机器人辅助下股骨近端防旋髓内钉内固定治疗股骨粗隆间骨折8 例
2019-02-23洪石吴征杰李灿辉
洪石 吴征杰 李灿辉
广州中医药大学附属佛山市中医院(广东佛山528000)
股骨近端防旋髓内钉(proximal femoral nail antirotation,PFNA)是目前治疗粗隆间骨折的主流,传统PFNA 的置入方式依赖于术中反复的透视,增加了患者和医生的射线暴露和手术时间。随着机器人辅助技术的发展,使手术趋于精准、微创化,国内已有机器人辅助骨盆经皮螺钉置入的相关报道,其极大提高了螺钉置入准确率[1-2],但没有关于粗隆间骨折的应用研究。佛山市中医院自引进手术机器人以来,已使用机器人辅助置入PFNA 内固定8 例,现做一回顾性分析评价其有效性和安全性。
1 资料与方法
1.1 一般资料 收集2017年9月至2018年1月佛山市中医院收治的股骨粗隆间骨折18 例,8 例在骨科机器人导航下置入PFNA(机器人组),其中男5 例,女3 例,平均年龄(76.0 ± 8.65)岁,Evans 分型:1a 型2 例,1b 型4 例,1c 型2 例。10 例在传统透视下置入PFNA(透视组),其中男4 例,女6 例,平均年龄(78.4 ± 6.87)岁,Evans 分型:1a 型1 例,1b 型5 例,1c 型4 例。
1.2 手术方法 机器人组:患者麻醉后先行闭合复位,参考股骨近端复位标准[3]:正位片内翻≤5°,外翻≤20°,侧位像成角≤10°。于同侧髂前上棘安置光学示踪器,C 臂机拍摄髋关节正侧位片,导入机器人主控系统进行术前规划(图1),规划完成后机器人机械臂自动运行至定位点,于定位点处做一长约3 cm 切口,将机械臂套筒抵至粗隆顶骨皮质,机器人微调后将导针沿套筒钻入髓腔,透视满意后插入保护套筒,近端扩髓至小粗隆水平,然后置入主钉,术中验证主钉位置(图2)。组装瞄准器,钉入3.5 mm导针至股骨颈。选择合适螺旋刀片长度敲打置入,安装远端瞄准器置入远端螺钉,最后安装尾帽,冲洗术口,逐层缝合。
透视组:以经粗隆顶的股骨干长轴与髂前上棘垂线交点为中心做一长约3~5 cm 切口,分离皮下组织至粗隆顶后,于粗隆顶稍外侧徒手置入导针,透视确定位置满意后其余操作同机器人组。
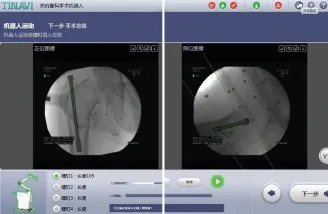
图1 术中主钉路径规划Fig.1 Path planning of the nail

图2 主钉位置验证Fig.2 Position verification of the nail
1.3 评价指标 统计2 组透视次数、主钉导针调整次数、手术时间、评价置钉后复位情况[4]:内外翻及前后成角均小于5°为优,内外翻和(或)前后成角5~10°为良,内外翻和(或)前后成角大于10°为差。采用Harris 髋关节功能评分评价患者功能,并记录相关并发症。
1.4 统计学方法 采用SPSS 25.0 统计学软件进行统计分析,计量资料采用独立样本t检验,计数资料采用Fisher 精确检验,P<0.05 为差异有统计学意义。
2 结果
2 组各有1 例随访丢失,其余患者得到3~6 个月,平均(4.5 ± 1.1)个月的随访,所有患者未出现手术相关并发症。机器人组导针调整次数及术中透视次数少于透视组,差异有统计学意义(P<0.01),2 组总手术时间差异无统计学意义,但置钉时间机器人组少于透视组,差异有统计学意义(P<0.05),2 组术中出血、复位优良率及Harris 功能评分比较差异均无统计学意义。见表1。
表1 患者各项指标比较Tab.1 Comparation of the parameter between two groups ±s
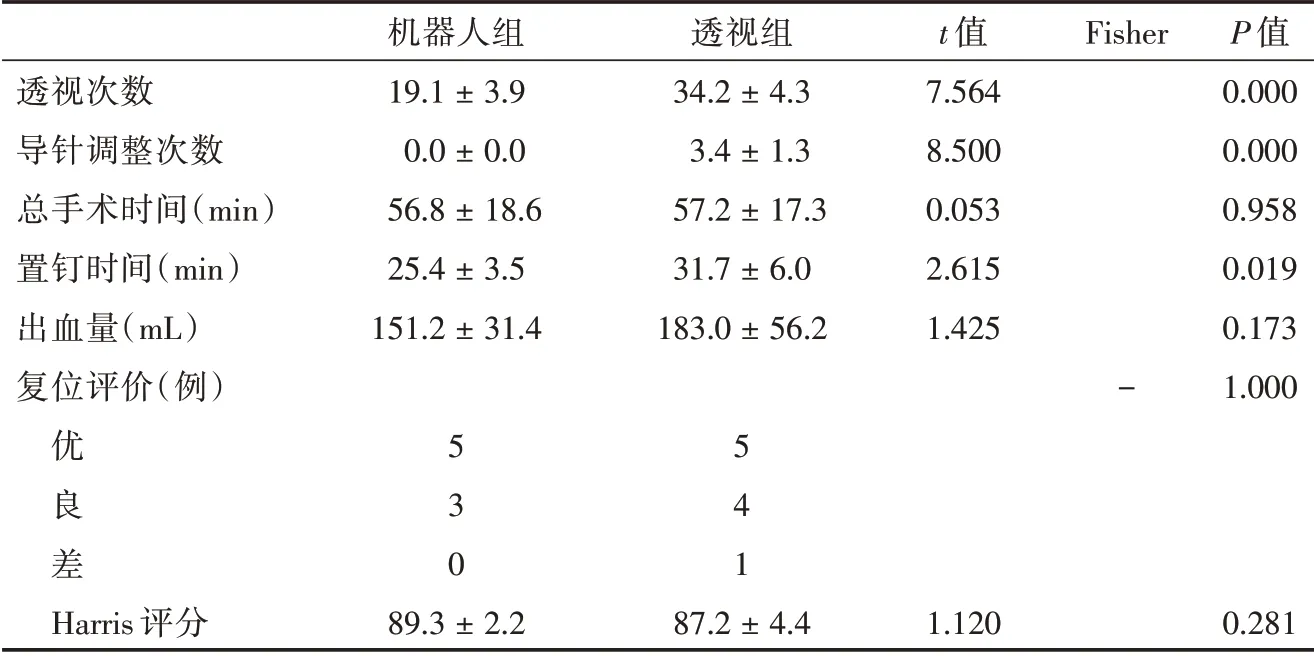
表1 患者各项指标比较Tab.1 Comparation of the parameter between two groups ±s
Fisher透视次数导针调整次数总手术时间(min)置钉时间(min)出血量(mL)复位评价(例)机器人组19.1±3.9 0.0±0.0 56.8±18.6 25.4±3.5 151.2±31.4透视组34.2±4.3 3.4±1.3 57.2±17.3 31.7±6.0 183.0±56.2 t 值7.564 8.500 0.053 2.615 1.425-P 值0.000 0.000 0.958 0.019 0.173 1.000优良差5 3 0 5 4 1 Harris 评分89.3±2.2 87.2±4.4 1.120 0.281
3 讨论
PFNA 为目前治疗股骨粗隆间骨折的主要术式之一,其独特的单螺旋刀片设计,使得在置入时可咬合松质骨,稳定性好且有抗旋作用,尤其适用于老年骨质疏松患者。然而,PFNA 置钉时严重依赖术中透视,这种方式常导致X 线暴露过多及徒手进针时方向难以把握[5]。随着科技的进步,各种智能设备的出现极大推动了骨科手术的精度和安全性[6],骨科手术机器人技术便是具有代表性的一类。第一个应用于临床的机器人系统是美国Integrated Surgical System 公司的RoboDoc,这是一种主动操作型骨科机器人,主要应用于辅助关节置换[7],随后出现多种机器人系统大部分为专用骨科机器人,多用于关节置换和脊柱外科[8],针对创伤骨科的机器人应用研究相对较少[9]。而国内机器人技术尚属起步阶段,具有代表性的天玑骨科机器人系统(TiRobot),其在创伤骨科领域主要用于辅助骨盆经皮螺钉的置入,文献报道准确率达100%[1-2]。目前尚无使用机器人辅助PFNA 置钉的相关研究,但从本研究结果看,机器人组均一次性置入导针,而透视组平均导针调整次数3.4 次,2 组比较差异有统计学意义(P<0.01),透视结果机器人组平均透视19.1 次,明显优于透视组的34.2 次,差异有统计学意义(P<0.01),说明使用机器人辅助下可显著提高导针置入的准确率。笔者认为,其原因在于传统透视主要依赖徒手进针,角度难以把握,需要不断透视以调整导针位置,这无疑增加了射线暴露,而机器人机械臂末端套筒方向是固定的,定好位后术者仅需沿套筒方向钻入导针即可,极大降低了徒手进针时方向把握不准带来的偏差,且普通透视通常为二维图像,这导致术者在参考时有一定困难,机器人系统在使用时可以在规划界面模拟螺钉位置,从而更好地实施手术计划[10]。手术时间方面机器人属新兴设备,熟悉设备使用方法导致总时间2 组差异无统计学意义,但由于机器人置钉精度高,使得有创操作时间(置钉时间)减少。
综上,笔者机器人导航相比传统透视的优势在于:(1)极大提高导针置入准确率,减少导针调整次数;(2)缩短有创操作时间,从而减少术区暴露,降低感染风险;(3)明显减少术中透视次数,降低患者和医生辐射量;(4)操作简便,避免反复操作后手臂疲劳。
注意事项和不足:(1)机器人导航属全新的技术,术者应当反复练习,熟悉设备,减少术前准备时间;(2)机器人精准定位的前提是有良好复位,使用前必须保证复位满意;(3)操作轻柔,避免触碰示踪器影响精度;(4)校准精度达标后再入钉。
目前,国内尚缺乏机器人辅助PFNA 置钉的相关报道,我院由于开展例数较少,尚缺乏足够经验,期待日后更大宗临床实验。通过本研究笔者认为,机器人辅助下PFNA 内固定治疗粗隆间骨折可以在置入主钉时提供精确定位和安全可靠的路径,其操作简单,极大提高主钉置入的准确率,减少透视次数,降低辐射量,减少有创操作时间,治疗效果满意。
