面向最小EEOI的船舶航速矩不确定分布鲁棒优化
2019-02-24徐海军卢昌宇
徐海军, 李 伟, 卢昌宇, 刘 勇
(大连海事大学 航海学院, 辽宁 大连 116026)
国际海事组织(International Maritime Organization,IMO)规定标志船舶能效的重要指标——船舶能效营运指数(Energy Effciency Operation Index,EEOI)于2011年强制实施。[1]该指数表示每单位船舶运输所创造的社会效益(货运量)而产生的环境成本(CO2排放量)。EEOI的强制执行促使航运业加快节能减排工作的步伐,也对船舶的管理和操作提出更高要求。从营运的角度出发,主机转速与航速直接相关,而航速与船舶的航行阻力、燃油消耗和营运效率等因素相关。因此,通过寻找最优主机转速来实现航速优化是降低EEOI的重要方式。
陈前昆等[2]考虑水流速度对油耗的影响,利用实测数据确立主机油耗与航速关系模型,进行基于EEOI的内河船舶航速优化研究。霍得利[3]通过航线分段和分段航速优化,以追求航次总油耗量最低为目标的方法来研究船舶航次内的节能性。HOU[4]从船型优化的角度考虑航速摄动的影响,对低EEOI的最小船型设计方法进行研究。NORLUND等[5]考虑航速、时间表与船队规模等3个要素对最优能效的影响,对补给船进行节能减排研究。这些研究表明:EEOI与航速、主机及水道环境等因素密切相关,通航环境作为船舶自身条件以外的客观因素构成的系统,水深与风、浪、流的强弱等要素都会直接或间接地影响船舶的运动状态,从而改变EEOI数,然而现有做法是将各参数作为确定值直接参与计算,未考虑参数波动引起的影响。
由于受到河道宽窄及河床冲淤等条件影响,河道水流速度通常是不稳定的变化值[6],仍将其作为定值参与计算将使结果产生误差,该误差虽然在多数情况下数值较小,但在优化计算中,持续的迭代与相互耦合可能使最终结果产生较大的偏差。因此,将流速以不确定性的随机变量形式参与计算更具合理性,且应考虑其分布的期望和方差的不确定性。该方法在以高能效为目标图像的航速优化领域尚属空白。
鲁棒优化方法是常用的不确定性问题处理方法[7],其假设不确定参数组成一个集合,针对集合内最恶劣的情况构建一个min-max优化模型,但此类方法没有利用可获取的概率统计信息。近期数学领域发展的矩不确定分布鲁棒优化方法(Distributional Robust Optimization under Moment Uncertainty, DRO-MU)[8]假设随机变量的矩(期望、方差等)属于一个盒式或椭球式的不确定集,以此为基础建立鲁棒优化模型,采用拉格朗日对偶原理将NP难min-max问题转换为半定规划问题以便求解,并通过在电力系统的应用验证其有效性。[9]侯远杭等[10]将DRO-MU模型引入船舶舱室布局设计问题中,较好地处理环境载荷等不确定参数的确定性转化与分析。
本文以文献[2]推导的EEOI模型为基础,考虑多航段内水流速度的不确定性分布,以各航段的主机转速作为设计变量,航程时间与航速限阈作为约束条件,构建以最小EEOI为目标的优化模型,其中明确主机转速与单位时间油耗量、对水航速等的对应关系。引入DRO-MU理论,采用拉格朗日对偶原理将优化模型转为确定的半定规划问题以便求解。算例验证本文方法的合理性与优越性,该方法针对性地用于解决含矩不确定参数的最小EEOI航速优化设计问题。
1 矩不确定分布鲁棒优化方法
鲁棒优化通常面向优化模型中的约束条件或目标函数中参数的不确定性,是解决内部结构或外部环境不确定情况的一种优化方法,常规的鲁棒优化模型[8]为
(1)
式(1)中:x为设计变量;ξ为随机变量;S为不确定集,即随机变量的分布空间;f为目标函数;g为约束条件。
鲁棒优化方法将参与计算的不确定参数描述为不确定集,常见的有盒式不确定集和椭球式不确定集等。DRO-MU将随机规划与鲁棒优化相结合,本文以随机变量的两个重要距(期望和方差)的不确定集为基础进行优化求解,可构建为一个min-max问题,模型为

(2)
式(2)中:F为随机变量ξ的分布;B为随机变量矩的不确定集;E为求期望。式(2)是一个典型的NP难min-max问题,求解较为困难,可利用拉格朗日对偶原理将其转换为确定性的凸半定规划问题。
2 EEOI推导与确定性优化
2.1 公式推导
EEOI用船舶CO2排放量与货运能力的比值来描述,与船舶的燃料消耗、主机功率、载重吨和航行里程等因素相关。计算为[1]
(3)
式(3)中:i为航段标号;j为燃料种类;FCij为船舶在航段i中消耗燃料j的总量;CFij为CO2排放因子,mcargo为载货(人)量;Di为航段i的航行里程。
IEEOI值越小表示在特定航行里程与载货量的情况下,船舶能耗越低,即船舶的营运能效越高。为推导方便,忽略次要因素,可将航段i的燃料消耗FCi近似取为主机油耗,可表示为

(4)
式(4)中:Q为单位时间的主机油耗量;Ti为该航段的航行时间;vsi为船对地速度;v0为船对水速度,vw为水流速度;用“±”来区分上下水;C1为系数,表示为
(5)
式(5)中:Ct为船体总阻力系数;ρ为水密度;S为船体湿表面积;ηd为船舶推进效率;ηs为轴系传动效率;be为主机燃油消耗率。
C1可通过船舶出厂时的设计参数获得,也可由实测数据进行拟合而求得。航段i内的船舶对水速度v0i存在与主机转速ni的函数关系,通常可由线型拟合来表示[2]
v0i=αni+β
(6)
式(6)中:α、β为拟合系数。
综上,可推导出IEEOI与主机转速的关系式为
(7)
式(7)中:m为航段总数。
2.2 确定性优化
通过对各航段的船舶主机转速ni的优化选取,来实现对应的EEOI最小化,因此优化设计变量确定为ni(i=1,2,…,m)。考虑船舶主机的运转条件需求,转速须在一合理区间内变化:[nmin,nmax],即形成设计空间。

1) 优化目标Min IEEOI2) 设计变量各航段的主机转速ni(i=1,2,…,5),[400,720](r/min)3) 约束条件总航程时间 ti≤t0=130(下水) or 240(上水) (h);船舶航速 6.9≤vsi≤21(km/h)4) 确定性参数水流速度 vwi:[5.6,4.9,4.3,3.6,2.8](km/h);航程距离 Di:[671,612,433,305,330](km);拟合系数 C1:0.043,α:0.025 3,β:1.326 3;载货量 mcargo:325(TEU);碳转换系数 CF:3.2065) 算法和参数ASA预设迭代步数:1 000;相对退火速率:1.0;相对淬火速率:1.0;初始温度:1.0;再退火方案数:100
为保证船舶运行安全与营运效益,需考虑如下两方面约束条件:
(1) 整个航程的时间不可超出预定限制T0;
(2) 船舶的航速要介于极限功率航速vmin与最大设计航速vmax之间。
利用自适应模拟退火算法(Adaptive Simulated Annealing,ASA)[11]进行寻优计算,将各参数作为确定性指标,以文献[2]的参数值为参考,建立EEOI确定性优化模型。
分别考虑下水和上水两种工况,经约1 000步迭代计算求得最优方案,目标值的优化进程曲线见图1。由图1所知:两种工况的前200步迭代目标值波动较大,处于全空间探索状态,之后渐趋平稳,到达预设的约1 000步时已达收敛稳定状态,从而得出较为可信的最优方案。
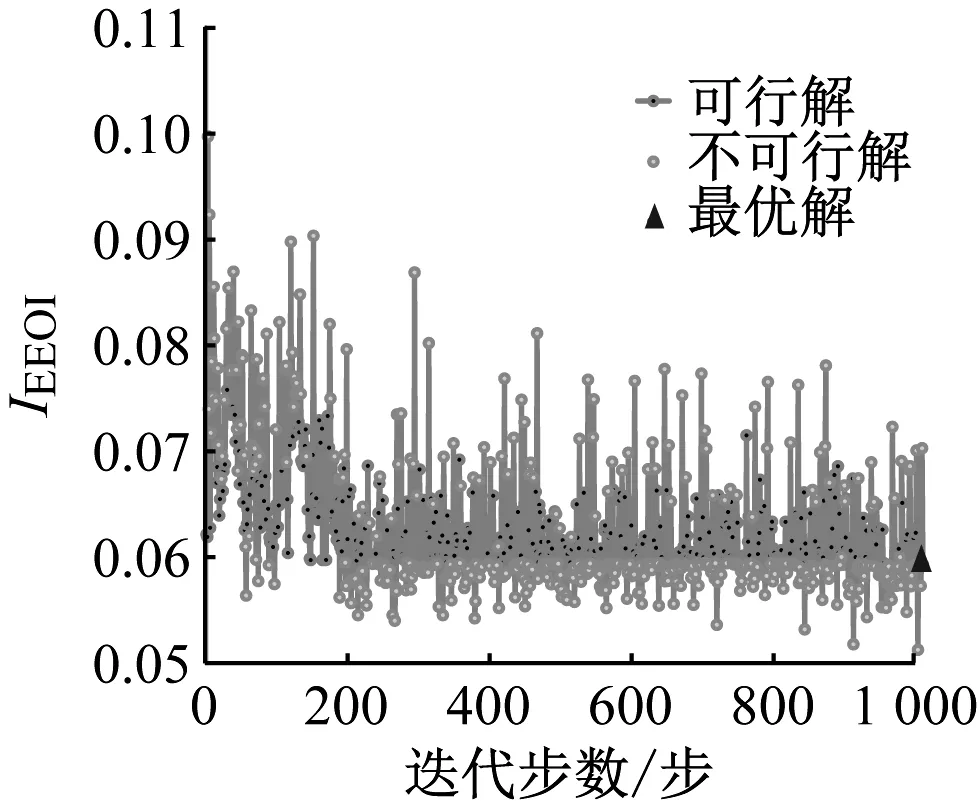
a) 下水工况

b) 上水工况图1 两种工况的EEOI确定性优化迭代进程曲线
将初始方案与求得的最优方案对比(见表1)。
由表2所知:优化前后的航行时间均在限定的范围内,经过寻优计算可将EEOI降低,从而可由确定性的角度提高船舶营运能效水平,但该过程未考虑参数的不确定性影响,使结果对参数波动的稳健性无法保证。
3 DRO-MU建模
3.1 灵敏度与随机性分析
在实际情况下,由于水流速度通常是不稳定的变化值,仍将其作为定值参与计算将使结果产生误差,为探寻其对优化目标EEOI影响的灵敏度,采用拉丁超立方法(LATIN H,LH)进行各航段的水流速度vwi对EEOI的灵敏度分析。水流速度vwi的取样空间设定为前述固定值的10%扰动邻域,即[90%vwi,110%vwi]。LH取样方案数为5 000,经过相应次数的计算,得到两种工况下各参数对目标EEOI的影响效应曲线见图2;两种工况下各参数的Pareto贡献率见图3。

a) 下水工况

b) 上水工况
图2 两种工况的各参数影响效应曲线

a) 下水工况
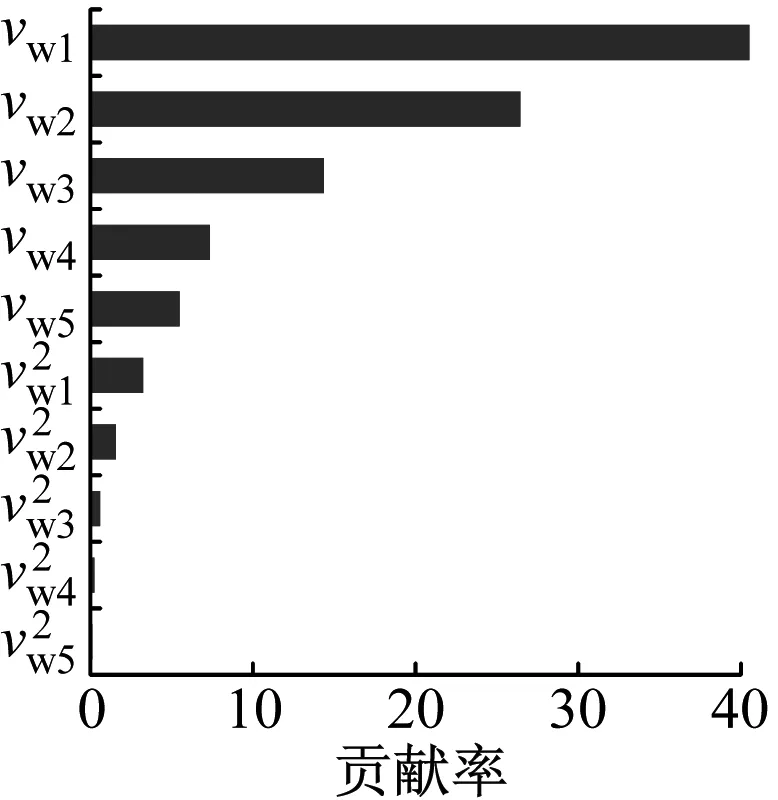
b) 上水工况
图3 两种工况的各参数Pareto贡献率

参考长江航道枯水季与丰水季水流速度的统计规律,可假设上水(下水)的水流速度近似服从正态分布,且其标准差与均值直接相关,为简化计算,将设定模拟参数水流速度vwi服从正态分布,均值为确定性优化模型中设定的固定值,标准差为均值的1%。两种工况的Monte-Carlo模拟结果见图4。

a) 下水工况

b) 上水工况图4 两种工况Monte-Carlo模拟结果
由图4可知:两种工况的EEOI均存在于均值附近波动的情况,且分布规律亦大体服从正态。由此水流速度的随机扰动构成对设计目标的不确定性影响,继而增强结果的不稳定性,因此,考虑不确定性参数的影响对于寻求最优EEOI的优化问题具有重要意义。
3.2 水流速度的DRO-MU表达
考虑水流速度vwi的不确定性,将其看作期望与方差为不确定集的随机变量,分别建立期望的椭球不确定集与方差矩阵不等式限定的半定锥不确定集为
(8)
式(8)中:μi为表征流速分布的随机变量的期望列向量;σi为方差矩阵;γ1为期望的椭球不确定集半径限制参数,且γ1≥0;γ2为方差的半定锥不确定及范围限制参数,且γ2≥1。
3.3 目标的DRO-MU表达与对偶转换
DRO-MU方法建立在随机规划求期望基础上,由于优化模型中水流速度为随机变量,故先要对目标函数求期望。然后应用鲁棒优化原理构建一个min-max问题,体现参数期望和方差的不确定集范围内,最大期望目标函数所做的一个最小的优化计算,即在最恶劣的情况下进行的最优化计算为
(9)
目标函数式(9)是一个NP难的min-max模型,采用拉格朗日对偶原理可将其转换为确定性的凸半定规划问题,可有效求解[9]为
(10)
式(10)中:Q、q为对偶变量,满足Q≥0;r、t为松弛变量;“·”为Frobenius积;“≥”为半定。即通过对偶转换,将目标函数含随机变量的鲁棒优化转换成了求解松弛变量r、t之和的最小值,方便求解。
4 DRO-MU求解
相关的参数设置为:水流速度矩不确定性分布的μi与σi取为第3.1节Monte-Carlo模拟的设定值,椭球与半定锥不确定集参数γ1、γ2分别取0.5、0.3。利用ASA算法求解式(10)。
经过优化计算,得到最小EEOI的DRO-MU航速优化结果,将确定性与不确定性优化结果进行对比(见表2)。

表2 航速优化方案对比
由表2所知:采用确定性优化与DRO-MU优化均能在约束范围内改善船舶EEOI能效特性,但仍存在差异:
1) 两种不同不确定集半径(γ1、γ2)取值的DRO-MU优化结果均稍劣于确定性优化结果,原因在于前者考虑了流速的随机波动与其矩的不确定性,使设计工况更接近真实情况,得出的结果虽较确定性优化差,但具有更强的环境鲁棒性。
2) 不确定集半径值(γ1、γ2)的变化对结果亦有影响,由于该值表达为不确定集的范围限制参数,因此其越小,所包含的不确定性信息越少,即所能描述的不确定集越精确,从而设计工况越接近确定性优化。因此,较小的半径会得到较优的EEOI,但相应的鲁棒性会变差。
5 结束语
本文考虑水流速度的不确定性影响,针对其随机性对设计目标进行灵敏度与随机性分析,然后采用DRO-MU进行最小EEOI航速优化设计。计算结果表明:该方法能在约束范围内有效改善船舶的EEOI能效特性,且能更好地反映真实情况,更具合理性与优越性。然而,所应用的流速分布为单纯的参数化概率模型,未以实际水道环境为背景采集与分析数据,与实际情况尚有一定偏差。因此,对实际环境的真实水流速度进行监测、提取,通过数据挖掘、建模等手段建立精准的概率分布模型并参与到计算中可作为下一步研究思路。
