依赖信号噪声场景下MIMO雷达稳健波形设计*
2019-03-14雷晓艳
雷晓艳
(周口师范学院网络工程学院,河南 周口 466000)
0 引言
受到多输入多输出(Multiple-Input Multiple-Output,MIMO)技术在通信领域成功应用的启发,MIMO概念最近被引入雷达领域,并受到越来越多的关注[1]。与传统的只发射相干波形的相控阵雷达不同的是,MIMO雷达几乎可发射任意波形。根据阵元间距,MIMO雷达可分为以下两类:分置雷达和共置雷达。相较于传统的相控阵雷达,MIMO雷达几乎可发射任意波形,即所谓的波形分集[2]。因而,MIMO雷达比相控阵雷达具有更多的优势,比如参数辨识性[2],灵活的发射方向图设计[3]。
波形设计是MIMO雷达研究领域中非常重要的方向之一,受到越来越多的关注。在目标及环境先验知识确知条件下,Wang H.等研究了通过设计发射波形改善基于MIMO的空时自适应处理(Space-Time Adaptive Processing,STAP)方法的检测性能[4]。Jian L.基于某些准则,比如最小化克拉美-罗界(Cramer-Rao Bound,CRB)的迹等,设计波形以提高场景先验知识完备场景下多个点目标的参数估计性能[5]。Wang H.等则考虑了杂波场景下发射波形和接收权联合优化以改善目标估计性能[6]。明显地,求解上述文献中波形设计问题需要某些参数的确切值,比如到达方向角(Direction-of-Arrival,DOA)等。然而,这些参数在实际应用中须通过估计得到,因而不可避免地存在误差。因此,最终的参数估计性能相应地会受到这些参数估计误差的影响,此现象已在文献[5-6]中通过数值试验验证。
针对上述问题,基于最小化最差情况下(worst-case)CRB迹准则,通过将目标初始参数估计误差凸集包含进波形优化,本文考虑了依赖信号噪声(即杂波)场景下稳健波形优化问题以改善系统参数估计性能对参数初始估计误差的稳健性。在发射功率及参数估计不确定凸集约束下,首先推导了稳健波形优化问题,为求解此复杂非线性问题,本文提出一种基于对角加载(Diagonal Loading,DL)[7]的迭代方法。所提方法首先基于哈达玛不等式(Hadamard’s inequality)[8]将内层优化分解为多个独立子问题,以减少计算复杂度从而利于工程实现,而后基于DL将子问题转化为半定规划问题(SDP)[9],接着通过线性化方法将外层优化转化为凸问题,进而此问题可利用诸如最陡梯度下降法获得高效求解从而方便硬件实现。最后,初始问题的最优解可通过对迭代所得结果的最小二乘(Least Square,LS)拟合得到。
1 问题描述
本文所用MIMO雷达具有Mt个发射以及Mr个接收阵元,且具有任意间距,第i个阵元发射形如的离散基带信号,其中L为快拍数。则,此MIMO雷达发射信号为。如若信号传输没有散布,且目标距离环内杂波可建模为多个独立杂波块的叠加,则MIMO雷达接收信号为:

式中,

观察式(2)~ 式(5),可以看出 CRB 是关于 θ,,Hc以及W的函数。实际上,这些参数须从接收数据中估计得到,从而不可避免存在误差。因此,基于参数估计值得到的估计或检测精度会对参数估计误差比较敏感(参见文献[5]中的数值仿真),这对波形设计在实际工程中应用非常不利。
此外,从式(3)~式(5)可得,CRB依赖于以下关于目标的两项,即。由此,为研究关于目标非确知先验信息条件下的MIMO雷达稳健波形设计,本文将此两项建模如下:

式中,Ak为矩阵 A 的第 k 列;以及分别表示位于θk的目标的发射接收导向矢量;Ak和Bk则表示对应的假设矢量;分别表示和的真实导数;及则为 Ak及 Bk对应的假设导数;式 (9) 中 δk及 γk分别表示如下两项的误差,分属于如下集合:

明显地,CRB的迹,即式(11)是关于 RΦ以及的复杂非线性函数。因此,此问题比较难以利用诸如凸优化[9]等传统优化方法进行求解。
2 所提迭代方法
本节提出一种新的基于DL的迭代方法以求解问题。为此,首先考虑最大化问题式(11)。为求解此问题,将利用如下定理[8]:
定理1:假设M为N×N半正定厄米特矩阵,则如下不等式

成立,当矩阵M为对角阵时上式等式成立。
根据定理1,可将内优化问题式(11)松弛为
基于Khatri-Rao积的定义[8],可重写表示为:
比较式(15)及式(13)可知,基于矩阵不等式,本文将复杂的非线性问题松弛为较为简单的优化问题以减少计算复杂度,从而利于工程实现。

式(17)及式(18)根据如下定理[8]转化为 SDP问题:
根据定理2,式(17)以及式(18)可分别转化为如下SDP:
式中,t为辅助优化变量。
基于式(16),下述命题可将式(11)关于 RΦ的非线性问题转化为线性问题,且将对应约束转化为线性不等式(LMI)。
命题:基于矩阵不等式性质,式(11)中的约束可重写为:

式中,

基于定理2以及上述命题,类似于内层优化,式(11)中的外层优化可重写为如下SDP:
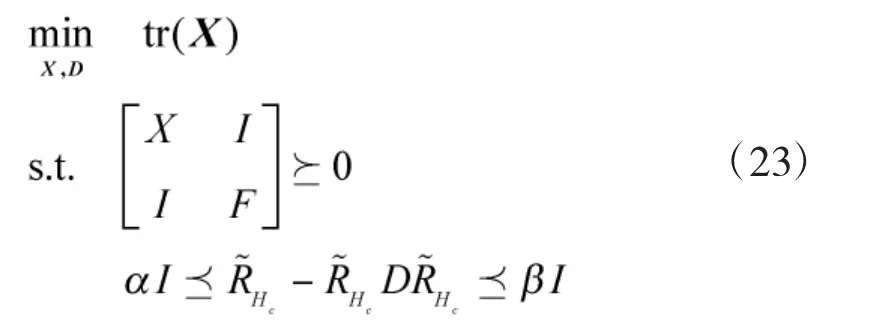
式中,矩阵X为辅助优化变量。
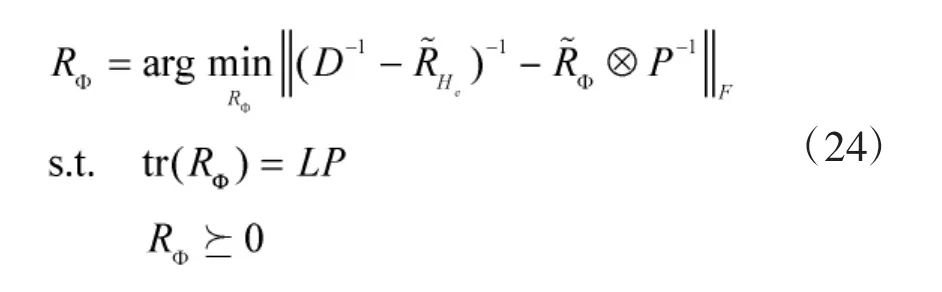
得到D之后,RΦ可通过对之LS拟合得到,即:
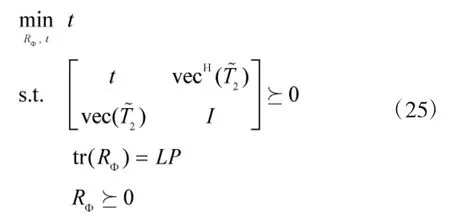
基于定理2,式(24)可重写为如下SDP:
基于上述内外层优化问题的求解,根据文献[11]的算法3,本文可提出一种基于DL的迭代方法以最小化最差情况下CRB。此算法可详述如下:
2)计算式(23)以得到 D;
3)重复1,2直至最差情况下CRB增加不明显。
而后,最优WCM,即RΦ可通过求解式(25)得到。
式(19),式(20),式(23)以及式(25)的最优解可通过文献[12]所提CVX优化工具箱高效求得。
由上述算法步骤可知,所提方法的每一步都可以利用诸如梯度下降法获得最优解,且计算量较小,从而非常便于硬件实现。
3 仿真结果及分析
本节将通过数值仿真将所提方法与文献[4]提出的非稳健方法以及非相关波形相比以验证所提方法有效性。验证着眼于以下3方面:参数估计性能改善,方法稳健性,以及误差取值对CRB的影响。
本仿真环境设置如下:MIMO雷达为线性阵列,且发射接收阵元数分别为Mt=3,Mr=3,且具有如下配置:发射接收阵元间距皆为半波长,记为MIMO雷达1,发射阵元间距为3/2波长,接收阵元间距为半波长,记为MIMO雷达2。假设感兴趣距离单元可等距离划分为NC=10 000杂波单元,且杂噪比(CNR)为30 dB。假设干扰位于-5°,且干噪比(JNR)为60 dB,具有单位幅度的目标位于θ=20°,采样数为L=256。根据第2部分可知,计算CRB须基于初始参数估计。此估计可通过文献[13]中所提方法得到。
仿真将在初始角度估计误差场景中验证所提方法性能。假设存在如下角度估计不确定性:,即,式 中为 θ的估计。经过计算,可得MIMO雷达1条件下,而MIMO雷达条件下。
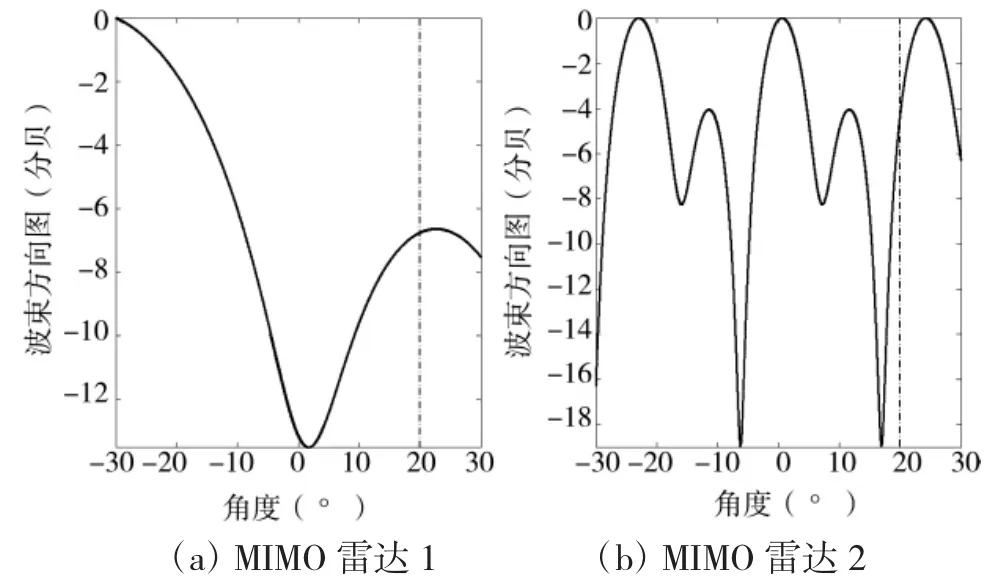
图1 ASNR=10 dB条件下所提方法得到的最优发射方向图
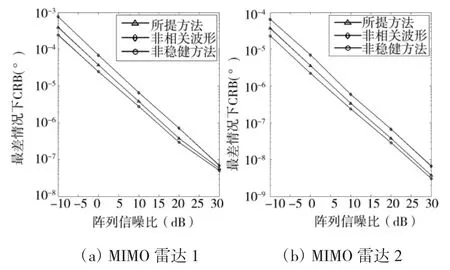
图2 worst-case CRBs随ASNR变化
由所提方法、非稳健方法以及非相关波形得到的平均worst-case CRB随ASNR变化而变化如图3所示(100次蒙特卡洛试验)。由图3可知,所提方法得到的worst-case CRB优于非稳健方法以及非相关波形,换言之,所提方法有着针对δ及γ更好的稳健性。

图3 worst-case CRB随ASNR变化而变化
此外,ASNR=10 dB条件下,所提方法及非相关波形所得最差情况下CRB随不确定边界变化如图4所示。由图可知,此两种方法所得最差情况CRBs随ζ或 增加而增加,此结论类似于文献[10]所述。
4 结论
基于CRB,本文考虑了杂波条件下目标先验信息不确知,且位于凸不确定集场景下改善最差情况下MIMO雷达参数估计性能的稳健波形设计问题。为求解所得复杂非线性问题,本文提出一种新的基于DL的迭代方法,以求解此NP问题,从而优化WCM进而获得较好的最差情况下参数估计性能。迭代中的每一步都可转化为SDP问题,因而可以通过诸如梯度下降法获得高效求解,从而利于硬件实现。初始问题的最优解可以通过对由迭代算法得到的解进行最小二乘拟合得到。数值仿真通过与非稳健方法以及非相关波形的比较,验证了所提方法的有效性。