无人机数码航空影像大比例尺地形图测绘可行性研究
2019-02-26杨志胜
杨志胜
(福州市勘测院 福建福州 350108)
0 引言
无人机作为一种新型的低空遥感对地观测手段,对传统遥感技术具有重要补充作用[1]。相比于通过卫星遥感及大飞机数码航摄等技术方式,无人机获取地面影像主要具有以下几个方面的优点:
(1)无人机相关设备组装简单,易于操控,机身轻便,方便存储和运输。
(2)生产成本较低,获取影像周期短,大幅提高工作效率。
(3)空域管制条件相对宽松,作业机动性强。但是由于无人机机身重量较轻,翼展较小,实际作业过程中,飞行姿态容易受到侧风影响,导致所获取的影像数据横滚、俯仰等姿态角过大,并且获取的影像数据存在的镜头畸变,对后期空三加密的干扰很大,直接影响3D产品(DLG、DEM、DOM)的精度。
鉴于无人机以上优缺点,无人机数码航摄影像能否用于大比例尺地形图测绘,是否满足相关规范要求的精度指标,这个问题一直以来受到整个测绘行业专家学者的强烈关注[2-5],为此,本文利用无人机影像数据,进行相关测试,以此验证无人机数码影像生产大比例尺地形图测绘的可行性。
1 基于无人机影像地形图测绘
利用无人机数码航摄影像,测绘大比例尺地形图,总体可以分为以下几个步骤:数码航摄、影像预处理、空三加密、DLG采集、调绘编辑成图,如图1所示。
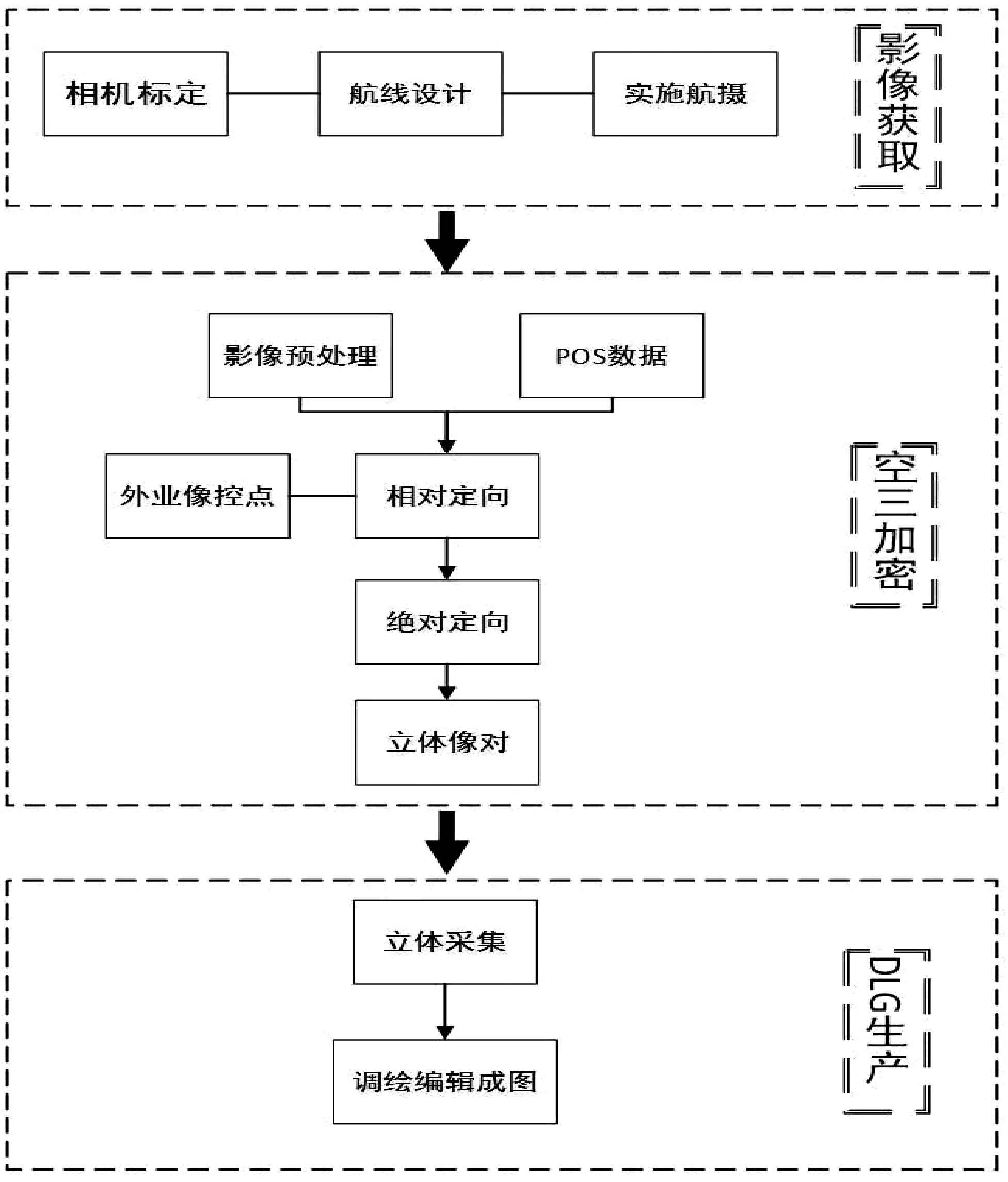
图1 基于无人机影像地形图测绘流程
1.1 影像获取
目前大部分的无人机飞行器荷载重量在1kg以下,搭载相机类型以微单及卡片式相机为主,需要定期进行相机标定,以保证相机参数的准确性。在进行航线设计时,根据航摄分辨率、航向重叠度及旁向重叠度要求,结合相机焦距、像元尺寸等参数,计算相对航高、基线长度及旁向间隔等飞行参数[2-3]。实施航飞前,对航飞区域进行踏勘,选择合适的起降场地,尽量在无风情况下完成无人机起降操作,飞机降落后,提取航摄影像数据及对应POS数据。
1.2 空三加密
通过无人机数码航摄方式获取的原始影像数据存在比较大的镜头畸变,进行空三加密前,根据相机参数,利用相关软件平台消除影像畸变。POS数据是影像最初的外方位元素参数,包含像主点空间坐标及影像姿态参数,可以用于辅助创建加密测区及参与空三计算。相对定向是指通过影像匹配,提取所有影像对之间的同名点,以此恢复每一像对两张像片在曝光瞬间的相对位置关系。在区域网平差结果的基础,通过加入外业像控点,将区域网平差结果纳入到最终的物方坐标系下,完成测区绝对定向工作。
1.3DLG生产
测区经过空三加密之后,输出经过平差解算后的影像外方位元素,以此构建立体像对,然后在立体像对上采集数字线画图,按照地形图图式及各大类地形地物表示要求,经过外业调绘及内业编辑处理后形成最终的地形图成果。
2 试验结果及精度分析
2.1 测区概况
该次试验的测区为城市中的建筑区域,属于平地地形,测区中地物类型以居民地建成区为主,面积约1.5km2,通过固定翼电动无人机数码航摄方式共获取测区约150张航片,其地面分辨率(GSD)为5cm,航向重叠度为80%,旁向重叠度为65%。按照航向5条基线,旁向隔一条航线进行布设,总共布设了24个像控点,其中平高点18个,检核点6个,像控布点如图2所示。

图2 像控布点略图
2.2 精度结果及分析
在测区范围内选取了122个特征明显的地物点,作为地形图平面检测的标准,地物点类型包括道路拐角点、房屋角点、围墙拐角点、花圃拐角点及路灯等,此外,利用全站仪实测检核点坐标,采集坐标与实测坐标对比如表1所示。高程精度检核,选取122个主干道路上地形起伏平缓处的高程点作为标准,首先通过立体量测对应点高程值,然后利用三角高程测量及RTK实测对应高程值,两者对比情况如表2所示。选取81条边采用激光测距仪量测边长,与采集到的地物边长进行对比情况如表3所示。
《1∶500 1∶1000 1∶2000地形图航空摄影测量数字化测图规范》[4]对数字线划图(DLG)平面精度如表4所示,高程精度要求如表5所示。

表1 平面精度统计表
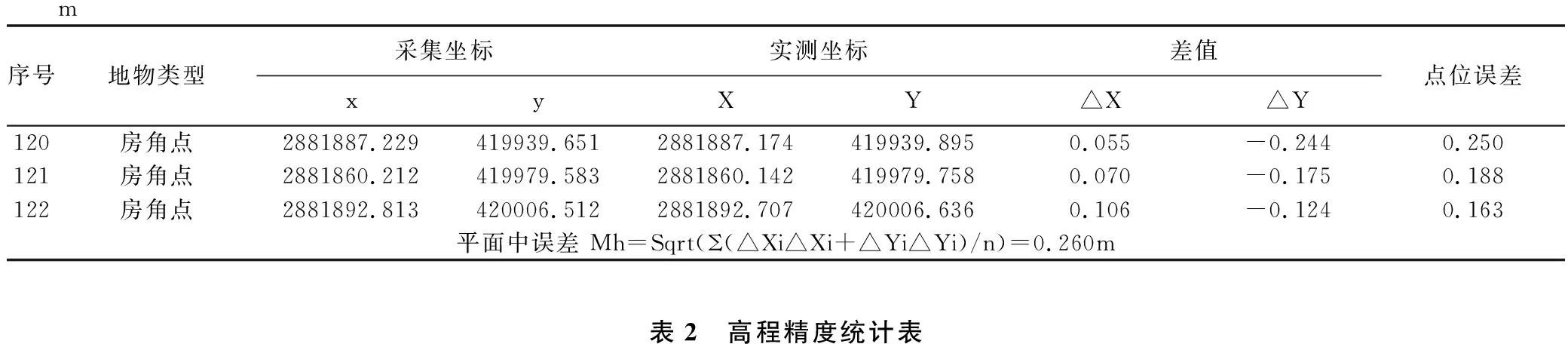
m序号地物类型采集坐标实测坐标差值xyXY△X△Y点位误差120房角点2881887.229 419939.651 2881887.174 419939.895 0.055 -0.244 0.250 121房角点2881860.212 419979.583 2881860.142 419979.758 0.070 -0.175 0.188 122房角点2881892.813 420006.512 2881892.707 420006.636 0.106 -0.124 0.163 平面中误差 Mh=Sqrt(Σ(△Xi△Xi+△Yi△Yi)/n)=0.260m表2 高程精度统计表

m序号采集高程实测高程差值hH△H序号采集高程实测高程差值hH△H17.532 7.808 -0.276 628.786 8.972 -0.186 28.443 8.220 0.223 638.486 8.699 -0.213 37.909 8.075 -0.166 648.778 8.974 -0.196 47.383 7.289 0.094 658.819 8.993 -0.174 57.763 7.443 0.320 668.783 8.974 -0.191 67.902 8.318 -0.416 678.347 8.609 -0.262 78.608 8.821 -0.213 688.214 8.412 -0.198 87.365 7.206 0.159 698.413 8.623 -0.210 97.879 7.686 0.193 708.303 8.107 0.196 108.583 8.211 0.372 718.421 8.243 0.178 117.446 7.283 0.163 728.001 8.144 -0.143 127.523 7.856 -0.333 737.907 7.989 -0.082 137.815 8.105 -0.290 748.062 8.259 -0.197 149.359 9.035 0.324 758.048 8.241 -0.193 158.336 8.116 0.220 768.221 8.356 -0.135 168.563 8.239 0.324 778.107 8.264 -0.157 177.713 7.956 -0.243 788.182 8.341 -0.159 189.398 9.116 0.282 798.457 8.663 -0.206 197.889 7.639 0.250 808.234 8.461 -0.227 208.833 8.893 -0.060 818.313 8.426 -0.113 218.892 8.536 0.356 828.257 8.443 -0.186 227.633 7.869 -0.236 838.325 8.431 -0.106 239.336 9.026 0.310 847.634 7.812 -0.178 248.528 8.443 0.085 857.607 7.801 -0.194 257.350 7.633 -0.283 867.887 7.821 0.066 268.164 8.410 -0.246 877.621 7.803 -0.182 278.753 8.529 0.224 887.594 7.726 -0.132 288.884 8.720 0.164 897.218 7.438 -0.220 298.997 8.776 0.221 907.151 7.319 -0.168 309.018 8.843 0.175 917.103 7.248 -0.145 319.084 8.895 0.189 927.011 7.263 -0.252 328.887 8.774 0.113 937.574 7.756 -0.182 339.282 9.052 0.230 947.026 6.832 0.194 348.593 8.421 0.172 957.154 6.971 0.183 358.681 8.523 0.158 966.906 6.621 0.285 367.001 7.236 -0.235 976.523 6.321 0.202 377.089 7.221 -0.132 986.407 6.258 0.149 388.015 7.876 0.139 997.689 7.521 0.168 397.726 7.871 -0.145 1007.778 7.583 0.195 407.434 7.625 -0.191 1018.452 8.621 -0.169 417.397 7.622 -0.225 1028.408 8.245 0.163 427.323 7.201 0.122 1038.003 8.181 -0.178 437.288 7.211 0.077 1047.895 8.023 -0.128 447.354 7.234 0.120 1057.996 8.211 -0.215 457.347 7.219 0.128 1068.138 7.995 0.143 467.886 7.692 0.194 1078.297 8.130 0.167 477.946 7.771 0.175 1088.371 8.214 0.157 487.584 7.820 -0.236 1098.500 8.321 0.179 续表2

m序号采集高程实测高程差值hH△H序号采集高程实测高程差值hH△H497.846 7.992 -0.146 1108.277 8.411 -0.134 508.219 8.011 0.208 1118.584 8.423 0.161 518.041 8.231 -0.190 1128.688 8.536 0.152 527.994 8.190 -0.196 1138.226 8.256 -0.030 538.112 8.243 -0.131 1148.014 7.789 0.225 548.106 7.952 0.154 1158.009 7.791 0.218 558.373 8.161 0.212 1167.648 7.753 -0.105 568.358 8.165 0.193 1177.588 7.684 -0.096 578.373 8.164 0.209 1187.357 7.551 -0.194 588.558 8.352 0.206 1197.817 7.979 -0.162 598.326 8.148 0.178 1207.583 7.823 -0.240 609.214 9.021 0.193 1217.486 7.654 -0.168 618.863 8.671 0.192 1227.392 7.588 -0.196 高程中误差 Mv=Sqrt(Σ(△Hi△Hi)/n)=0.200m表3 边长精度统计表

m序号采集边长实测边长差值lL△L序号采集高程实测高程差值lL△L14.647 4.795 -0.148 427.377 7.377 0.000 220.271 20.507 -0.236 435.238 5.039 0.199 31.412 1.558 -0.146 4411.437 11.181 0.256 43.478 3.600 -0.122 455.584 5.772 -0.188 518.374 18.612 -0.238 4611.403 11.159 0.244 615.004 15.238 -0.234 476.321 6.107 0.214 718.479 18.722 -0.243 484.424 4.645 -0.221 811.989 12.137 -0.148 4917.186 17.032 0.154 915.732 15.938 -0.206 5012.318 12.488 -0.170 106.074 6.250 -0.176 512.546 2.695 -0.149 111.712 1.868 -0.156 525.558 5.771 -0.213 129.264 9.462 -0.198 536.397 6.646 -0.249 137.338 7.535 -0.197 545.213 5.018 0.195 146.783 6.962 -0.179 5511.402 11.141 0.261 156.308 6.497 -0.189 569.583 9.499 0.084 163.203 3.020 0.183 5718.242 18.485 -0.243 1710.276 10.482 -0.206 586.337 6.554 -0.217 1810.222 10.430 -0.208 593.687 3.763 -0.076 1923.504 23.802 -0.298 603.586 3.495 0.091 2019.537 19.788 -0.251 615.018 5.216 -0.198 215.321 5.145 0.176 624.425 4.614 -0.189 2210.413 10.357 0.056 6317.267 17.563 -0.296 238.347 8.155 0.192 646.674 6.864 -0.190 2411.624 11.473 0.151 656.293 6.141 0.152 251.804 1.879 -0.075 667.303 7.104 0.199 264.629 4.823 -0.194 674.696 4.833 -0.137 2712.496 12.676 -0.180 681.327 1.408 -0.081 284.023 4.201 -0.178 695.339 5.524 -0.185 291.997 1.912 0.085 7012.507 12.695 -0.1883011.284 11.503 -0.219 716.732 6.537 0.195 315.412 5.605 -0.193 7212.591 12.285 0.306 321.289 1.232 0.057 7315.762 15.938 -0.176 333.278 3.331 -0.053 7419.123 19.314 -0.191 344.834 4.676 0.158 7515.394 15.238 0.156 358.217 8.063 0.154 7618.514 18.722 -0.208 361.084 1.201 -0.117 773.782 3.601 0.181 373.782 3.965 -0.183 787.979 7.805 0.174

m

表4 平面位置精度要求 m

m
注:比例尺1∶500
综合表1、表4可知,根据国标《1∶500 1∶1000 1∶2000地形图航空摄影测量数字化测图规范》,1∶500地形图航空摄影测量数字化测图在平地及丘陵地的平面位置中误差应达到图上0.6mm,即0.3m。本次基于无人机数码影像DLG成图试验平面检核精度为Mh=0.260m,平面精度可以满足1∶500比例尺数字化测图精度要求。
综合表2、表5可知,根据国标《1∶500 1∶1000 1∶2000地形图航空摄影测量数字化测图规范》,1∶500地形图航空摄影测量数字化测图在平地的高程中误差应小于0.2m,本次基于无人机数码影像DLG成图试验高程中误差为Mv=0.200m,满足《1∶500 1∶1000 1∶2000地形图航空摄影测量数字化测图规范》精度要求。
但根据行业规范《城市测量规范》中1∶500成图的平面位置中误差的要求为0.175m,高程精度要求小于1/3等高距,即≤±0.167m。该次试验平面位置与高程精度尚未满足《城市测量规范》的要求。
3 结语
本文通过实际试验,验证说明了基于无人机数码航摄影像进行1∶500比例尺地形图测绘的可行性,通过试验,基于无人机数码航摄大比例尺地形图测绘,得出以下两点结论:
(1)按《1∶500 1∶1000 1∶2000地形图航空摄影测量数字化测图规范》的要求,平面精度与高程精度均能符合1∶500数字化测图的要求。
(2)按《城市测量规范》的要求,平面位置与高程精度尚不能满足1∶500成图精度要求。由于前者为国标,后者为侧重野外实测的行业规范,可以认为无人机数码航摄影像可用于1∶500比例尺地形图测绘,但仍需改进以提高精度,使之也符合《城市测量规范》的要求。
针对基于无人机数码航摄影像生产1∶500比例尺地形图,需要满足 《城市测量规范》中1∶500成图精度要求等问题,后续工作考虑从以下几个方面进行改进:
(1)优化航线布设方案,利用构架航线提升像控高程控制精度;
(2)考虑后期利用动态测量数据后处理PPK(Post Processing Kinematic)技术提高数码影像POS数据位置准确性,从而进一步提升空三加密成果精度。
