,并通过改变uq,使得运行点向电流减小的方向移动。 转矩上升方向: (12) 恒转矩方向与转矩下降方向垂直,故向左的恒转矩方向可表示为: (13) 同理,电流下降梯度的方向: (14) 向左恒转矩方向和电流下降方向的向量积: f(x)=3Pn[ψfiq+(Ld-Lq)idiq] (15) 当向量积f(x)>0时,向左恒转矩方向与电流下降梯度方向夹角为锐角,应减小Uq的给定值,使得交点左移。同理,当向量积f(x)<0时,向左恒转矩方向与电流下降梯度方向夹角为钝角,应增大Uq的给定值,使得交点右移。当夹角为直角时,保持当前给定Uq不变,此时的定子电流为满足运行工况的最小电流。另外,给定的Uq值必须在电压和电流极限(椭)圆内(图5)。 图5 PMSM最佳运行点 根据永磁同步电机矢量控制的原理,在Simulink环境下对本文的电机进行id=0控制、MTPA控制和弱磁控制,如图6所示。该模型主要由速度控制模块、电流控制模块、Clark变换、Park变换、逆Park变换模块、SVPWM信号模块、信号采集模块等组成。Simulink工具箱中已封装永磁同步电机模块,将其参数设置后即可直接使用。 本文选用永磁同步电机的主要参数:定子电阻为0.02 Ω,转动惯量为0.02 kg·m2,永磁体磁链为0.041 Wb,极对数为6,直轴电感为0.185 mH,交轴电感为0.32 mH。 Id=0控制策略原理见图6。 MTPA与弱磁控制策略原理见图7。 图6 Id=0控制策略原理 图7 MTPA与弱磁控制策略原理 单电流弱磁控制原理见图8。 图8 单电流弱磁控制框图 图9为电机在低速阶段的id=0和MTPA控制时的仿真转速图,电机目标转速为3 000 r/min。可以看出,2种方法都能有效跟踪目标转速,使得实际车速满足驾驶员的期望车速。MTPA控制相比id=0下的电机转速上升更快,动态响应更优,能更快响应加速踏板的动力需求,改善了动力性。图10为电机的转矩图,在初速度为0加速到目标转速3 000 r/min的过程中,可以发现MTPA比id=0控制下的转矩大许多,这是由于内置式永磁同步电机的交直轴电感不相等引起的磁阻转矩造成的,而MTPA刚好充分发挥了磁阻转矩的潜能,使得电机在低速时动态响应更敏捷。 图11为电机在基速以上的MTPA和弱磁控制转速图。显而易见,MTPA在基速以上,转速跟踪失败,而弱磁控制能很好地跟踪目标转速,实现纯电动汽车的高速稳定运行。 图9 低速MTPA与id=0控制转速结果 图10 MTPA与id=0控制转矩结果 图11 高速MTPA与弱磁控制转速结果 本文从纯电动汽车对驱动电机的需求出发,得出了低速阶段采用MTPA控制,高速阶段采用弱磁控制的IPMSM,适合用作纯电动汽车驱动电机的结论。在电机基速以下,比较了MTPA和id=0两种控制方法,仿真结果显示:MTPA控制能充分发掘IPMSM的转矩潜力,使得电机的动态响应明显优于id=0控制策略,改善了汽车的爬坡和起步加速等动力性能。同时,产生相同转矩所需的电流更小,电机损耗更低,有助于提高汽车的经济性。在电机基速以上,MTPA控制策略失效,不能实现目标转速跟踪,而采用弱磁控制策略能很好地扩充电机的转速范围,拓宽了汽车高速稳定运行时的车速范围。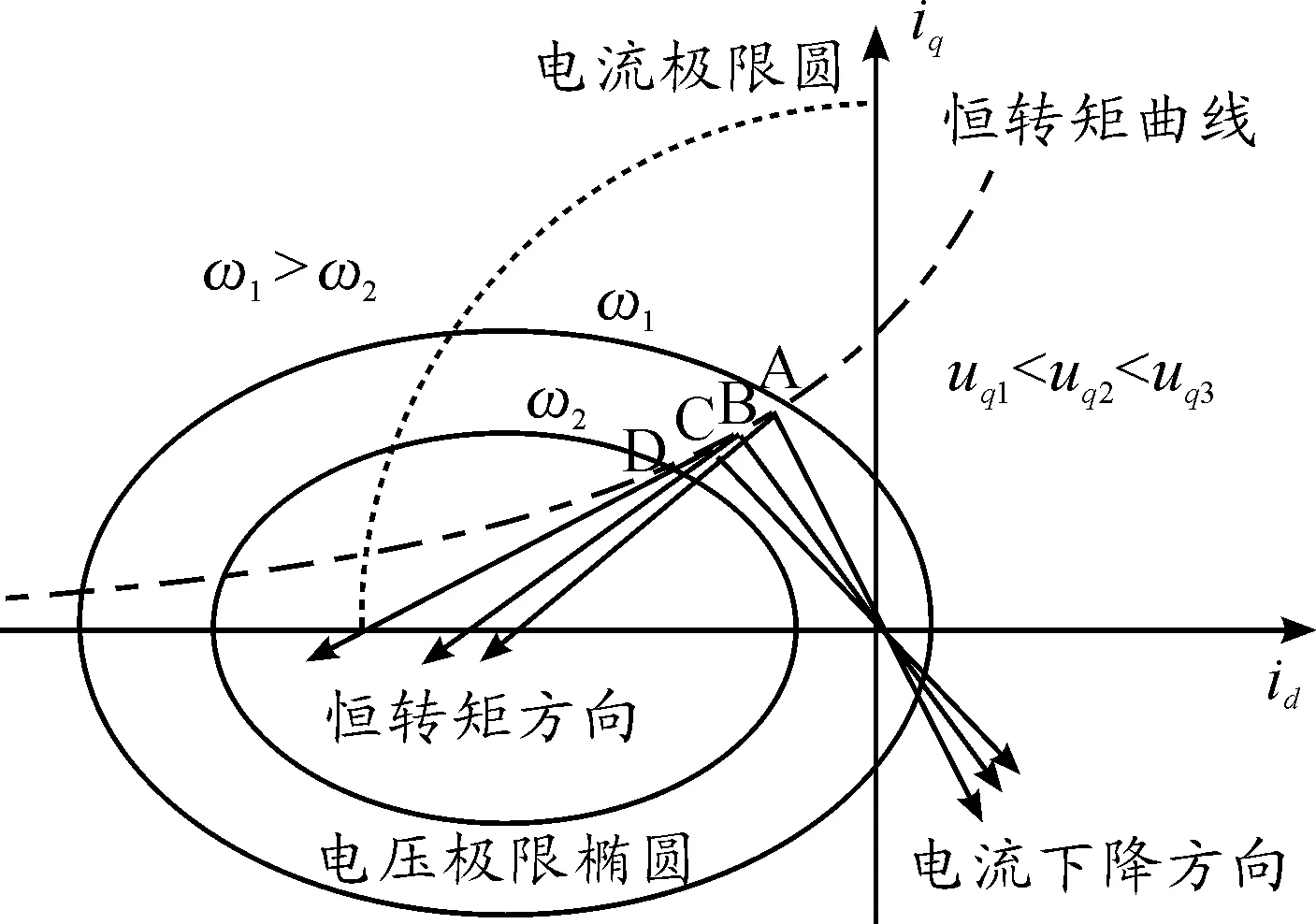
3 仿真
3.1 Id=0控制策略原理
3.2 MTPA与弱磁控制策略原理
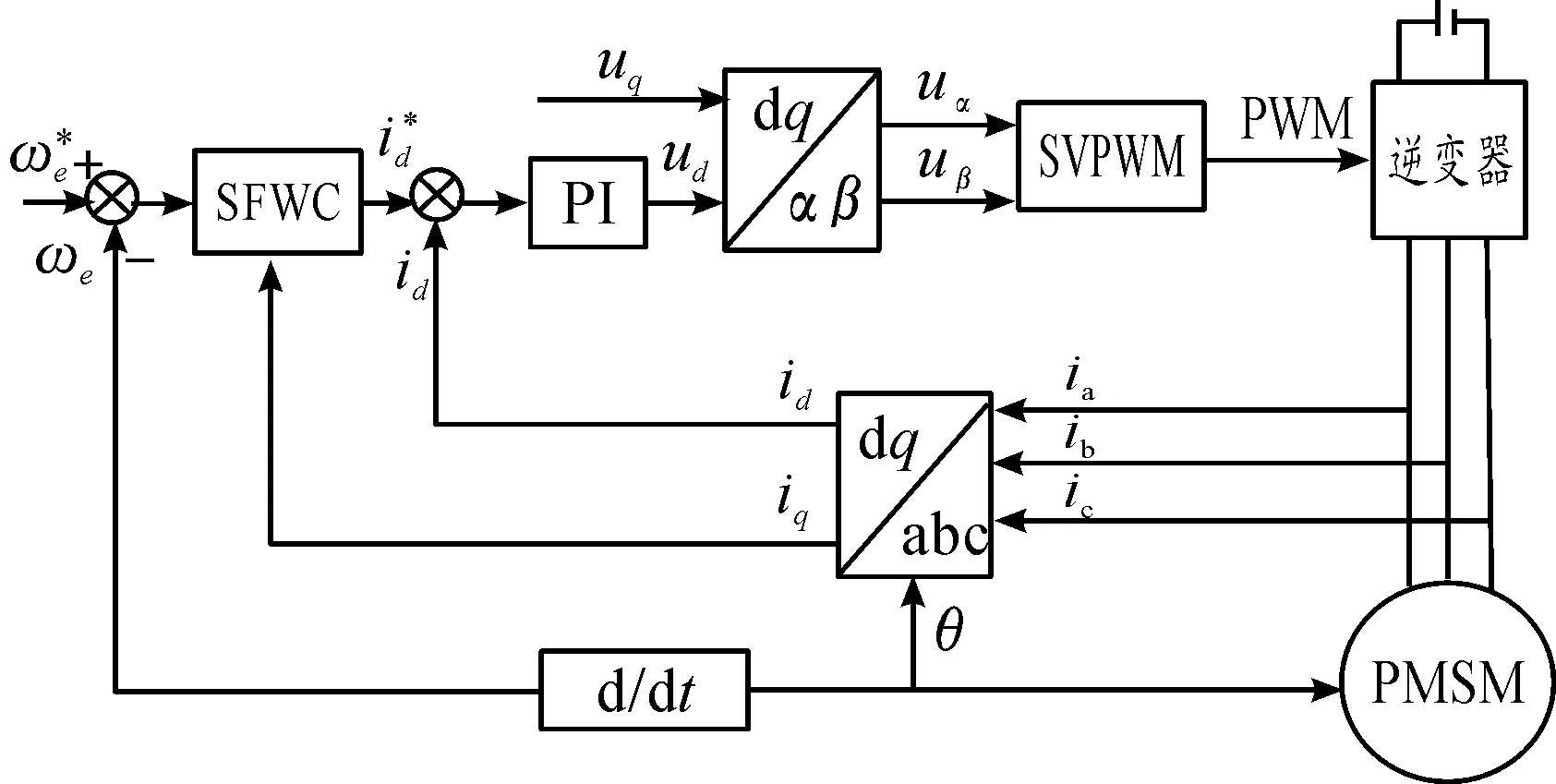
3.3 单电流弱磁控制原理
4 仿真结果分析
5 结束语