Investigation on Time Domain Motions for Ship and Floating Structure and Coupled with Nonlinear Sloshing
2019-01-09LIYulongZHURenchuanTANGKaiMIAOGuopingYAOPengDENGRui
LI Yu-long,ZHU Ren-chuan,TANG Kai,MIAO Guo-ping,YAO Peng,DENG Rui
(1.School of Marine Science,Sun Yat-Sen University,Guangzhou 510275,China;2.The State Key Laboratory of Ocean Engineering,School of Naval Architecture,Ocean and Civil Engineering,Shanghai Jiao Tong University,Shanghai 200240,China;3.Marine Design and Research Institute of China,Shanghai 200011,China;4.State Key Laboratory of Hydrology Water Resources and Hydraulic Engineering,Nanjing Hydraulic Research Institute,Nanjing 210099,China;5.School of Ocean Engineering and Technology,Sun Yat-sen University,Guangzhou 510275,China)
Abstract:Numerical calculations and comparisons on retard-function for time-domain ship motions were conducted by using both DTM(Direct Time-domain Method)and FTTM(Frequency Transforming to Time-domain Method).DTM is a unified and self-contained theory that it needs heavy CPU times to obtain retard-functions,while it is easy and very quick by using FTTM.For the limitation of frequency range,numerical error may be uncertain and might occurs when FTTM was adopted.The numerical result indicates that FTTM is efficient and practical to handle hydrodynamical problems for ship motions without speed or with low speed.By using FTTM,global ship motion equations involving nonlinear sloshing forces were established in time domain,in which nonlinear sloshing flow behavior was described by using viscous flow theory.The interactions of wave,ship motions and tank sloshing were completely taken into consideration.This method has quite high efficiency since that it takes advantage of potential flow theory for outer flow field and viscous flow theory for inside tank flow field respectively.In this research,time domain sloshing coupled with LNG carrier with a wide range of incident wave frequencies was investigated experimentally and numerically.Both numerical and experimental results were agreeing well with each other.
Key words:time domain simulation;retarded function;sloshing and coupling effect;engineering numerical method
0 Introduction
The sloshing phenomenon often occurs in many kinds of special ships,sometime it can be described as highly nonlinear movement of the free surface of liquids within a tank,which could induce hydrodynamical loads on tank walls.Ships with large ballast tanks and liquid bulk cargo carriers(e.g.oil tankers)often have to face significant sloshing loads during their operations.Therefore,sloshing analysis is very important to the safety for the tank boundary structures,especially for large LNG carriers,large oil tankers,floating structure such as Floating Production Storage and Offloading(FPSO)systems and Floating Storage Regasification Units(FSRU).Thus,sloshing is considered as one of the important factors in the design stage of ships and floating structures.A reasonable time domain numerical method for coupling system containing both ship motions and sloshing is crucial.
Recently,frequency domain method was applied to simulate ship motions in the waves frequently due to its higher efficiency.Three dimensional frequency domain method has been widely used in the seakeeping performance analysis,such as Zhu et al[1]used boundary element method to calculate hydrodynamical coefficients and motions of the multiple floating structure.Compared with the time domain theory,although the frequency domain theory was applied earlier in ship and ocean engineering hydrodynamics region,but it is only suitable for problems with steady state,regarding transient or strongly nonlinear problems,it seems powerless.As for time domain theory,in principle,it can handle the fully nonlinear problem and simulate arbitrary body motions,but the required computing time and computing resources are also far greater than the frequency domain theory,so it still has a certain distance to realistic engineering applications.
Ursell in the 1960s,had put forwarded a simple time domain method,called frequency domain to time domain method.It used the frequency domain Green function method to calculate added mass and damping coefficients firstly,then through the Fourier transform to turn frequency domain hydrodynamic coefficients into the corresponding time domain hydrodynamic coefficients,including the retarded function.The accurate calculation of the retarded function is an important aspect for solving the time domain ship motion equations.Xia and Wang[2]adopted FTTM to calculate the ship motion response under nonlinear wave loads.Chang et al[3]used FTTM to simulate the time domain ship motion history with parametric rolling in head sea.Compared with DTM,FTTM is simple and fast.Compared with the frequency domain Green function method,FTTM can simulate the transient response of the ship and floating structure.However,due to its limitations,numerical calculation can only obtain low frequency damping coefficient,the high frequency one is not easy to obtain.Therefore,for the time domain ship motion coupled with nonlinear sloshing,it needs to choose the suitable ship motion numerical algorithm and research on its application scope.
The coupling effects between sloshing and ship motion have been studied by both numerical calculations and experimental measurements.Francescutto and Contento[4]presented the experimental investigation results of the coupling system between the roll motion and sloshing in a regular beam sea condition.Journe[5]studied the effect of liquid on ship motions based on the calculations and experiments.Molin et al[6]proposed a theoretical model which combined dynamics of a floating structure and sloshing within internal tanks.They presented the comparison of results between calculations and measurements of barge motion and free surface elevation within the tanks.Rognebakke and Faltinsen[7]experimentally and theoretically investigated the coupling effect for a rectangular hull section excited in sway by regular waves.They found that the damping of the sloshing in a certain frequency range plays an important role in determining the calculated accuracy.Gaillarde and Ledoux[8]presented the model tests and numerical results for the FPSO and the LNG carrier with partially filled tanks.Their experimental measurement shows significant coupling effect on the roll motion due to sloshing.
In the present research,the numerical solver of DTM and FTTM were compiled first.The three-dimensional time domain Green function was adopted in the DTM numerical process,and by combined with the ordinary differential equation solving,the present study used the node table method and the nodes interpolation to speed up.It also considered a steady ship speed and the waterline integral.The non-speed three-dimensional frequency domain Green function and the speed amendment were adopted in FTTM.The numerical validations for Wigley ship with and without speed were carried out.The result shows that,at a certain speed range,FTTM results are in good agreement with DTM results.FFTM is more suitable for practical engineering problems without speed or with low speed than DTM,and also has sufficient accuracy.By using FTTM and a viscous flow theory,the present research developed an effective engineering numerical method for time domain ship motions fully coupled with nonlinear sloshing.To validate the numerical solver,LNG time domain motions coupled with sloshing were carried out numerically and experimentally.The comparison between the simulation and the experiment shows that they are in good agreement.
1 Basic equations of time domain theory and verification of the retarded function
1.1 The time domain ship motion equations
As shown in Fig.1,Cartesian coordinate system o-xyz is defined with the origin o on the undisturbed free surface,and oz axis pointing vertically upward.With the speed U0,the equations of time domain ship motion can be written in the following form:

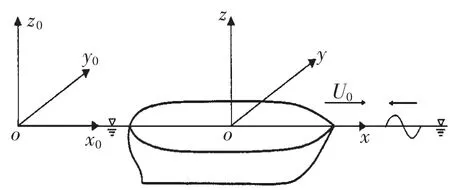
Fig.1 The coordinate system
where xj,represent a displacement,a velocity and an acceleration,respectively.FiW(t)is the wave exciting force acting externally on ship hull.Mijis the total mass matrix,Cijis the hydrostatic restoring force coefficient matrix.The instantaneous items uij,bijand cijare added mass,damping coefficient and the restore force coefficient.Kij()tis the so-called re-tarded function.In time-domain analysis,firstly it must calculate the retarded function,and then take it into motion equations to solve the time domain ship motion,so the retarded function is particularly important in the entire solving process.
1.2 Frequency to time domain method(FTTM)
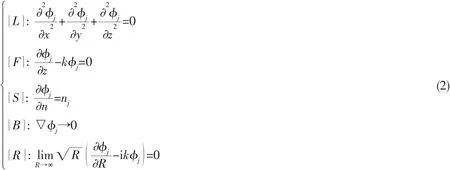
The linear frequency domain boundary value problem for the j mode three dimensional spatial unit potential is written as follows:
The three-dimensional frequency domain Green Function was used to ensure accuracy of numerical calculation:

The radiation potential Φj(j=1,2,…,6 )is satisfied with the boundary integral equation as follows:

The radiation force and moment can be gotten as:

Using Ajk(ω )and Bjk(ω )to express added mass and damping coefficient with a certain frequency ω,the radiation force can be written as:

When the wave movement is a simple harmonic motion,the plural form of the time domain radiation force or moment can be expressed as:

So the added mass and the damping coefficient can be written as:

Thus,when the time domain solution was obtained,using the Fourier transform,added mass and damping coefficient with various frequencies were obtained.On the other hand,the retarded function can be obtained by using the inverse Fourier transform:

The relation between a frequency domain solution and a time domain solution is Kramers Kronig relation.
1.3 Direct time-domain method(DTM)
As an example,the k mode(k=1,2,…,6)three dimensional time domain velocity potential problem usually can be written as follows:
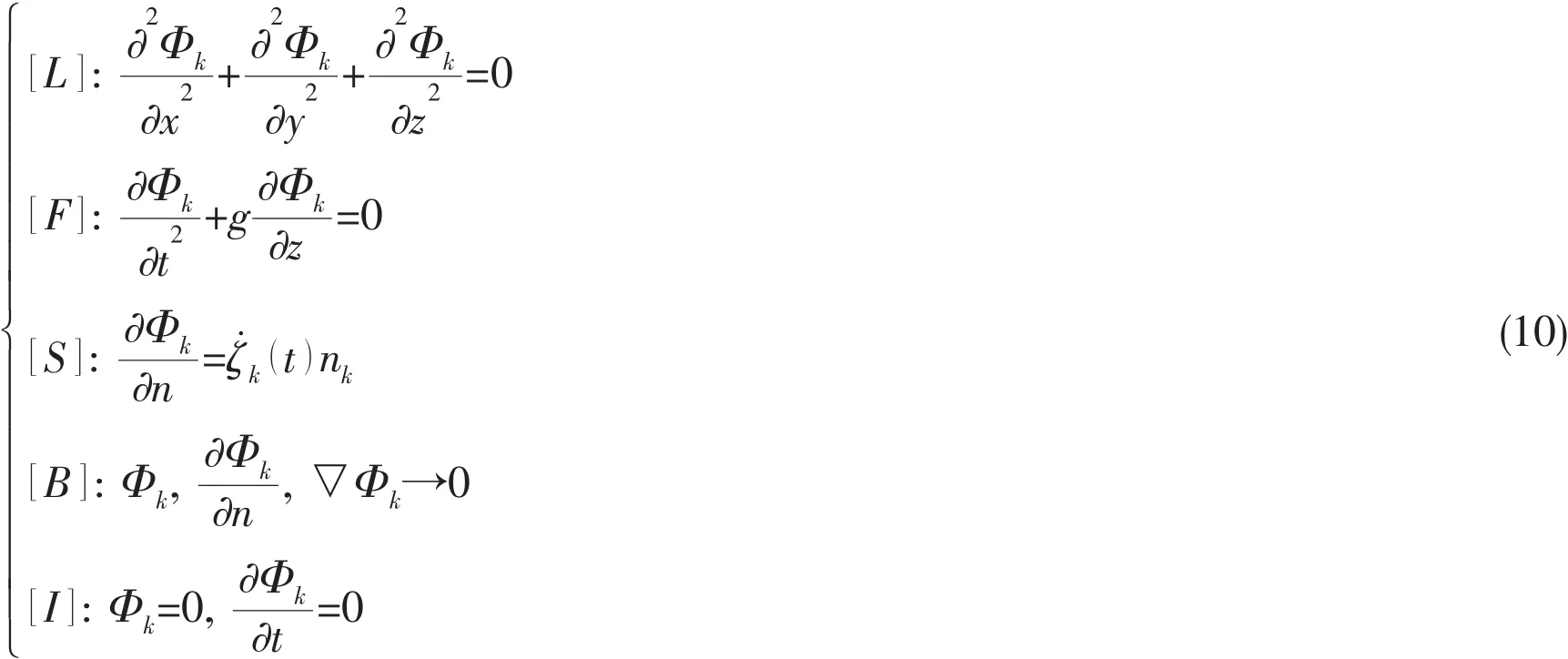

where(x,y,z )and(ξ,η,ζ)are the coordinates of the field point p and the source point q respectively.R2=(x- ξ)2+(y-η )2,r2=R2-(z- ζ)2,and=R2+(z-ζ)2.By applying the time domain Green function,a memory part of the radiation potential can be expressed as:

The radiation force and moment can be gotten as:

where:

1.4 The retarded function with and without speed
This section focuses on the discussion about retarded function acquired by both DTM and FTTM.First it needs to acquire the damping coefficients.Using the Wigley ship type as an example,numerical validation of the retarded function had been carried out.The length of Wigley ship L=3 m,length breadth ratio L/B=10,breadth draft ratio L/B=1.6,displacement Δ=0.094 6 m3,the half breadth mathematical expression of Wigley ship is as follows:

Fig.2 Boundary element method surface mesh of Wigley ship
where b is half breadth of Wigley ship b=B/2,X=(2x/L)2,Z=(z/ T )2.Fig.2 is boundary element mesh of the Wigley ship.
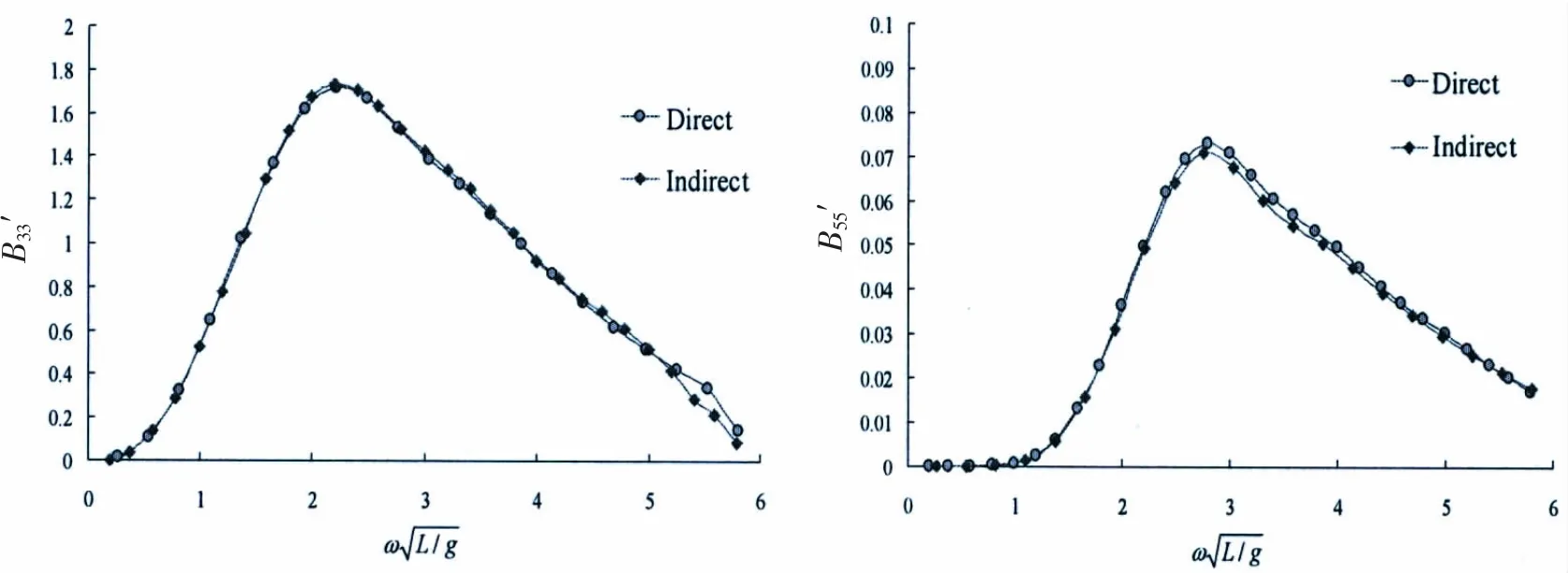
Fig.3 Non-dimensional heave and pitch damping coefficients for Wigley hull at β=180°
The first and second pictures of Fig.3 are heave and pitch damping coefficient curves of Wigley ship without speed.Dashed lines with different names are numerical results by frequency domain theory and time domain theory.Direct one is based on time domain,and indirect one is based on frequency domain.In Fig.3,the horizontal axis indicates the dimensionless frequen-the vertical axis indicates the dimensionless heave-pitch damping coefficient B33′=or dimensionless pitching-heave dampingFrom Fig.3,it can be seen damping coefficients obtained by DTM and FTTM are in good agreement.
Fig.4 shows heave and pitch(K33and K55)retarded functions of Wigley ship without speed.The horizontal axis is time,the unit is s;the vertical axis indicates the retarded function corresponding its mode.From Fig.4,it can be seen numerical results obtained by DTM and FTTM are in good agreement.Combined with the damping coefficient,the numerical result fully shows without speed condition,the mutual conversion of the frequency domain result and time domain result is effective.In addition,in the calculation process,it is found that for the same example,using the same computer,the time consumption of DTM is five to eight times to FTTM.This also shows that with complement of the highly frequency damping coefficient,the numerical accuracy of the retarded function obtained by FTTM has no loss.As large advantage in time consumption,apparently,the FTTM is more suitable for engineering applications.
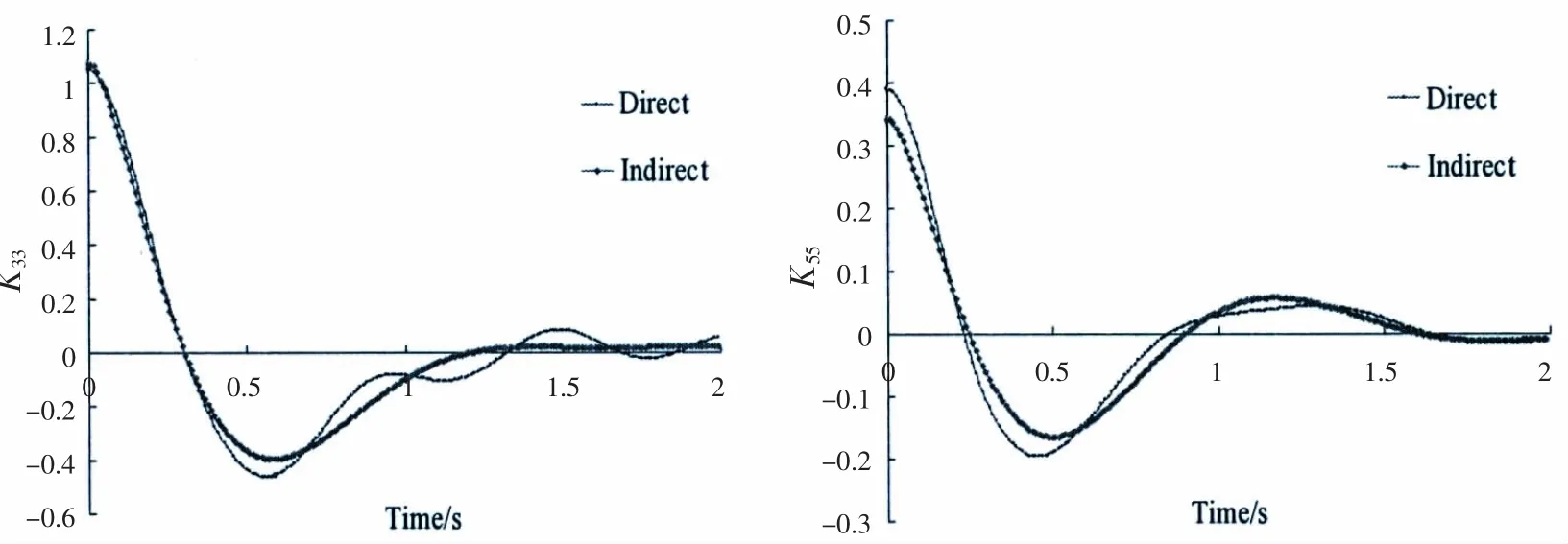
Fig.4 Non-dimensional heave and pitch memory functions for Wigley hull at β=180°
Fig.5 Heave and pitch damping memory functions for Wigley hull at Fn=0.1,β=180°
Fig.5 and Fig.6 are heave and pitch retarded functions of Wigley ship with Fn=0.1 and Fn=0.2 respectively.The physical expression of the horizontal axis and vertical axis are the same as in Fig.4.It can be seen that with certain speed,results of heave mode retarded function are in good agreement,but after t=0.5 s,results of pitch mode retarded function have some deviation.With the speed increasing,the difference between the DTM and the FTTM is also increasing.But frequency domain damping coefficients with a speed were obtained by the speed correcting method.In essence,it is using without-speed frequency domain Green function instead of the with-speed frequency domain Green function to solve the velocity potential.Cur-rently,the numerical calculation of the with-speed Green function has lots of difficulties for realistic engineering problem.But from results,it can be seen the FTTM has the certain accuracy on the low speed range.Generally,ships with the sloshing are always in a non-speed or a very low-speed situation.In low speed range,FTTM not only can guarantee the calculation accuracy,but also has a greater advantage on CPU time than DTM.So the present study adopted FTTM to carry out the numerical investigation on the time domain ship motion and fully coupled with sloshing problem.
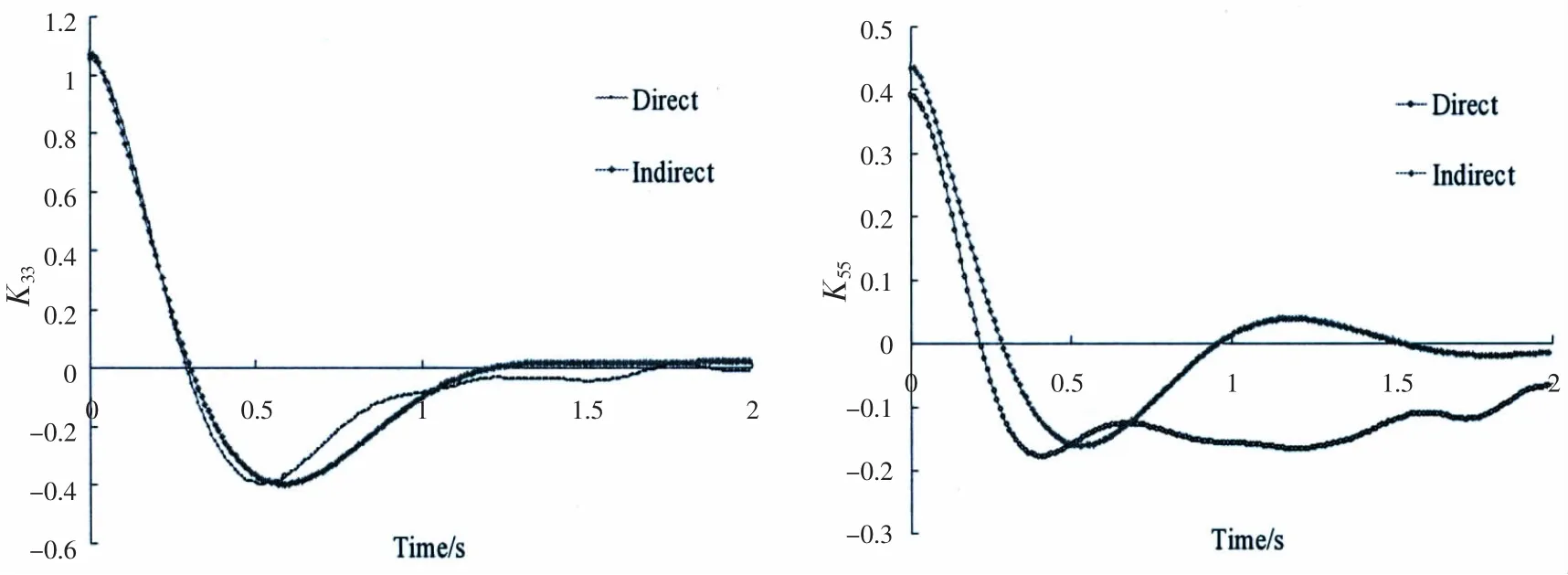
Fig.6 Heave and pitch damping memory functions for Wigley hull at Fn=0.2,β=180°
2 Tank sloshing problem
2.1 Sloshing problem based on viscous flow theory
Multiple phases flow theories were adopted to describe the flow field within the tank.The continuity equation and incompressible Navier-Stokes equations are regarded as the governing equations written as:
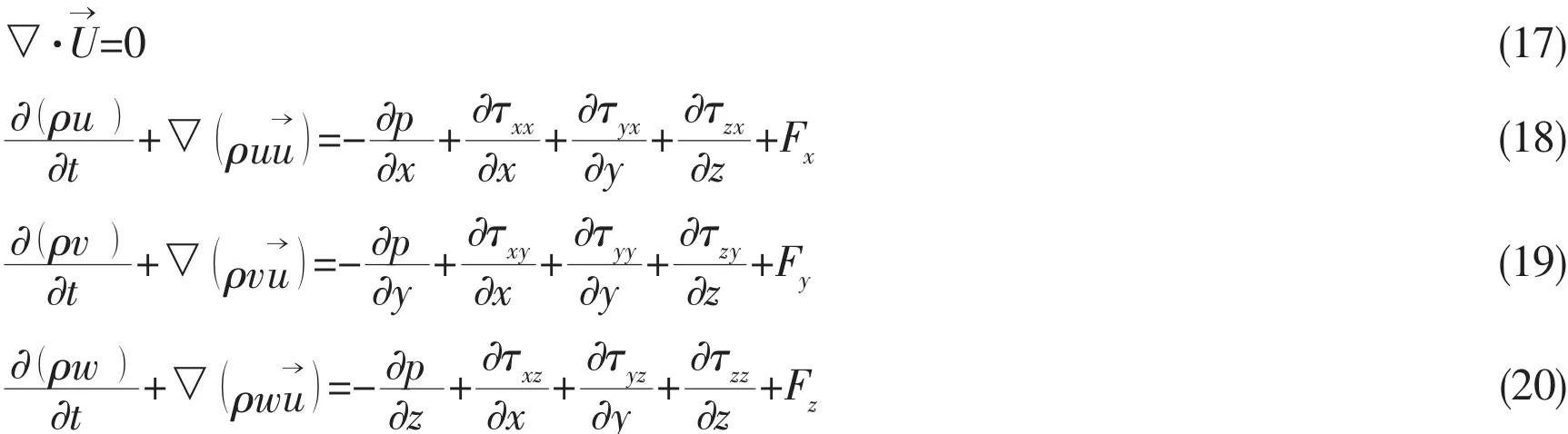

The boundary condition on the tank walls is:

2.2 Treatments for simulation of tank sloshing
During the simulation of sloshing,so-called rigid mesh,one of dynamic mesh technology was adopted in which the nodes and meshes move together with the tank wall following the rules of ship global motions.The mesh geometry and the nodal positions relative to the tank wall will not change during the simulation.On some point it will improve the computational efficiency and keep the numerical stability without the mesh generations and deformations by taking into account this dynamic mesh technique.In order to reconstruct the free surface and to describe the nonlinear phenomena accurately,fine meshes of higher density were used around the wall and near the free surface region.
To solve the N-S equations,the second order implicit difference scheme was used to handle transient terms and the up-wind difference scheme to handle the convective terms of the momentum equations.RNG-k-ε turbulence model was adopted to simulate Reynolds stress,and PISO(Pressure Implicit with Splitting of Operators)scheme was adopted to solve the pressure and velocity iteratively.When the VOF method was employed to capture the free surface deformation,Gauss Van Leer scheme was adopted to handle the VOF equation,and the geometrical reconstruction and donor-acceptor schemes were applied.
3 Numerical method of tank sloshing coupling with ship motion
In time domain,the hydrodynamical pressure of the sloshing has already obtained at current time step,and the ship motion equations can be established at the same time step.The equations of time domain global ship motions coupled with tank sloshing can be given as:

where b1and b2are viscous coefficients from experiment or CFD simulation.When tank sloshing problem was already solved at current time step,the sloshing induced forces and moments can be obtained by integrates the hydrodynamical pressure along every tank boundaries,and then add it with the external wave forces and moments induced by incident wave or mooring line,finally the total exciting forces and moments acting on the ship can be obtained,which are right hand side of the Eq.(23).After solving Eq.(23)at current time step,the global motion was obtained and then transferred into the simulation procedure of tank sloshing,as the boundary conditions for the next time step.Thus,the time domain numerical solver for whole coupling system is established,which is implemented by Fortran 95 and C language.
It should be noted that during the calculations of ship global motions and sloshing,the moment center is the same as the gravity center of the ship.In the case of surge,sway and yaw motions,the concept of soft spring was adopted to prevent the monotonously increasing or decreasing motion.The soft spring can be considered as a mooring system or an autopilot.
4 Experimental research and numerical computation
4.1 LNG carrier and liquid tanks
The LNG carrier model test with and without sloshing effect was carried out at the wave basin of Marine Design and Research Institute of China,Shanghai.LNG model oscillated in waves without forward speed and encountered with regular waves.The principal dimensions of LNG and model are listed in Tab.1.The scale ratio of ship to model is 68:1.Fig.7 is the ship model and tank model picture of the LNG carrier.

Fig.7 LNG ship model for experiment
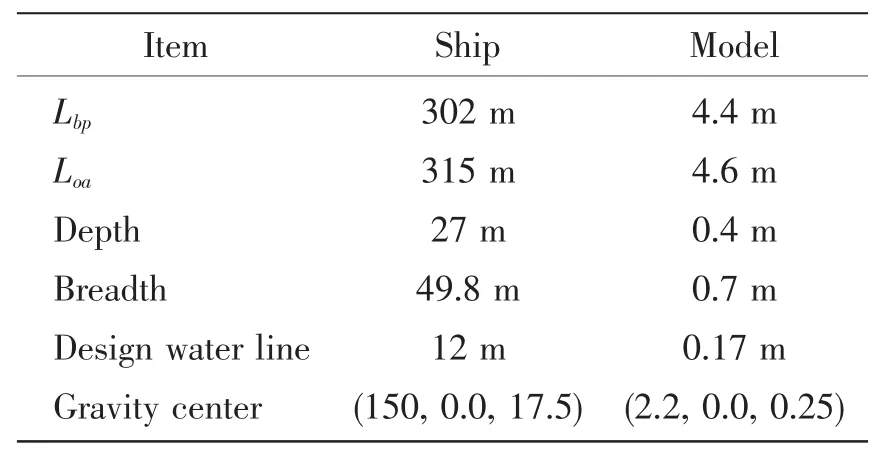
Tab.1 Main parameters of LNG ship
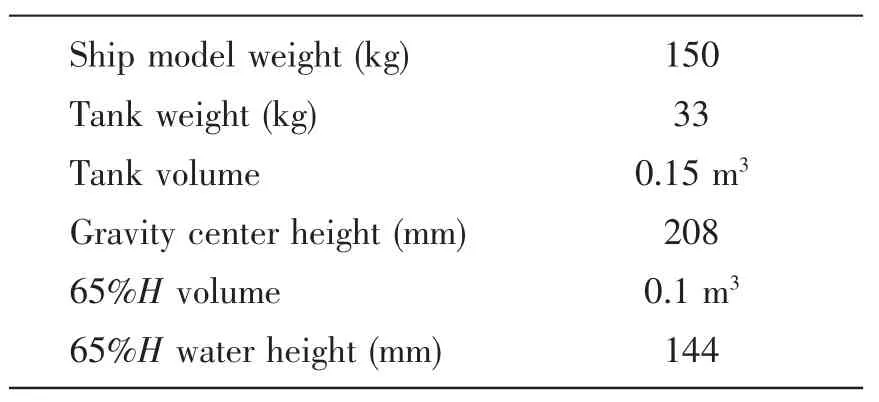
Tab.2 Main parameters of tank
Configuration and parameters are listed in Tab.2,and the depth and breadth are 432.4 mm and 638.5 mm,respectively.The length of model tank is 585.9 mm,and tanks were placed at the both sides of mid-ship,one located on 152.2 mm from mid-ship at aft,and the other one located on 552.8 mm at fore.
4.2 LNG carrier RAO results without sloshing by FTTM
This section focuses on the numerical validation for LNG carrier.Fig.8 shows the boundary element mesh of the LNG carrier ship.RAO results for LNG carrier are shown in Fig.9 to Fig.11.Among these figures,the red points represent the experimental values,and the dash line represents the FTTM result.
Fig.8 Time domain BEM numerical mesh of LNG ship
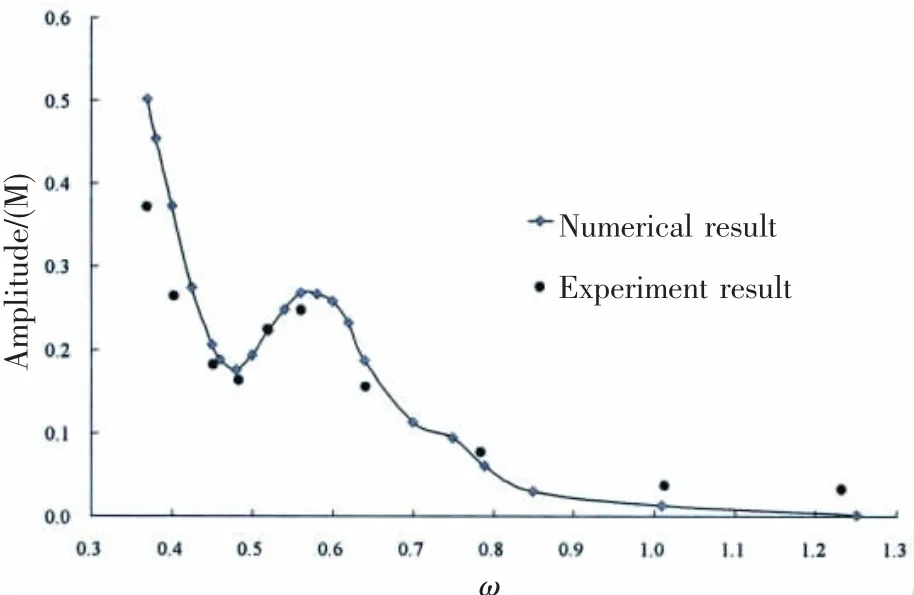
Fig.9 Heave RAO comparison between numerical and experiment results
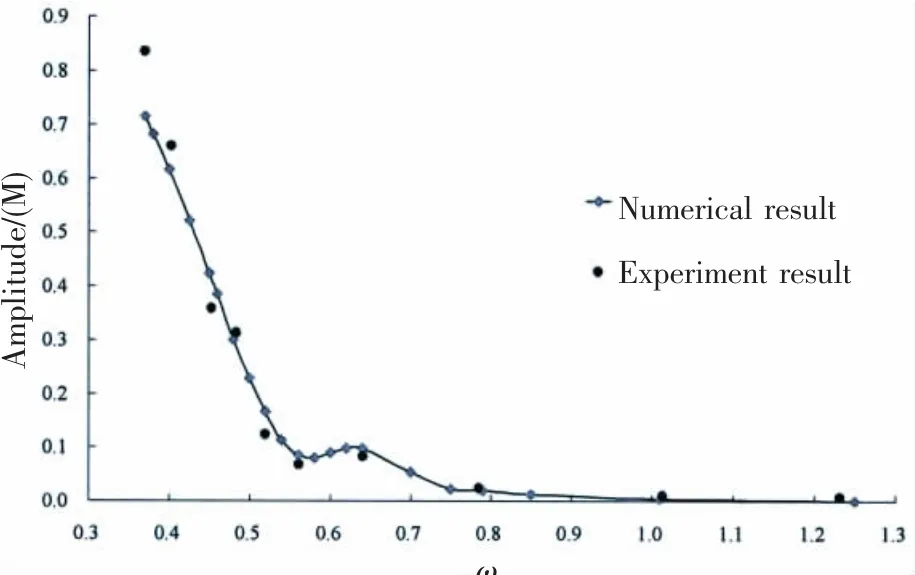
Fig.10 Pitch RAO comparison between numerical and experiment results
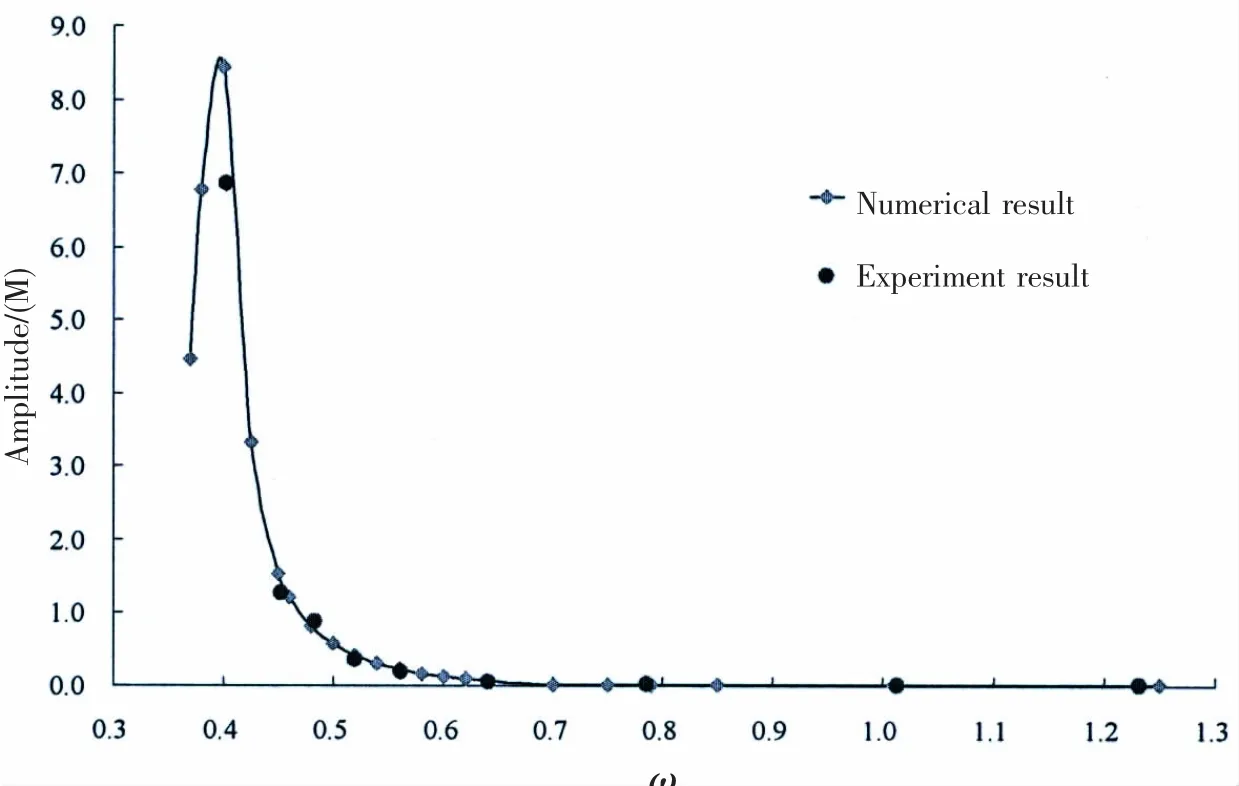
Fig.11 Roll RAO comparison between numerical and experiment results
It can be seen from Fig.9 to Fig.11,the FTTM results and the experimental results are in good agreement.Generally,in low speed range,FTTM can guarantee the calculation accuracy as talked before,and also has a greater advantage at CPU time than DTM.That is the reason that FTTM was chosen to carry out numerical researches for our coupling system.
4.3 Coupling motion numerical results of LNG carrier
According to the model test,two tanks are filled with water that the water height is 65%relative to the tank depth.The frequency resonance range of LNG carrier is about 0.35 to 0.45 rad/s.
Numerical mesh of the couple system for numerical calculation is shown in Fig.12.In time domain,the numerical calculation was carried out with conditions of the head sea and the beam sea respectively.
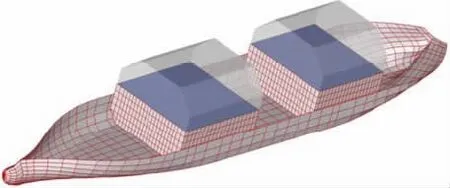
Fig.12 Numerical mesh of the couple system for numerical calculation
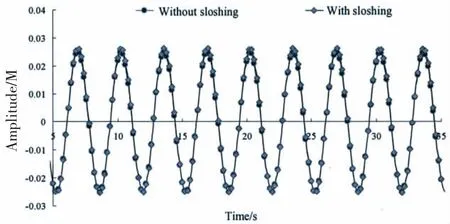
Fig.13 Time history curve of heave(Head sea,T=3.3 s,ζa=2.85 cm)
In the calculation process,the total time of numerical simulation was set to 50 times of incident wave period and the time step of numerical simulation is set to 0.002 s.Fig.13 to Fig.16 are time histories of pitch,heave and roll of LNG represented by the real lines and the doted lines,and without sloshing results were also listed.Fig.13 to Fig.14 show the coupling motions of LNG,in which ship is under head sea condition and wave period(T )and amplitude(ζa)are 3.34 s and 2.90 cm,respectively.From these figures,it can be observed that sloshing just slightly affected the global motion under low frequency condition.Similarly slosh-ing also just slightly affected the global motion under the high frequency condition that the results are shown in Fig.15 to Fig.16(case 2,Head sea,T=0.802 s,ζa=2.96 cm).
As for the beam sea condition,the global motions of LNG model with/without tank sloshing show the difference comparing with the head sea condition.Fig.17 to Fig.18 show the heave and roll motions excited by the wave frequency near the nature frequency of ship roll motion.For the heave and roll,tiny difference and quite big difference can be seen from results.Near the nature frequency,sloshing made big contributions to roll moment,so the roll motion was dramatically reduced.
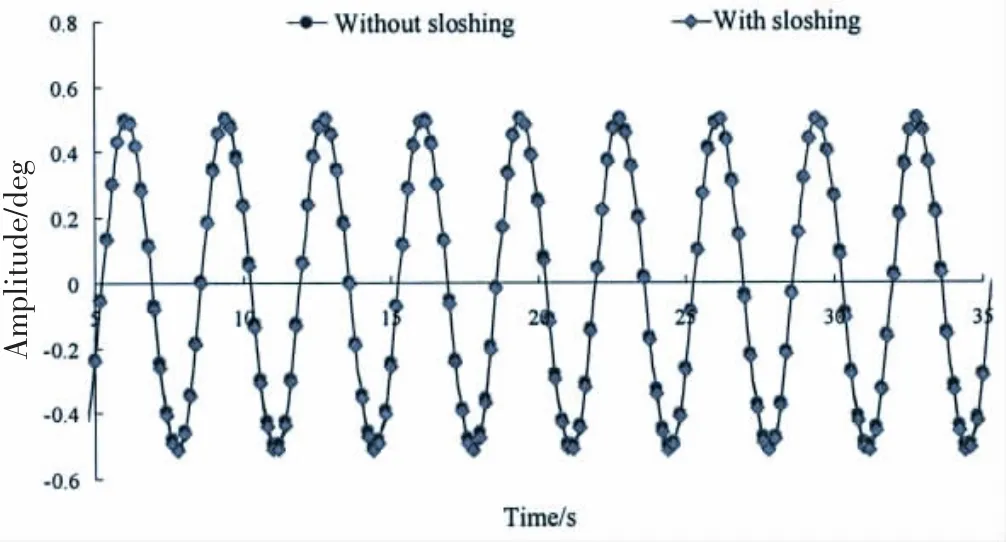
Fig.14 Time history curve of pitch(Head sea,T=3.3 s,ζa=2.85 cm)
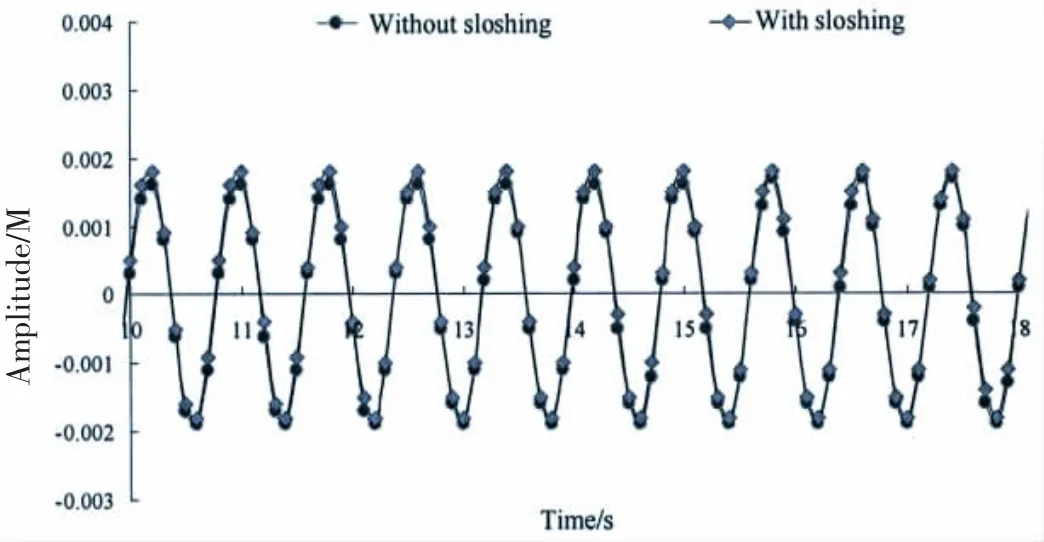
Fig.15 Time history curve of heave(Head sea,T=0.8 s,ζa=2.9 cm)
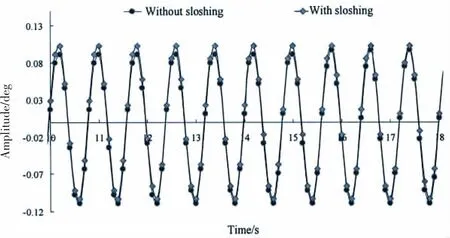
Fig.16 Time history curve of heave(Head sea,T=0.8 s,ζa=2.9 cm)
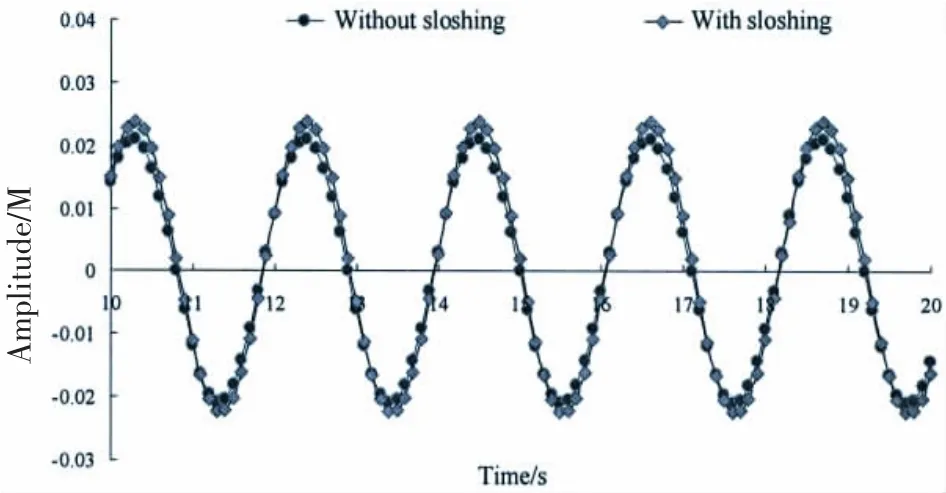
Fig.17 Time history curve of heave(Beam sea,T=2.1 s,ζa=2.1 cm)
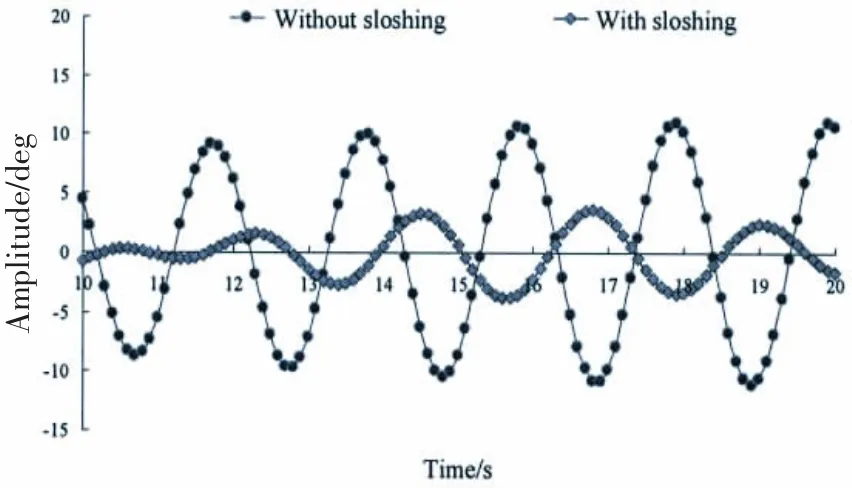
Fig.18 Time history curve of heave(Beam sea,T=2.1 s,ζa=2.1 cm)
Fig.19 to Fig.21 are the different modes RAO curves of LNG carrier coupled with sloshing.The blue symbols in the two figures are numerical results while the real lines are the experimental results.From these figures,for both heave and roll,the numerical and experimental results are all in nice agreement under all exciting wave frequencies.The in house numerical solver developed by this research is accurate and effective.
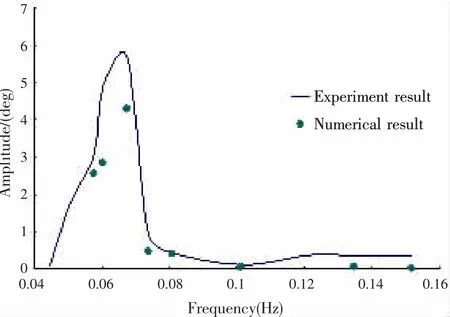
Fig.19 Roll RAO comparison between numerical and experiment results
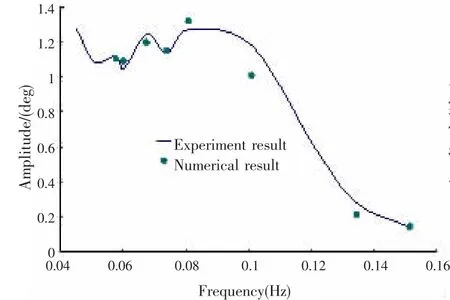
Fig.20 Heave RAO comparison between numerical and experiment results
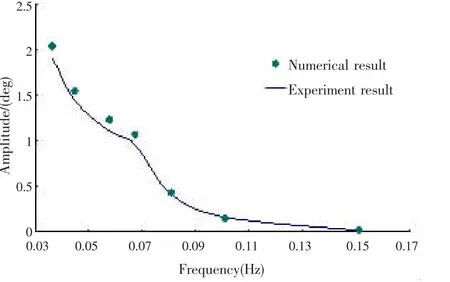
Fig.21 Pitch RAO comparison between numerical and experiment results
5 Conclusions
Based on the present research,the following conclusions can be obtained:
The retarded function obtained by both DTM and FTTM is effective.The FTTM also has a greater advantage at CPU time consumption,and is more efficient and practical to handle a realistic engineering problem.The Kramers-Kronig relation which relating frequency domain and time domain has been proved numerically,through a large number of calculations of the retarded function and the damping coefficient.
Through the comparison of the retarded functions with forward different speed obtained by DTM and FTTM,it indicates that using the non-speed frequency domain Green function and speed correcting method,along with the speed increasing,the difference of numerical results between the DTM and the FTTM is also increasing.Facing real engineering problems without speed or with low speed,the FTTM is very practical.Using FTTM to handle the ship with sloshing effect such as LNG carrier or FPSO is reasonable and effective.
The sloshing flow plays an important role within the coupling effects,especially to roll motion.The bigger moment phase difference between the wave excited and sloshing induced moments makes the dramatic reduction of the roll motion,when the encounter frequency is within the resonance range.In resonance frequency range of the roll motion,the traditional numerical method based on potential flow theory has some limitations,but it is also able to give quite satisfactory results.The sloshing flow has small effect on the heave and pitch motions,no matter whether the encounter frequency is low or high.
This in house engineering numerical solver developed by this research combined CFD and FTTM is very effective for the ship or the floating structure coupled with nonlinear sloshing.CFD method is very suitable for the realistic engineering region and is able to finely simulate the stronger non-linear physical phenomena of sloshing.And if it has an enough computing resource,using the finite volume method finely and skillfully for numerical simulation of sloshing,will play a very important role on the design and analysis for tank wall strength,with FEM analysis as an example.
杂志排行

船舶力学的其它文章
- Dynamic Stability of Liquefied Cargo Ship in Waves
- Overset Simulations of Submarine’s Emergency Surfacing Maneuvering in Calm Water and Regular Waves
- A Revised Method for Predicting Added Waves Resistance Based on Comparison of Theoretical and Empirical Results for VLCC Hull Forms
- 3D Nonlinear Hydroelastic Response and Load Prediction of A Large Bulk Carrier in Time Domain
- Strength Characteristics of Maraging Steel Spherical Pressure Hulls for Deep Manned Submersibles
- Research on Stress Intensity Factors for the Deflected Crack of CTS Specimen