位移相关减振器对匹配机械弹性车轮的汽车操纵稳定性的影响
2019-03-19赵又群白毅强
周 凯,赵又群,徐 瀚,白毅强
(南京航空航天大学 能源与动力工程学院, 南京 210016)
车轮与轮胎作为车辆行驶系统的重要组成,其功用主要是支撑整车、缓和路面冲击、产生驱动/制动力等,在汽车舒适性、平顺性等方面起着重要作用[1]。机械弹性车轮是一种特殊的弹性车轮,理论上不存在现有充气轮胎爆胎、弹伤和爆损等问题,能提高轮胎的防刺破、防爆胎和安全性能。它拥有较大的侧偏刚度,能保证复杂路面下的操纵稳定性[2],但其大径向刚度特性导致了平顺性的不足[3-4]。
减振器是汽车的重要组成部分,其动态阻尼特性对于整车动力学性能有很大的影响[5]。而位移相关减振器与传统减振器不同之处在于其力学特性不仅与活塞的运动速度有关,还受活塞相对位置的影响[6],通常有旁通槽式[7]、液压限位式[8]、叶片式[9]等多种形式。其中旁通槽式位移相关减振器是在传统双向作用筒式液压减振器的活塞空载平衡位置处,通过在工作缸筒内壁上开设一定数量长度、横截面积一定的旁通槽得到的。目前,Choon-Tae Lee等[10]提出一种表征位移相关减振器动力学特性的数学模型,该模型将位移相关减振器分为软阻尼和硬阻尼2个区域,并通过在软、硬阻尼区设定过渡区模拟实际减振器特性。孙胜利[11]根据减振器结构和工作原理,把旁通槽式位移相关减振器抽象为等效的液压传动系统,应用Adams建立其动力学模型,模型仿真结果与试验数据基本吻合;对典型工况的仿真表明,旁通槽式位移相关减振器能够改善车辆乘坐舒适性和安全性。
本文为了研究位移相关减振器在匹配机械弹性车轮的汽车的操纵稳定性,建立位移相关减振器的Simulink模型并结合导入Carsim整车模型中的机械弹性车轮参数,利用Simulink与Carsim进行联合仿真试验,并与传统被动式双筒液压减振器进行比较。由试验结果可知,在空载高速状态下,装有位移相关减振器的车辆具有更好的操纵稳定性,平顺性也有所改善。此外,当车辆空载状态下行驶在良好路面时,该减振器提供的阻尼力较小,有利于改善汽车的行驶平顺性;当车辆满载行驶或者在转向、制动等紧急工况下,该减振器提供的阻尼力较大,能够有效控制车身姿态,抑制车轮振动,以保证汽车的行驶安全。
1 位移相关减振器
1.1 位移相关减振器的结构与原理
本文主要以某型旁通槽式位移相关减振器为研究对象,其特征在于工作缸筒内壁一定部位开有若干条长短不等、变断面的旁通槽,起泄漏减阻作用[12]。这种泄漏减阻作用取决于活塞与工作缸筒的位置,可以使阻尼随行程而合理改变。当汽车载荷变化时,悬架高度发生变化,减振器阻尼会因活塞位置与工作缸上的泄流槽相对位置不同而发生变化。
由图1旁通槽结构示意图可知,旁通槽以内区域为软阻尼特性区,旁通槽以外区域为硬阻尼特性区。当汽车载荷小时,泄流槽和泄流孔的流通面积较大,减振器工作特性处于软阻尼区,阻尼力较小,汽车行驶舒适性好;当汽车载荷较大时,泄流槽流通面积处于变小甚至处于堵塞状态,位移相关减振器阻尼特性与传统减振器基本相同,阻尼力较大,能保证汽车的行驶安全性。
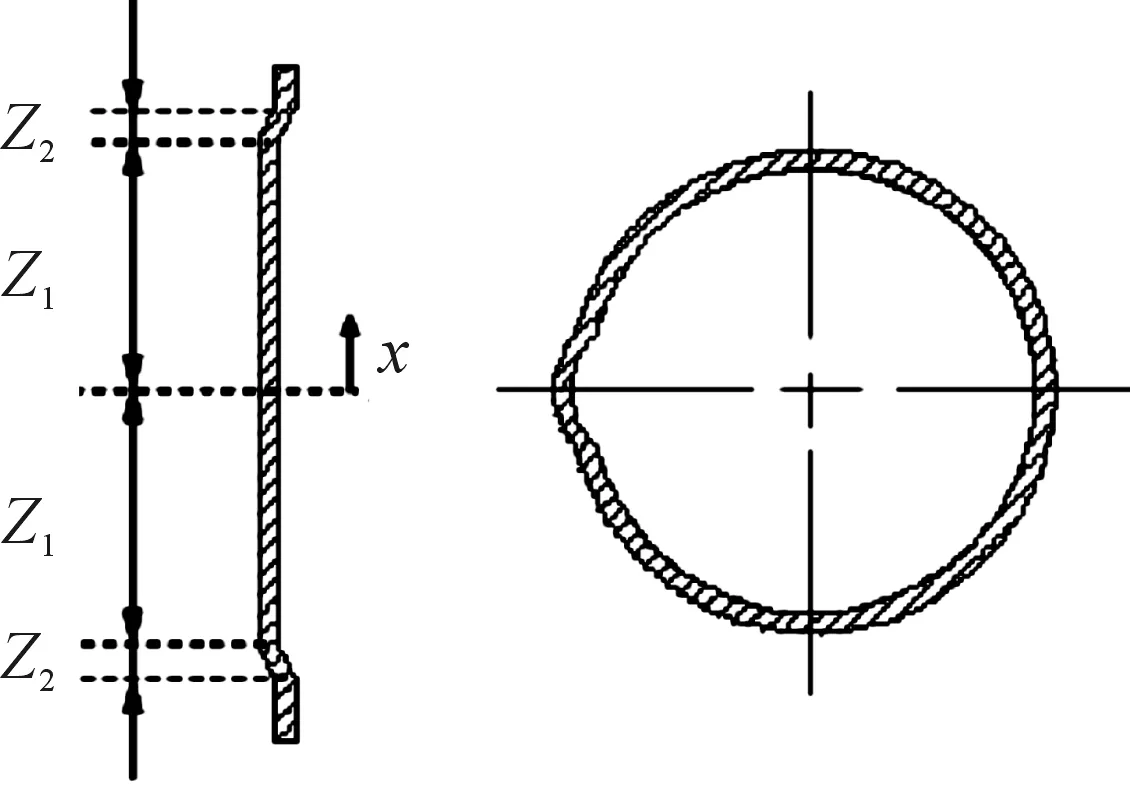
图1 旁通槽结构示意图
1.2 位移相关减振器理论模型推导
首先根据位移相关减振器工作时筒内油液的流通状况对其进行合理的简化假设,通过流体力学缝隙流动、管嘴流动及并联管路流量计算理论[13],推导出阻尼力计算公式[14],进而推导出位移相关减振器的理论数学模型。
本文仅以伸张行程为例对建模过程进行介绍。
由图2所示:当活塞处于旁通槽区域内时,位移相关减振器复原腔流入压缩腔的油液流量Qrm应分成 3 部分,分别为流经流通阀缺口Qrl、伸张阀(伸张阀片开启后)Qrf、旁通槽Qrp;当活塞运动到旁通槽区域外时,Qrp=0,即处于硬特性区域,与传统减振器阻尼特性相同,此时,油液流通路线及流量与传统减振器伸张行程相同。 当活塞处于旁通槽内以速度V运动时,油液流量Qrm的表达式如下:
Qrm=(Ap-Ar+Ax)·V
(1)
式中:Ap表示活塞面积;Ar表示活塞杆面;Ax表示某一活塞位置处的旁通槽总面积。
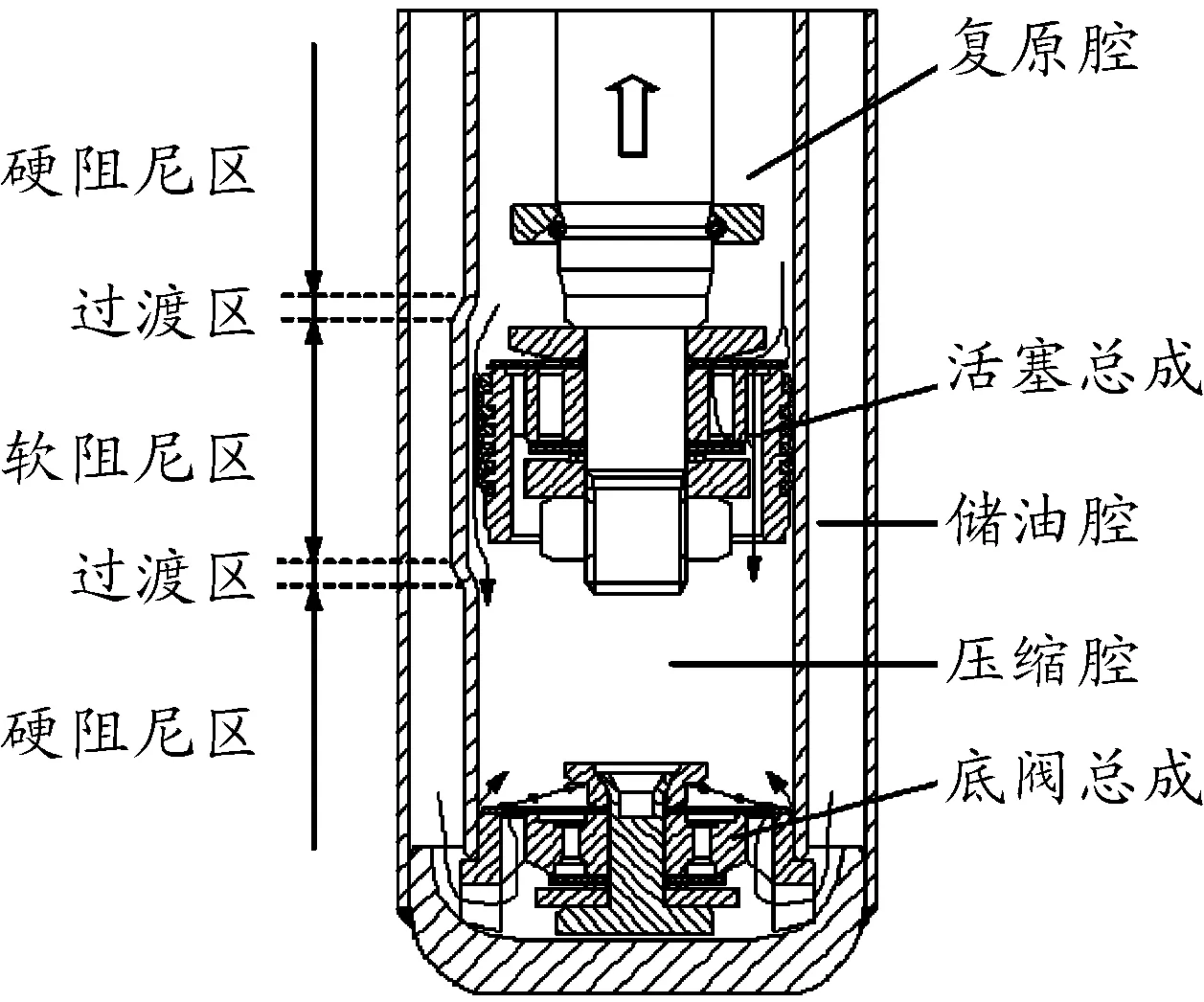
图2 位移相关减振器结构及伸张行程油液流动示意
流经旁通槽的Qrp≠0时,其两端的节流压差Prp可表示为:
(2)
式中:Qrm表示总流量;Qr表示活塞阀孔的流量;Ax表示某一活塞位置处的旁通槽总面积;ρ为油液密度。
伸张行程,活塞两端的各节流支路属并联关系,压差存在以下关系:
Prm=Pr=Prp
(3)
活塞处于旁通槽区域外时,活塞两端产生的总压差的求法与传统减振器相同,位移相关减振器压缩行程的推导过程与伸张行程思路相同。
1.3 位移相关减振器建模与验证
将位移相关减振器的旁通槽设为20 mm,减振器工作区总长为50 mm,建立位移相关减振器的Simulink模型,见图3。
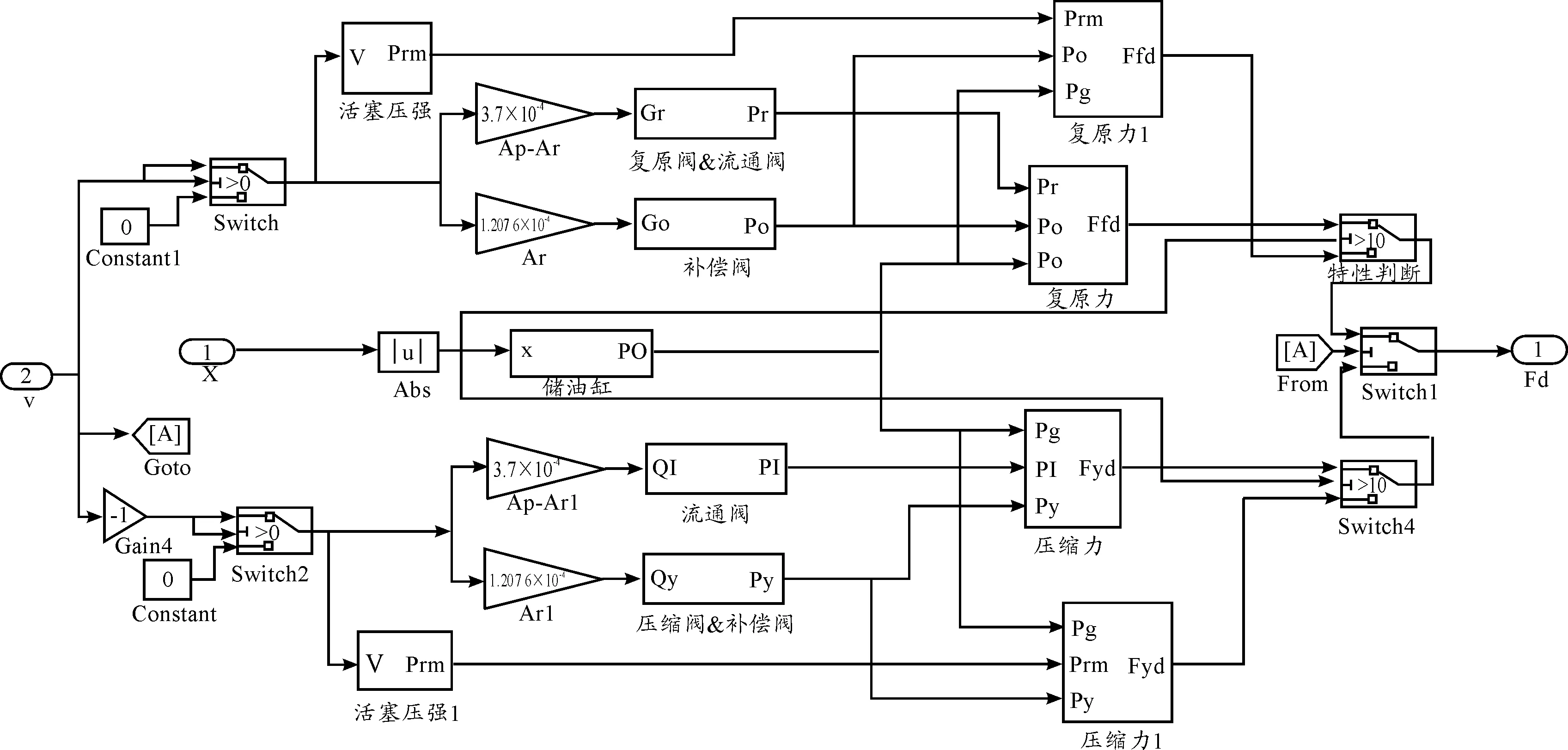
图3 位移相关减振器Simulink模型
如图4所示,将上述位移相关减振器Simulink模型进行封装,以正弦函数为输入,如图5所示,输出阻尼力如图6所示。检测可知位移相关减振器Simulink模型能够正常运行。
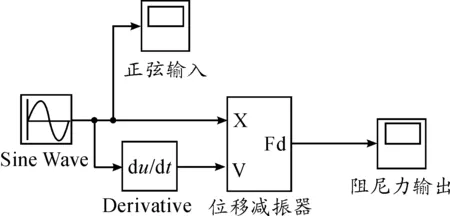
图4 位移相关减振器Simulink封装图
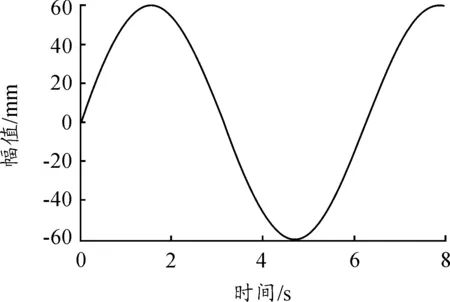
图5 正弦输入曲线
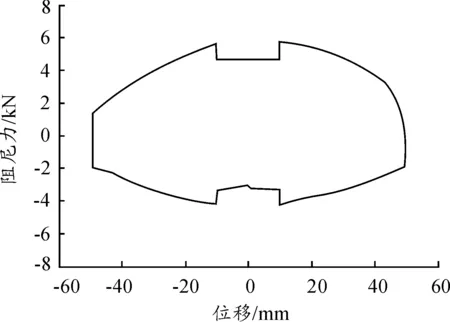
图6 位移相关减振器阻尼-位移曲线
由位移相关减振器阻尼-位移曲线分析可知,当位移大于10 mm时,即活塞处于旁通槽外,减振器工作在硬阻尼区,阻尼力较大,能够保证汽车行驶的操纵稳定性;当位移小于10 mm时,即位移处于旁通槽内,减振器工作在软阻尼区,阻尼力较小,有利于改善车辆行驶平顺性。表明该位移相关减振器仿真模型正确,符合预设要求。
2 机械弹性车轮的结构与原理
2.1 机械弹性车轮的结构与原理
机械弹性车轮是针对某型轮式特种车辆进行设计的,以期替代现在使用的某型子午线充气轮胎,主要由輮轮、轮毂、铰链组等部件构成,輮轮由橡胶胎圈、弹性环和卡环组成,如图7所示。

图7 机械弹性车轮结构
基本原理如下:当车辆驱动时,车身垂向载荷与发动机传来的扭矩经车轴传给轮毂,通过销轴传到铰链组使其状态发生改变,由微弯曲变成张紧,进而使铰链组对輮轮形成拉力。该力沿輮轮切向方向的分力克服机械弹性车轮与路面之间的静摩擦力,从而使车轮由静止状态开始滚动。同时在垂向载荷作用下,輮轮发生弹性变形,輮轮上部因受到来自于轮毂的向下拉力,使其有设定范畴内的适度的类椭圆的弹性变形,接地区域的輮轮由弧线变为直线段,而其他区域自由过渡。轮毂在铰链组拉力的作用下,悬挂于輮轮的中间位置。轮毂向下移动一段距离,位于轮毂下方的铰链组则不受力且呈弯曲状。该车轮在装车行驶的滚动运动中,各铰链组均从受拉力渐转至微曲不受力再至受拉力,即各铰链组形成“张紧-微屈-张紧”的状态变化,并以此方式循环。另外,因为轮毂在其任何瞬时均以微悬态悬于弹性外轮内,路面不平度将由輮轮的弹性变形以及铰链组的弯曲所缓解,故机械弹性车轮与正常充气轮胎有着同样的缓冲隔振性能[15]。
2.2 机械弹性车轮模型的建立
本文以匹配机械弹性车轮和位移相关减振器的某型越野车为研究对象,原车轮胎型号为265/70R16。根据轮胎的实际受力情况,建立了机械弹性车轮的有限元模型,并进行了静载试验验证[16],根据静载试验获得机械弹性车轮的形变量-垂向载荷关系数据,将其导入到Carsim中,建立机械弹性车轮模型,如图8所示。
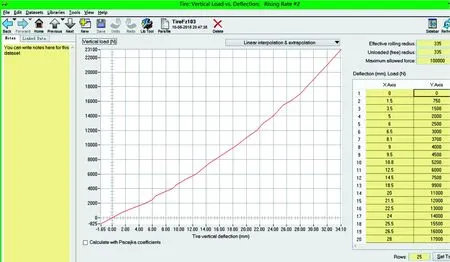
图8 机械弹性车轮刚度模型
3 整车联合仿真
3.1 整车联合仿真模型
将所建位移相关减振器的Simulink模型输入到整车Carsim模型之中,建立Simulink和Carsim整车联合仿真模型,如图9所示。
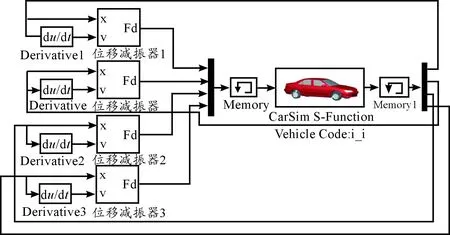
图9 联合仿真图
3.2 整车联合仿真试验
本文主要采取客观评价[18]即通过联合仿真试验获取相关数据曲线的方式分析位移相关减振器对操纵稳定性的影响。为了更好地分析得出位移相关减振器对匹配机械弹性车轮的汽车操纵稳定性的影响,将比较其与传统减振器的整车仿真实验数据,获取曲线图,得出相应的结论。具体是将安装了传统减振器和位移相关减振器的车辆模型分别在正弦崎岖路面和双移线道路下进行联合仿真试验,具体如下。
3.2.1 正弦崎岖路面
本小节将汽车车速设为60 km/h定值,在正弦崎岖路面下分别进行车辆空载(m=2 000 kg)与满载(m=3 000 kg)状态下的整车模型仿真实验,测取车辆仿真的车身垂向加速度曲线(图10),分析在不同载荷下车辆的车身垂向加速度的大小,不仅可以直接反映车辆行驶平顺性,而且可以间接判断车辆的操纵稳定性。一般加速度越小即车身跳动越小,车辆行驶平顺性越好,并且操纵稳定性也相对较好,反之则越差。
由正弦激励的崎岖路面仿真结果(图11~13)可知,两者功率谱密度峰值均远离人体对振动频率敏感的范围,而使用了位移相关减振器的汽车的垂向加速度的功率谱密度横坐标所围成的面积均低于装有传统减振器的车辆,表明位移相关减振器的垂向加速度均方根值低于传统减振器,即其行驶平顺性得到了改善;总体对比满载与空载2种状态下的车辆行驶状况可知,满载时车身垂向加速度幅值较空载时小,即平顺性较佳,同时车身跳动越小反映车身越‘硬’,表明车辆操纵稳定性也较好。
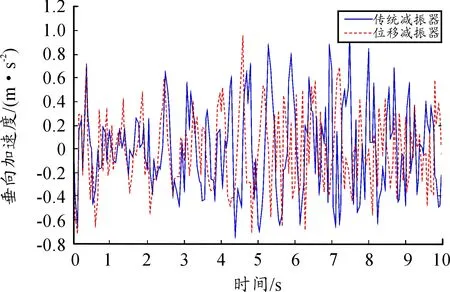
图10 空载正弦激励路面下的垂向加速度曲线
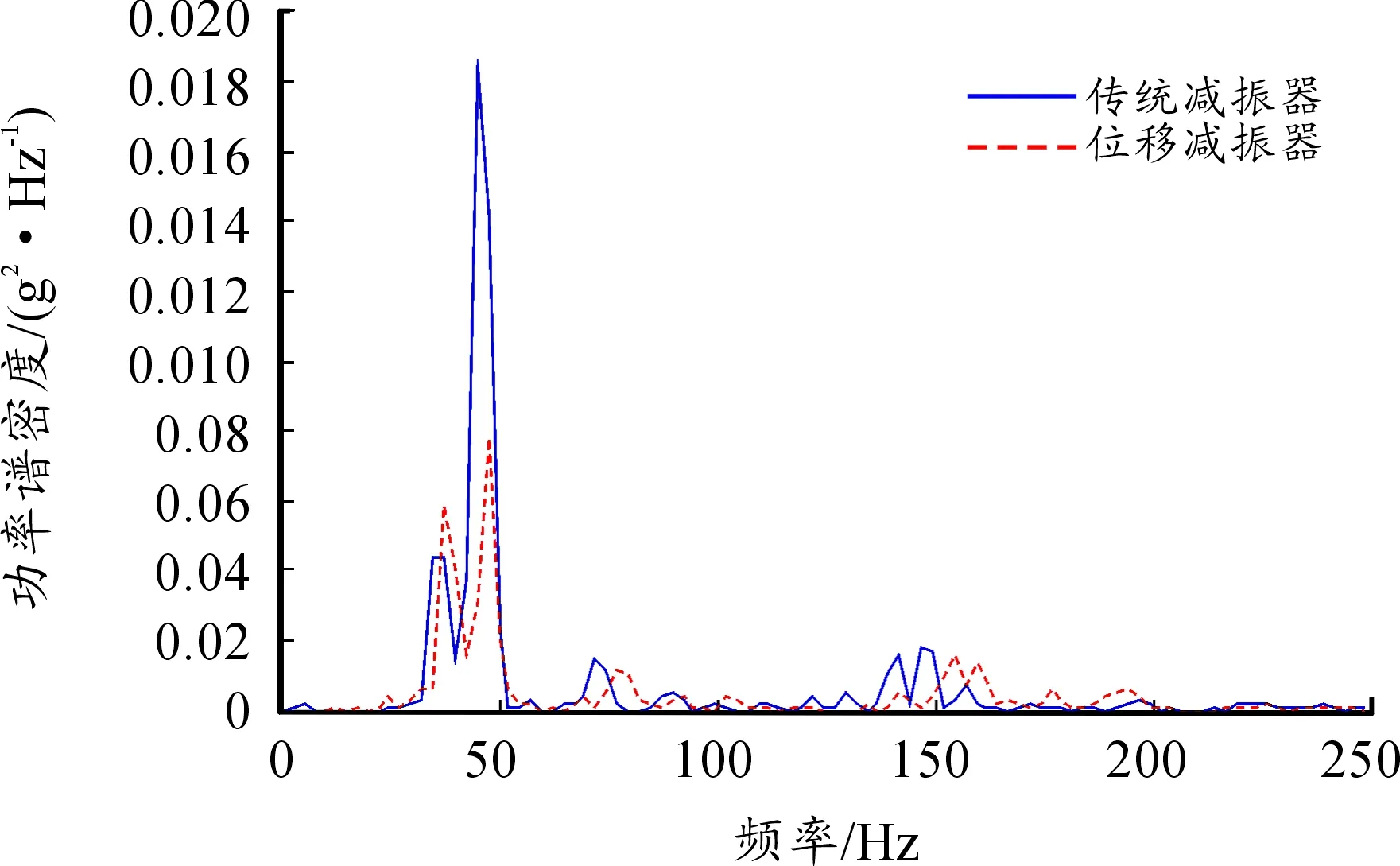
图11 空载正弦激励路面下的垂向加速度的功率谱密度
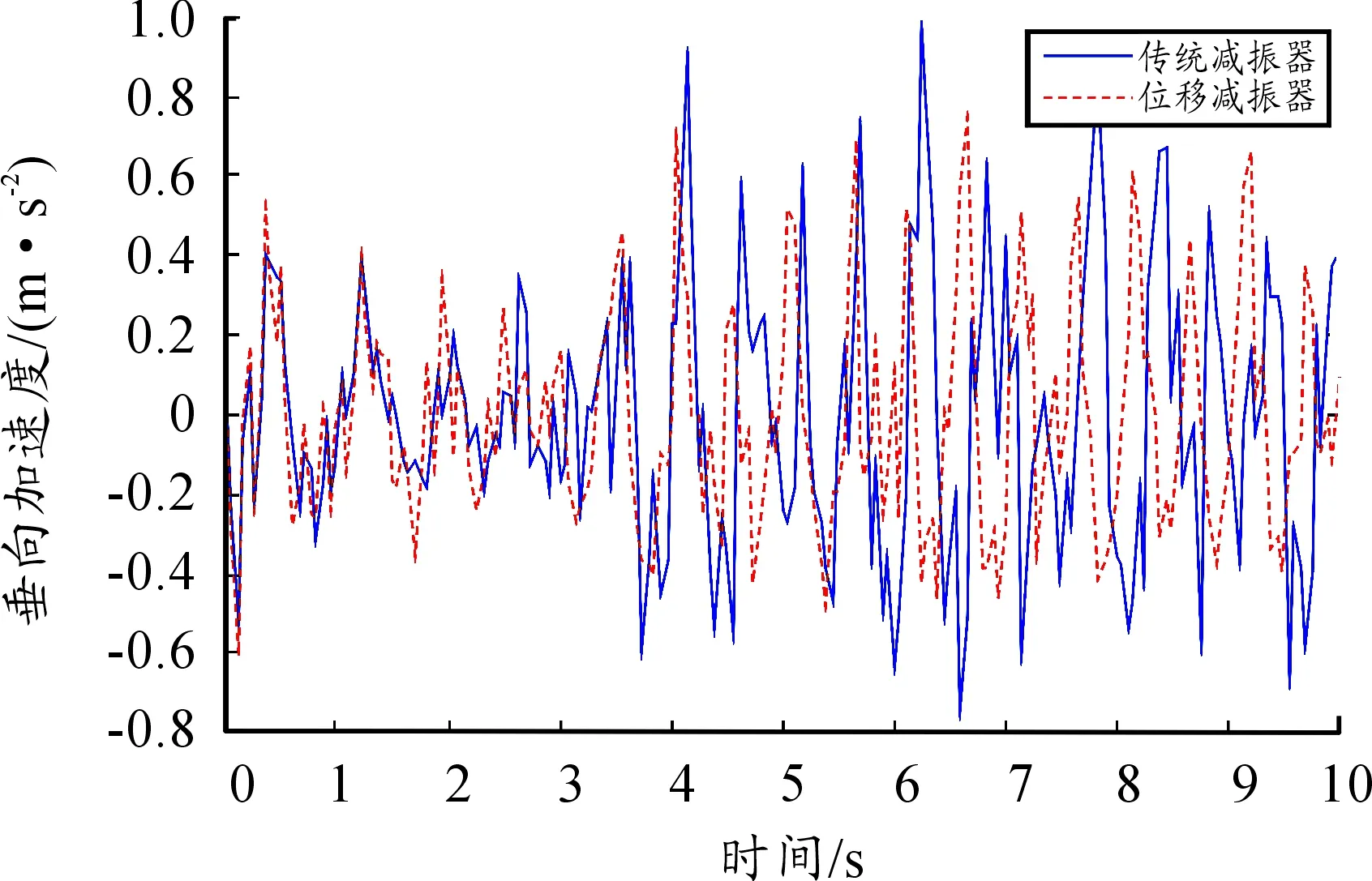
图12 满载正弦激励路面下的垂向加速度
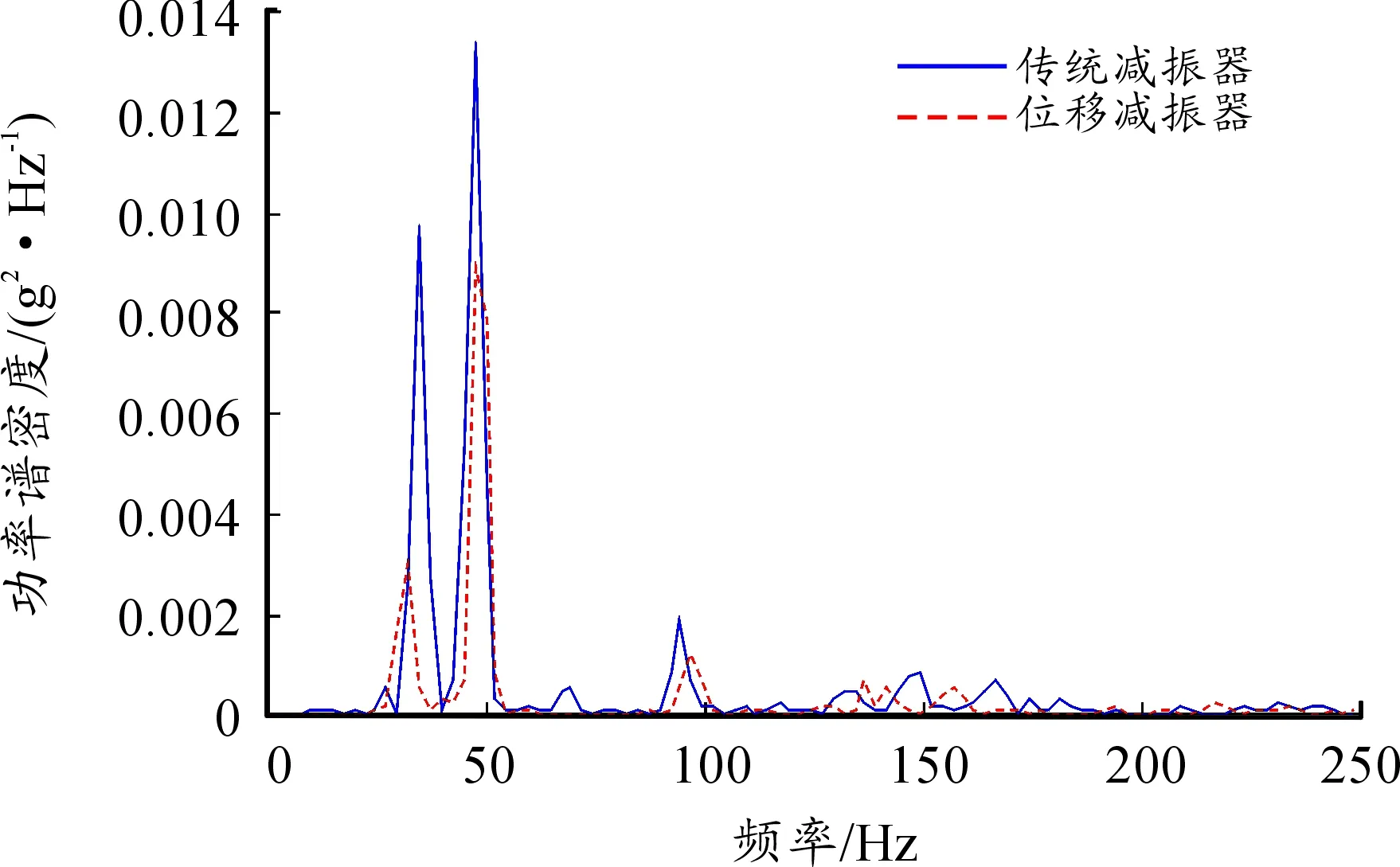
图13 满载正弦激励路面下的垂向加速度的功率谱密度
3.2.2 双移线道路
将汽车设置为同处于空载(m=2 000 kg)状况下,在双移线路面条件下分别进行不同车速(v=60 km/h与v=120 km/h)工况下的整车模型仿真试验,测取车辆仿真的侧向加速度及横摆角速度曲线进行操纵稳定性分析,结果见图14~17。
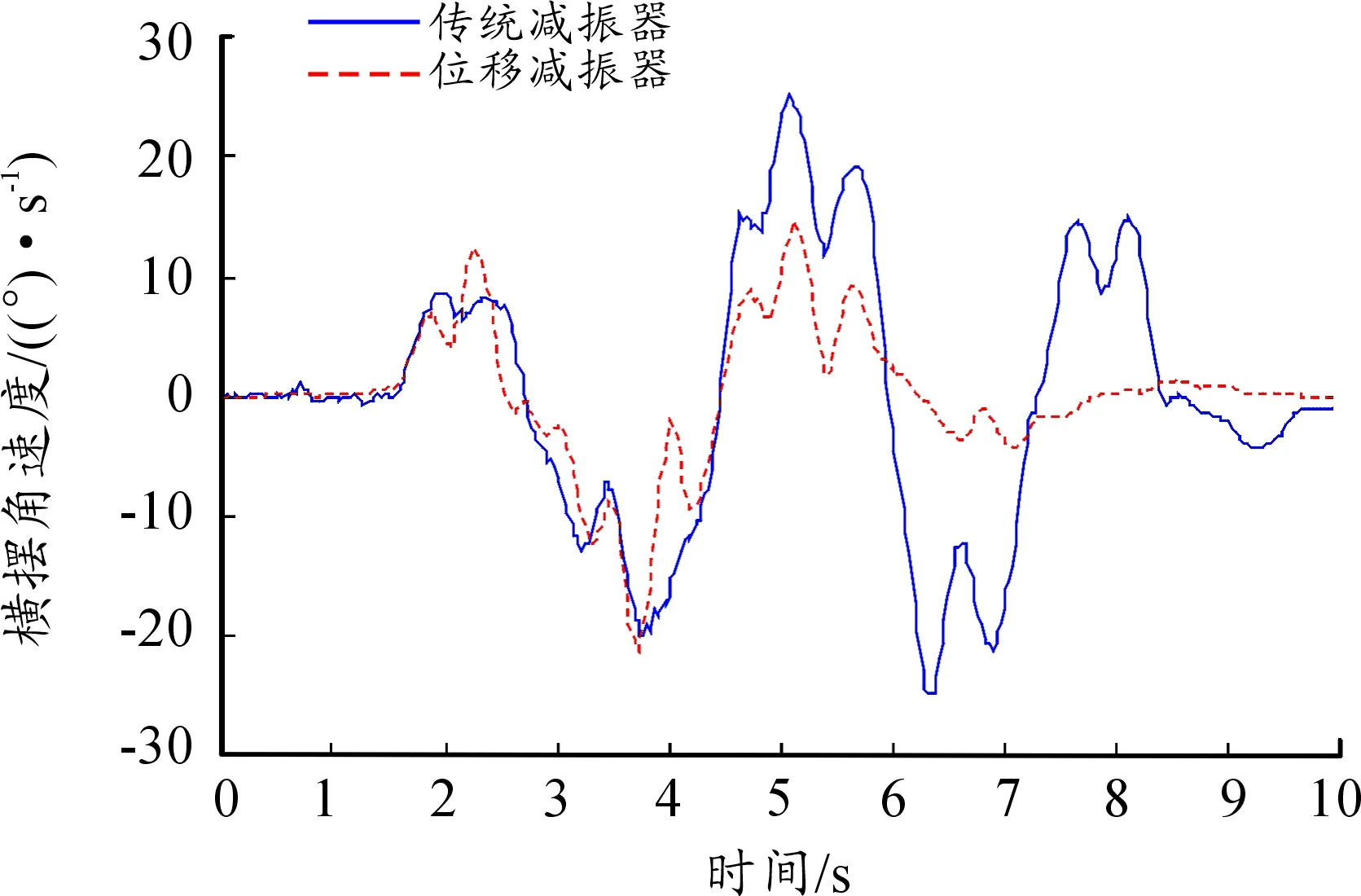
图14 车速为120 km/h时的横摆角速度
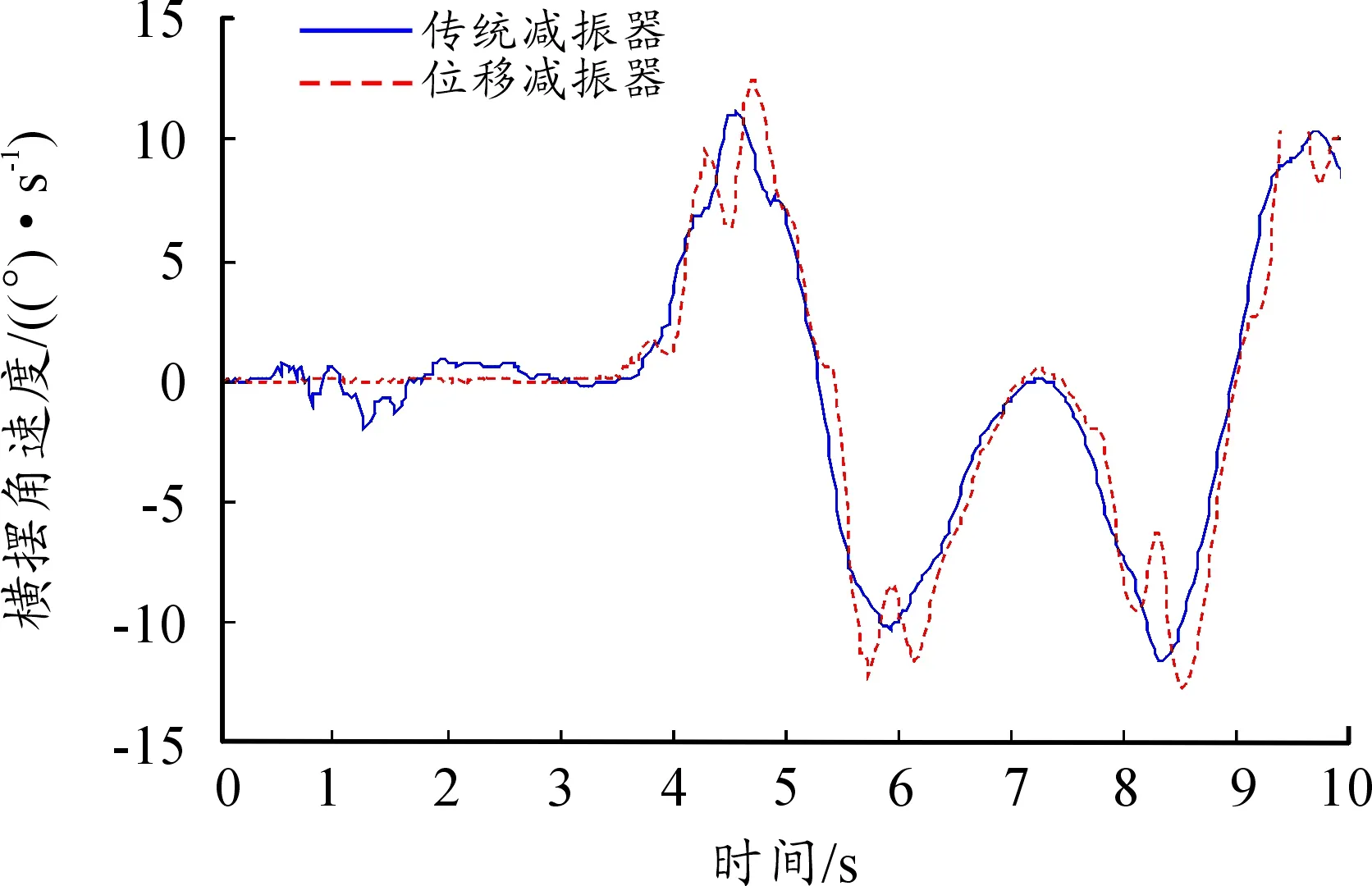
图15 车速为60 km/h时的横摆角速度
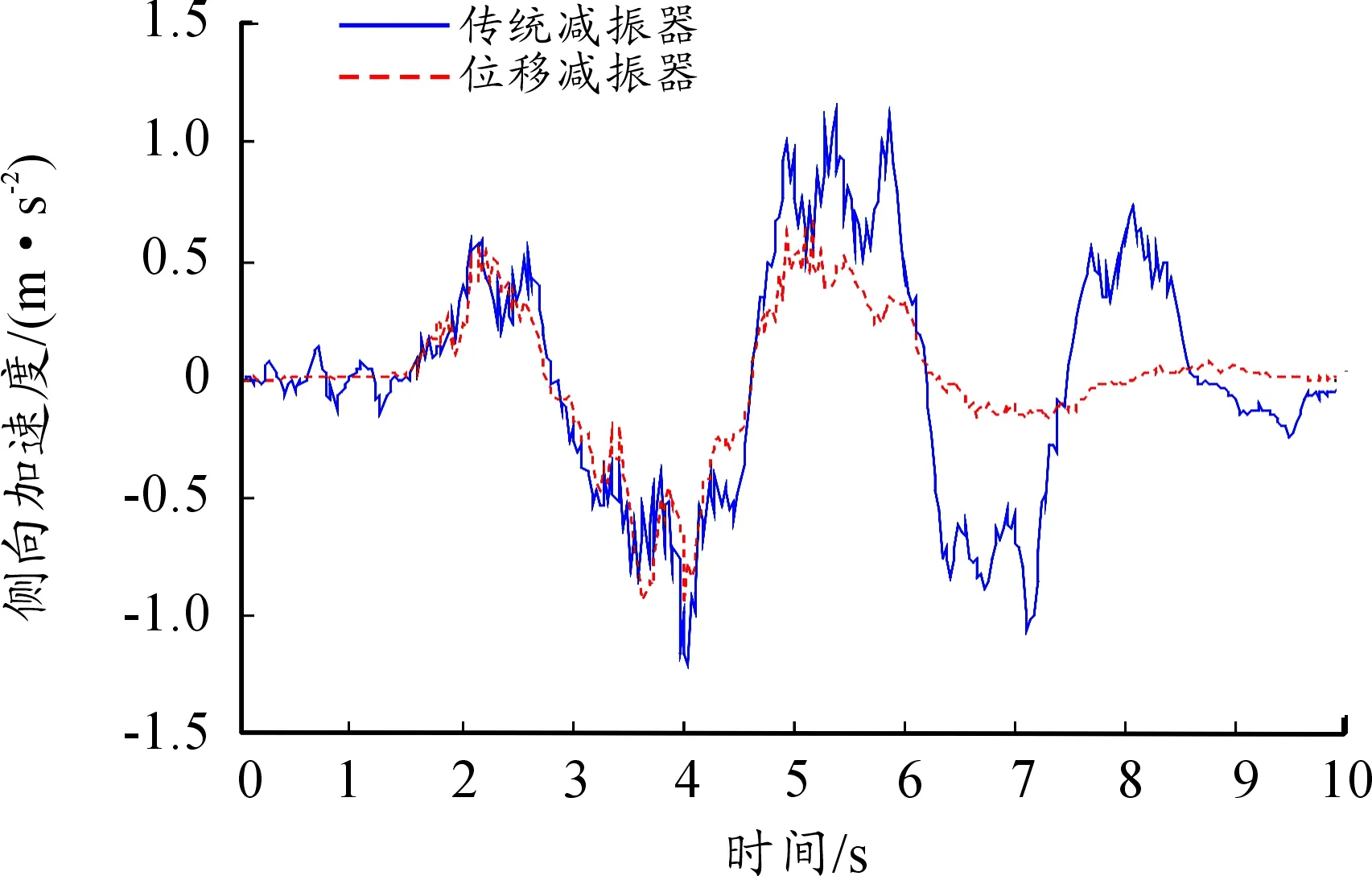
图16 车速为120 km/h时的侧向加速度
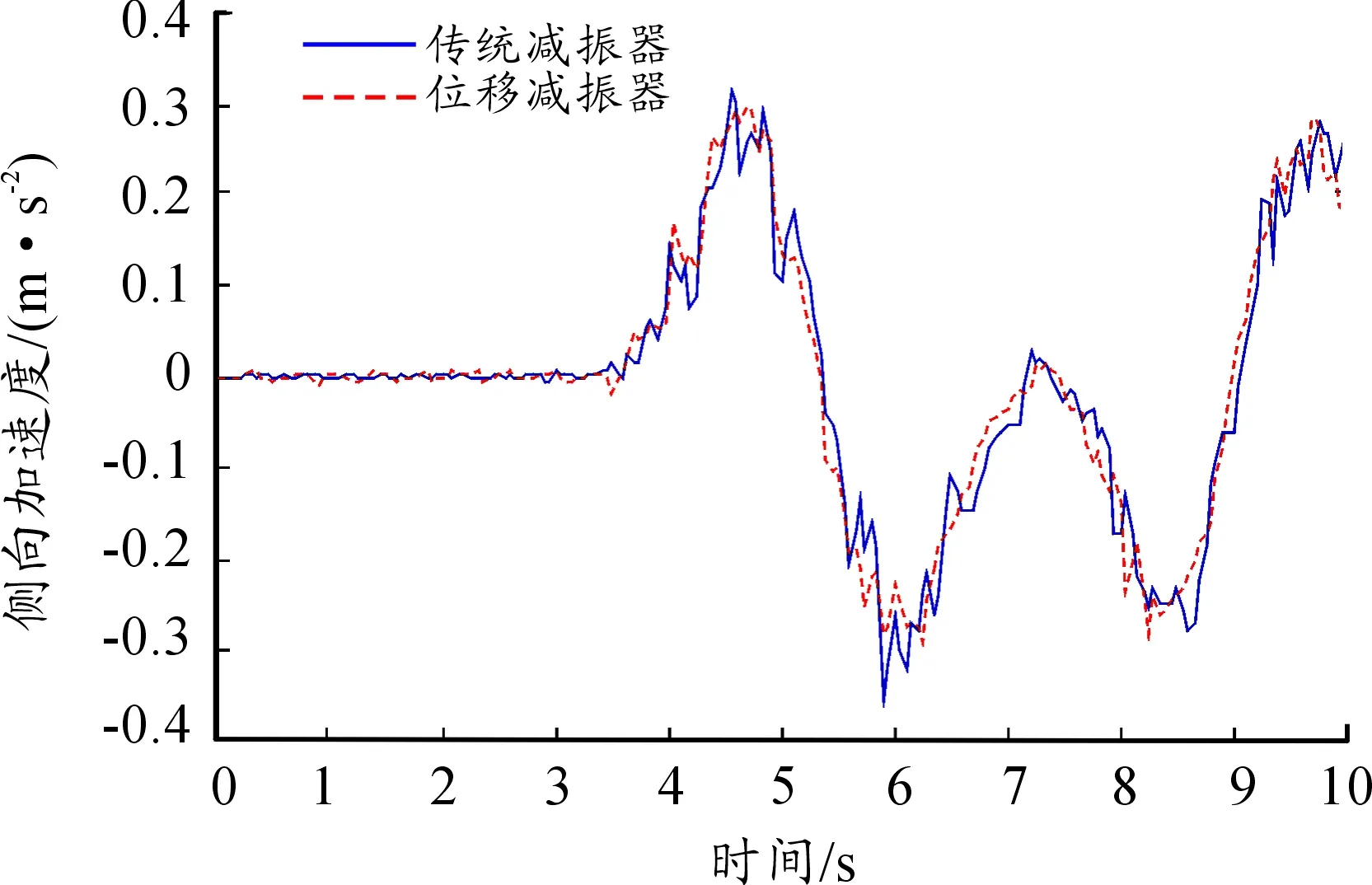
图17 车速为60 km/h时的侧向加速度
由双移线道路下的仿真结果可知,横摆角速度与侧向加速度作为可以衡量操纵稳定性的物理参数,在低速状态下,位移相关减振器在横摆角速度与侧向加速度两个指标上与传统减振器基本一致,但在高速状况下,装有位移相关减振器车辆的横摆角速度与侧向加速度峰值均小于传统减振器,结果表明位移相关减振器在高速状态下能更好地完成双移线道路的行驶,因此具有更好的操纵稳定性。
4 结论
1) 通过分析相关减振器的结构与原理,建立了传统减振器与位移相关减振器的Simulink模型,同时将机械弹性车轮的主要参数导入Carsim,进行了整车联合仿真试验,研究了其对汽车操纵稳定性的影响。
2) 通过2种不同路面工况整车联合仿真的试验,研究分析了位移相关减振器对匹配机械弹性车轮的汽车操纵稳定性的影响。可知与传统减振器相比,在高负荷情况下,装有位移相关减振器车辆的横摆角速度与侧向加速度峰值均较小,具有更好的操纵稳定性。
3) 通过对位移相关减振器对匹配机械弹性车轮的汽车操纵稳定性的影响的研究,可以进一步改善汽车的操纵稳定性,而且其结构相对简单,成本低廉,并能一定程度地提升汽车行驶的平顺性,应用前景广阔。