飞行器执行机构故障的鲁棒容错控制器设计*
2019-03-14李清东
王 伟,李清东
(1.湖南财政经济学院信息技术与管理学院,长沙 410205;2.北京航空航天大学自动化科学与电气工程学院,北京 100083)
0 引言
当飞行器的某个执行机构出现故障后,具有自修复功能的飞控系统的具体任务依次是[1]:
1)由故障检测模块判断是否发生了故障;
2)自动切换至鲁棒性极强的应急控制律,保证飞机短时间内不失控;
3)精确地检测故障,确定故障的位置、性质和程度,即常规的故障检测与识别;
4)根据故障检测诊断的结果,重构控制律,最低要求是保持飞机的稳定,并在此基础上尽可能地恢复原来的操纵品质。
任务2)是后两项任务的前提,任务3)直接为任务4)服务。任务2)应急控制律在自修复飞行控制系统中非常重要,起到了承前启后的过渡作用。其使命就是在故障发生后,故障检测诊断得出结果前的这段时间内保证飞机稳定。
但传统的被动容错控制方法[2-3]和主动容错控制方法[4-5]都无法作为一种应急控制律直接应用于自修复飞控系统。因为被动容错控制是按照系统最“糟糕”的情况设计的,以牺牲系统的性能为代价来换取系统对故障的鲁棒性和容错性。而大部分主动容错控制包括故障检测诊断和控制重构两部分,控制重构部分强依赖于故障诊断结果,一旦故障检测诊断单元出现误检、误判或者有较大的时延,会对控制重构部分起到致命的影响。
近年来,出现了一些可容忍系统不确定性、干扰和故障的强鲁棒非线性控制方法,这些方法都不需要精确的故障诊断结果,而是采用补偿控制的思路,通过估计/观测系统的故障和不确定性,在原有控制器信号上加入补偿控制信号,以抵消故障对系统的影响。归纳起来,常用的方法有基于神经网络或模糊等智能控制方法的故障估计和补偿[6-8],以及基于非线性观测器的故障估计和补偿[9-16]。但这些方法都是基于主控制器的补偿,主控制器和补偿控制器没有完全分开设计,因此,没有形成统一的控制器的结构。
本文在总结归纳现有的故障补偿控制方法的基础上,首先将文献[17]中的线性系统的鲁棒容错控制器结构推广至非线性系统,在此统一的结构下将传统的控制器设计方法融入其中。提出的非线性鲁棒容错控制器由主控制器和补偿控制器组成,两个控制器可单独分开设计。当系统无不确定性、干扰或故障时,仅主控制器作用,保证被控系统具有较高的性能,主控制器可以采用任何现有的控制理论设计;当系统具有不确定性、干扰或发生故障后,启用补偿控制器,在保证闭环系统稳定的前提下尽可能地补偿故障对系统造成的影响。本文设计了PID主控制器和基于扩张状态观测器的补偿控制器,针对飞机方向舵卡死故障进行仿真验证,仿真结果证明了该控制器结构的正确性,同时该控制器增强了飞控系统的鲁棒性,可以作为一种有效的应急飞行控制律使用。
1 执行机构故障模型
由于本文设计的应急鲁棒容错控制器适用于精确得到执行机构的故障诊断结果之前,因此,本文的研究内容适用于具有冗余操纵面的先进布局的飞行器。以带有推力矢量系统[18]的飞机为例建立执行机构故障模型,设计控制器以验证所提方法的有效性。
当飞机发生执行机构故障(主要包括卡死、损伤和松浮)时,飞机受到的力和力矩都会发生变化,力和力矩的变化会引起飞机状态的变化。最先变化的是受到力矩控制的飞机的角速度,其次是受到气动力控制的线速度。但是对比执行机构产生的力矩和力,可以发现,实际上执行机构偏转主要产生力矩,相比之下,其产生的力很小。如果在故障发生的初始阶段,补偿控制器能够提供补偿力矩,稳定系统的同时保证系统具有一定的性能,则受到故障执行机构产生的力影响的飞机状态量变化可以近似忽略。所以本文主要分析飞机角速度回路的动力学模型特性,补偿控制器提供的补偿力矩直接作用于角速度回路,则其余回路受到的故障影响可近似忽略。
带有推力矢量的飞机执行机构故障模型可写为如下仿射非线性系统的形式:


2 控制器设计
2001年,周克敏和任章教授提出一种新型鲁棒容错控制器结构[17],本文将其推广至非线性飞行控制系统,其结构如图1所示。

图1 鲁棒容错控制器
图1中,y*为给定的参考信号,u1为主控制器输出信号,uf为故障执行机构的输入,ucf为补偿控制器信号,y为系统输出,z为非线性状态观测器的输出,ξ为包含故障信息的残差信号。
当系统无故障时,ξ近似为零,补偿控制器ucf近似为零,即不启用推力矢量和不附加副翼偏转信号,只有主控制器u1起作用。当系统执行机构发生故障时,补偿控制器自动启用,在保证系统稳定的前提下,抵消故障对系统的影响。
2.1 主控制器设计
主控制器可用现有的控制理论设计,主要考虑系统的性能指标。对于飞机,在无执行机构故障情况下,飞机纵向和横侧向几乎完全解耦,适合采用经典的根轨迹法设计自动驾驶仪的控制律,本文分别设计了纵向高度控制回路PID控制律,横侧向倾斜姿态控制回路PID控制律。
2.2 基于扩张状态观测器的补偿控制器设计
非线性扩张状态观测器(Nonlinear Extended State Observer,简称 NESO)[19-20]是一种适用于仿射非线性系统的,基于输出误差的非光滑连续校正思想的一种非线性观测器,它不仅能观测系统的状态,还能通过扩张系统状态,观测系统的未知输入干扰,即故障函数[20-21]。
假设非线性系统如下:
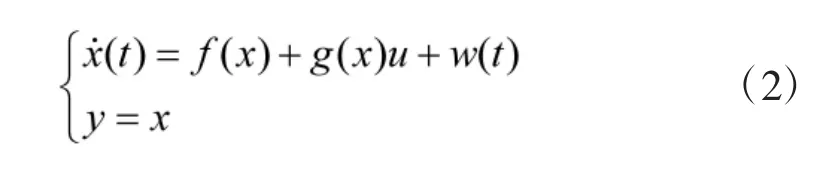
其中,f(x)和g(x)为已知的系统函数,u为控制输入,w(t)为未知干扰。
上述系统可以扩张为:

w(t)为扩张的系统状态x2(t),w(t)及其倒数-v(t)皆是未知的。式(3)相应的观测器为:

式(4)中
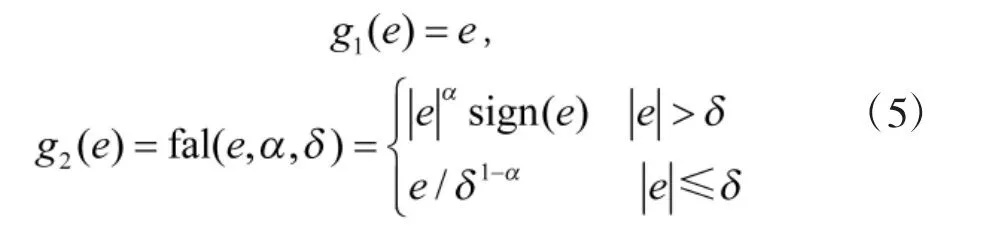
0<α<1,δ为原点附近的用来限制增益的小数。
式(1)包含 p,q,r 3 个角速度变量,以一个回路为例设计补偿控制器。令 w(t)=g(x)uf,式(1)的一个回路可以改为下式:


则补偿控制器可以完全补偿故障输入对系统的影响,因此,补偿控制器的输出为:

利用3个NESO分别估计故障函数,可以得到3组补偿控制信号,即附加的副翼偏转信号和推力矢量喷管偏转信号。
3 仿真验证
仿真的初始条件[20]为:飞行速度264 m/s,高度5 000 m的水平平飞状态。飞机以预定的滚转角φc=15°定高盘旋飞行,1 s后发生方向舵卡死7°故障,仿真结果如图2所示。
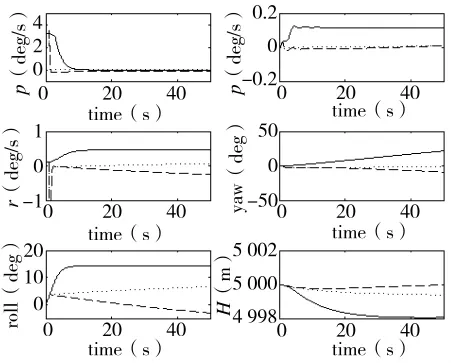
图2 方向舵卡死7°时,飞机状态响应
图2中p,q,r分别表示飞机的三轴角速度,yaw,roll和H分别表示偏航角,滚转角和飞行高度。图2中分别显示了3种情形下的状态响应结果,分别为:
1)无故障时,仅主控制器作用下的状态响应曲线如图中实线所示,飞机按照指令定高盘旋;
2)发生方向舵卡死7°故障后,仅PID控制作用下,系统的状态响应曲线如图2中虚线所示。由图2可知,如果不及时补偿的话,飞机横侧向响应曲线迅速恶化,飞机在短时间内失稳;
3)发生方向舵卡死7°故障后,新型鲁棒容错控制器作用下——主控制器加补偿控制律作用下,系统的状态响应曲线如图2中点线所示。由图2可知,滚转角稳定在10°附近,与正常情况相比系统跟踪性能有所降低,但是系统仍然保持稳定,达到了鲁棒控制的目标,起到了应急控制律的作用。
图3表示由NESO得到的故障估计值。
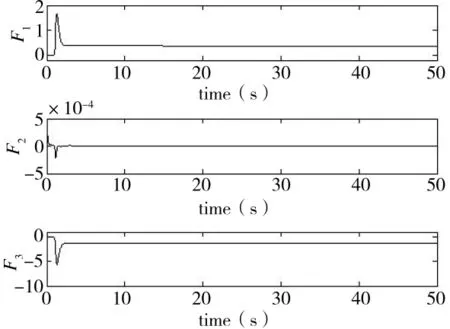
图3 方向舵卡死7°时故障函数估计值
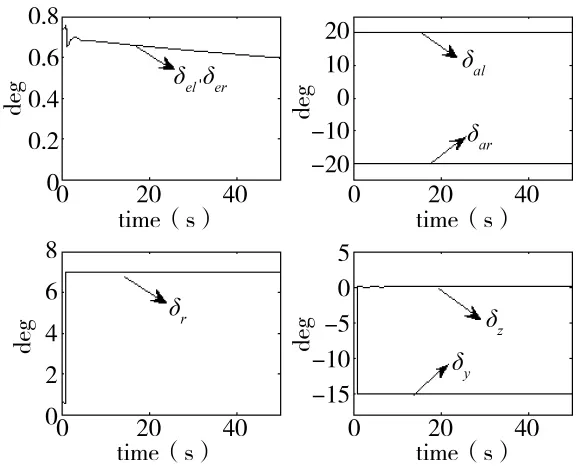
图4 方向舵卡死7°时,舵面偏转
图4为采用新型鲁棒容错控制器时对应的左右升降舵,左右副翼,故障的方向舵以及推力矢量喷管的偏转角度。
仿真验证得到,新型鲁棒容错控制律对于一定程度的方向舵故障具有良好的鲁棒性。进一步验证得到,如果方向舵故障程度大于7°,由于推力矢量和附加的副翼信号的补偿能力有限,即使加入补偿控制信号也无法抑制方向舵卡死对偏航通道产生的巨大影响,系统仍然会发散。事实上,如果系统有足够的冗余执行机构,该问题完全可以避免。
4 结论
本文提出了一种鲁棒容错控制器结构,针对飞行器执行机构故障,采用两步法设计实现了该控制器。主控制器以考虑系统的性能为主设计,基于扩张状态观测器对故障的估计,设计补偿控制器,控制器可以兼顾系统的性能、鲁棒性和容错性。仿真结果表明,该控制器可以作为自修复飞行控制系统的应急控制律使用,同时可以作为下一步精确故障检测诊断的基础。