基于离散时间信号相关性的交通事件检测算法
2018-12-04郭忠印
孙 倩, 郭忠印
(同济大学 道路与交通工程教育部重点实验室, 上海 201804)
交通事件包括的内容很多,如交通事故、故障停车、道路施工和天气情况等,它将直接导致某段道路通行能力减弱,从而引起交通拥堵等现象.据统计,在美国交通事件引起的拥堵占城市快速路总拥堵事件的50%~75%[1].FHWA(Federal Highway Administration)的报告指出,由交通事故、故障停车等交通事件引起的公路延误占交通拥堵总延误的1/3[2].
目前已有很多自动交通事件检测(AID)算法.随着智能交通系统的发展,城市内间断交通流环境道路渐渐能够实现摄像头全覆盖,因此本文主要关注高速公路和城市快速路等连续交通流环境道路的AID算法.
早期开发的AID算法主要有标准偏差算法[3]、加利福尼亚(Ca)算法[4]和基于突变理论的McMaster算法[5]等.随着交通流理论和机器学习的发展,越来越多的算法涌现出来,这些算法主要分为2个方向:一个方向是基于机器学习,通过输入不同参数训练分类模型以评价是否发生交通事件,如神经网络模型[6-7]、二分类支持向量机模型[8-9]、多分类支持向量机模型[10]、决策树模型[11]、贝叶斯模型[12]和核极限学习机模型[13]等;另一个方向是预测法,即通过已有数据对未来状态进行预测并与实测数据进行比较,以判断是否发生交通事件,如基于突变理论的交通事故离群挖掘算法[14]、事件影响指数检测算法[15]和交通状态变异指数法[16]等.此外,不同的AID算法对不同条件的适应性不同,因此一些算法的组合和集成类模型被提出,如以因子分析与聚类分析为手段的基于多个AID算法的决策级融合方法[17]、基于时间序列方法和机器学习方法的组合AID算法[18]和多个朴素贝叶斯分类器的AID算法[19]等.现有算法普遍存在计算复杂、泛化能力不强、容易出现过拟合等问题,其表现方式没有传统算法直观,并且需要具体路段大量事件与非事件历史数据的支持,影响了模型的推广及应用.
信号处理技术中互相关常常应用于时延估计[20]和定位[21],其原理为利用声波在空气中直线传播和遇到障碍物反射抵达接收端的时间差进行时延估计和障碍物定位.通过计算2次声音抵达接收端获得的信号互相关系数能够分析2组信号不同相位条件下的相似程度,相关性最高点对应的相位即为2次声音抵达接收端的时差.交通流有与声波类似的性质.本文以此为基础,论证了将上、下游采集到的交通信息等价为2组离散时间信号的合理性.通过计算互相关系数分析交通流变化,并据此提出基于离散数字信号相关性的AID算法.通过仿真模拟不同交通流条件下的事件场景,与加利福尼亚算法进行对比评价.
1 离散时间信号相关性算法
1.1 离散时间信号相关性理论
离散信号是离散自变量的函数,当自变量为时间n时,叫做离散时间信号,它表现为在时间上按一定次序排列的不连续的一组数的集合,故也称为时域离散信号,用x(n)表示.
相关是研究2个信号之间,或一个信号和其位移后的相关性,前者叫做信号互相关,后者叫做信号自相关,本文主要讨论的是信号互相关.离散时间信号x(n)和y(n)的互相关函数
Rxy(τ)=∑x(n)y(n+τ)
(1)
根据广义瑞利公式和互能谱定义推导可知,互相关函数Rxy(τ)和互能谱Wxy(k)是一对傅里叶变换.因此,在计算Rxy(τ)时,通过对离散时间信号x(n)和y(n)进行离散傅里叶变换得到频谱密度X(k)和Y(k),计算公式如下所示:
式中:N为信号长度.
对互能谱进行傅里叶变换得到互相关函数Rxy(τ),如下所示:
Wxy(k)=X(k)Y*(k)
Rxy(τ)=f(Wxy(k))
式中:*表示共轭转置运算;f表示傅里叶变换运算.最终得到互相关系数
互相关系数ρxy(τ)为一个0~1的序列,它表示2个离散时间信号相位差为τ时的相关性,越接近1表示越相关.
1.2 离散时间信号相关性应用
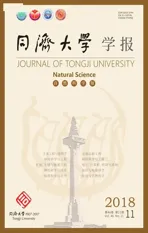
将上、下游采集到的交通信息数据转化为离散时间信号,交通信息数据为通过采集区的车辆速度.转化为离散时间信号的方法是:选取固定周期,当周期内有一个数据,该数据的值即为离散时间信号该时间位置上的幅值;当周期内有2个或以上数据,该数据的平均值即为离散时间信号该时间位置上的幅值;当周期内没有数据,幅值为零.现选取G109某两相邻截面的调研数据,该数据采集时间内未发生交通事件,两截面距离约800 m.由于交通量较少,周期取70 s.离散时间信号分布如图1所示.横坐标时间序列代表第n个周期,纵坐标代表第n个周期内的速度平均值,可见两截面的离散时间信号分布图存在一定的相似性,但截面2的幅值普遍比截面1低.
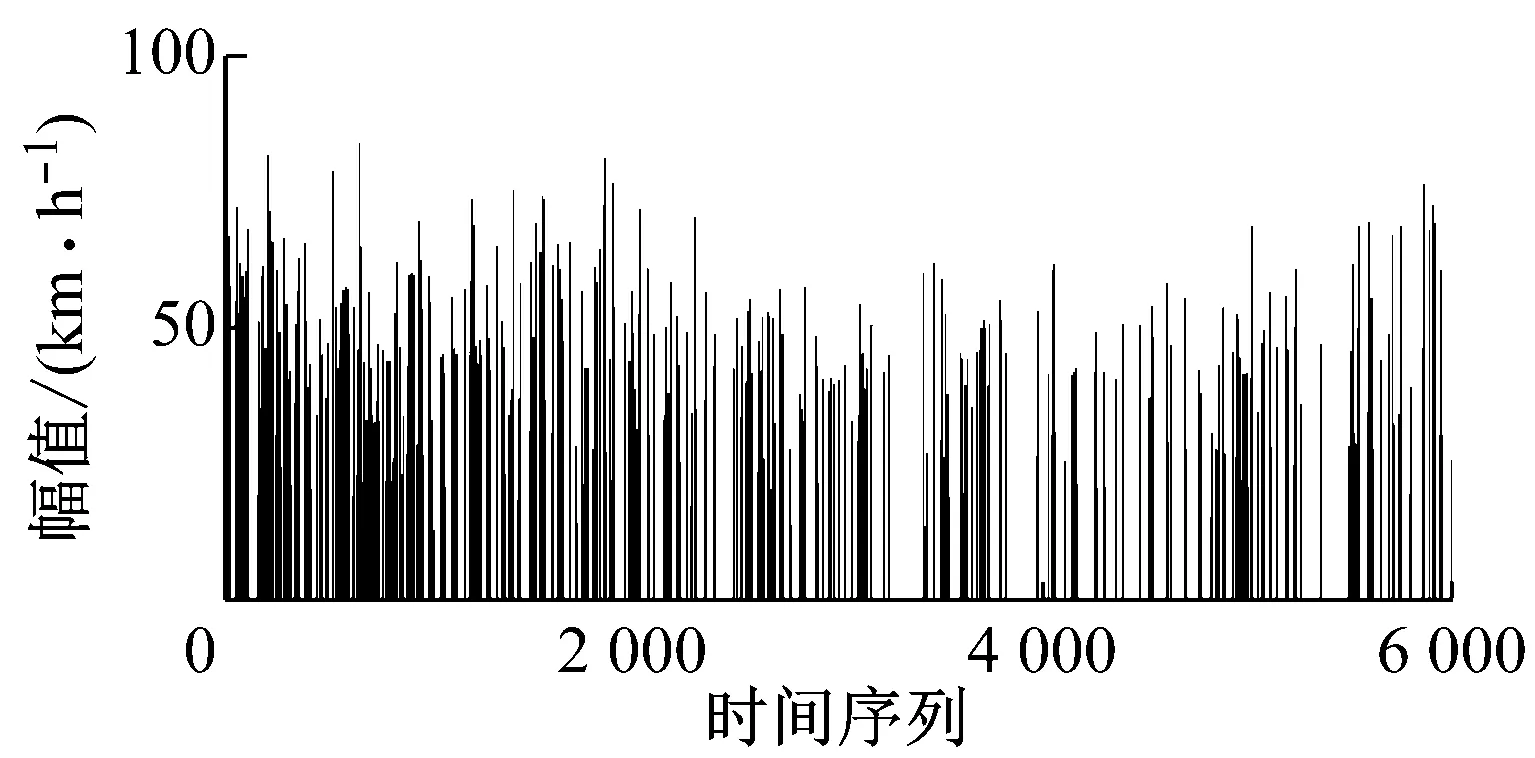
a 截面1
b 截面2图1 离散时间信号分布Fig.1 Distribution of discrete time signal
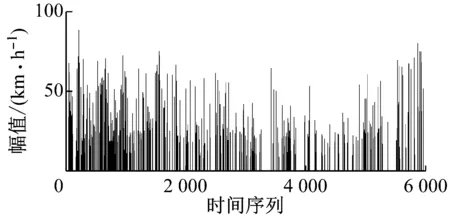
根据第1.1节的离散时间信号相关性理论,分别计算1组离散时间信号的自相关系数和2组离散时间信号的互相关系数,如图2所示.横坐标为2段离散事件信号的相位差,纵坐标为该相位差下信号的相关系数.从图2可以看到非常明显的峰值.图2a中,离散时间序列相位差τ=0时自相关系数为1,代表信号完全相同;图2b中,离散时间信号相位差τ=1时2组信号存在最大相似性,其所对应的数据为同一组交通流,根据截面距离和交通流速可知结果可信.
a 截面1自相关系数
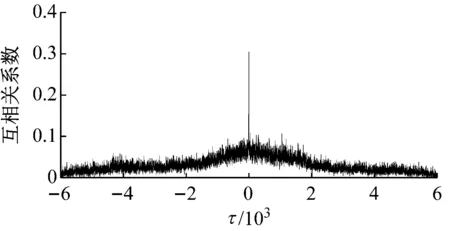
b 两截面互相关系数图2 相关系数分布Fig.2 Distribution of correlation coefficient
由此可见,将交通信息数据转化为离散时间信号并进行相关性计算,可以有效定位同一组交通流并计算其相似性.
2 交通离散时间信号相关性特征分析
2.1 互相关系数特征分析
取图2b中的峰值为互相关系数F,根据信号处理理论,互相关系数F越接近1表示上、下游交通流越相似,即交通流在该路段越稳定,但是该系数本身没有实际物理意义.随着时间的发展,交通流相似性会越来越低,互相关系数F也会越来越小,最终成为背景噪声,因此本节研究互相关系数F的主要影响因素.
将不同的上、下游截面距离L和离散时间信号重叠长度N0绘制成多条信号长度和互相关系数的关系线,如图3所示.可以发现,当L和N0一定时,互相关系数F与离散时间信号长度N的倒数成线性相关,且通过横轴同一点,可用下式表示:
F=k(1/N-a)
式中:k为斜率,其大小与L和N0有关;a为待定参数.
当互相关系数F过小时会成为背景噪声,因此互相关系数F的大值端更受关注,即斜率k与L和N0的关系更受关注.取不同的截面距离和重叠信号长度绘制斜率的等值线图(见图4),发现截面距离和重叠信号长度可以互补,以使斜率达到足够大,但并不是没有极限.重叠信号长度不可能大于信号总长度,即当上、下游截面距离固定,重叠信号长度等于信号总长度时,互相关系数F达到最大.根据这个性质,以保证检测效果为目的,可以确定上、下游截面容许距离.
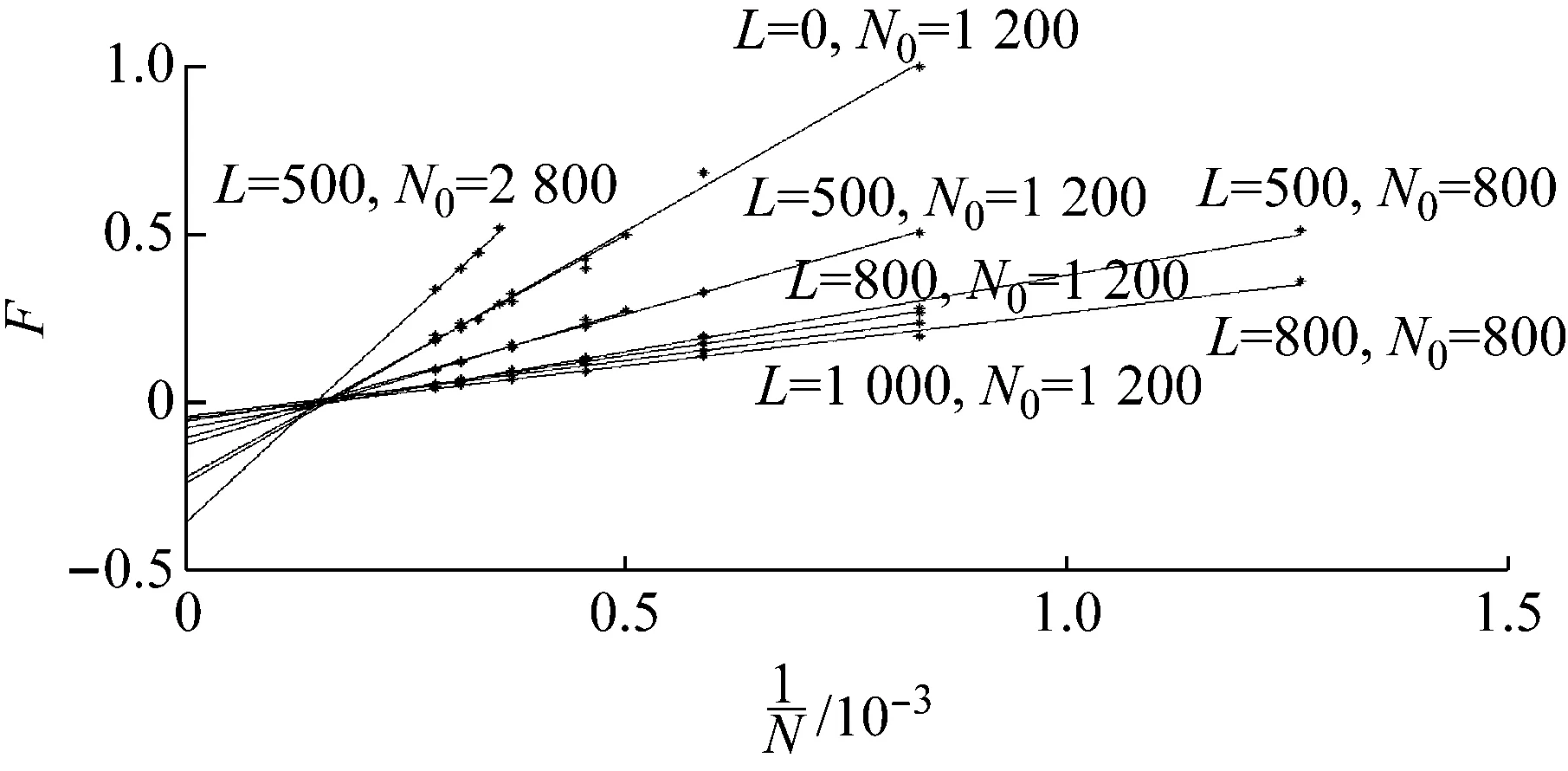
图3 信号长度与互相关系数关系Fig.3 Relationship between signal length and correlation coefficient
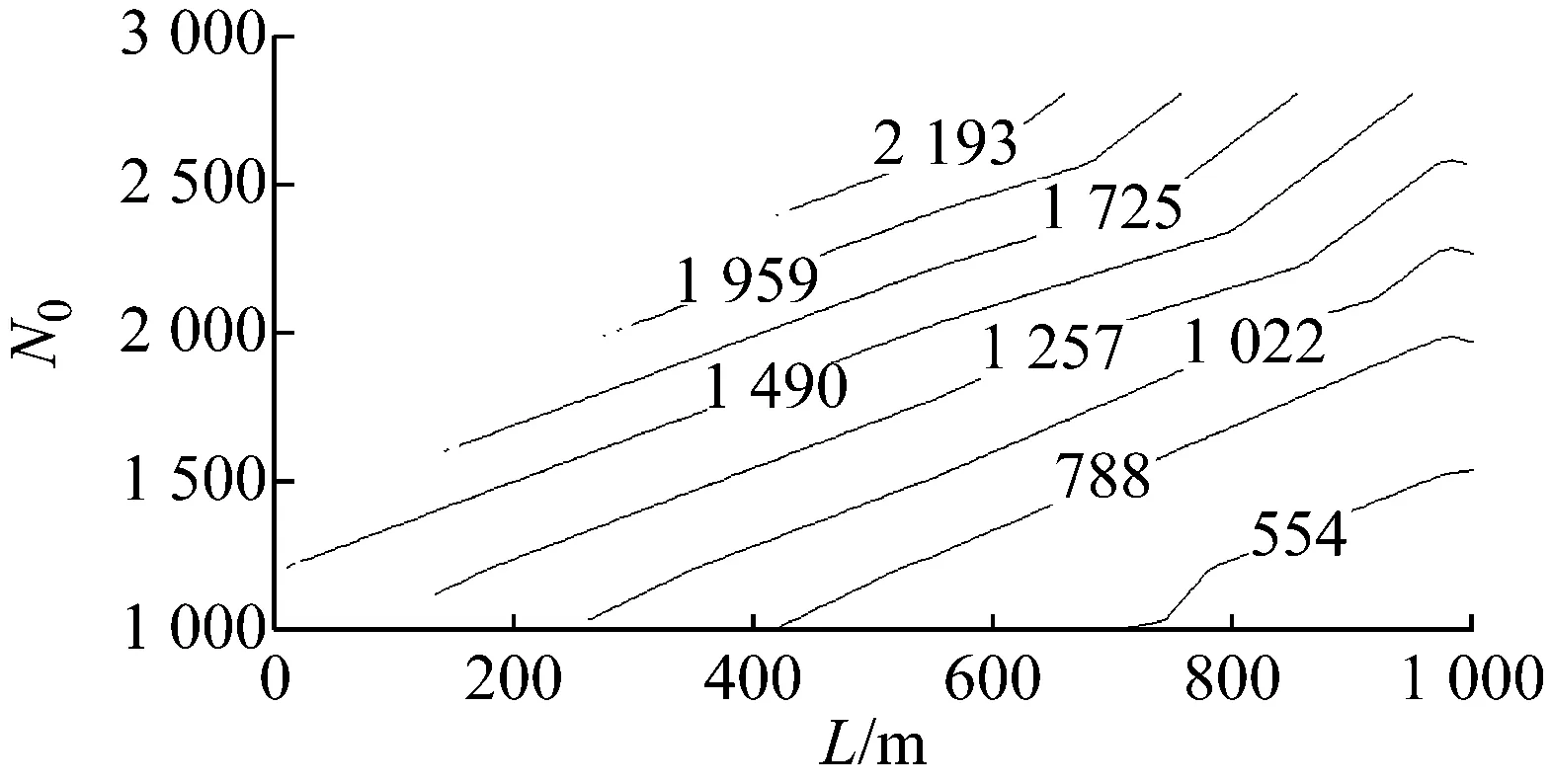
图4 斜率等值线Fig.4 Contour map of slop
2.2 事件与非事件条件下相关性特征分析
由于事件条件难以在实际交通环境下采集到,并且难以在完全相同交通环境下采集不同事件的交通状态,因此为便于比较,采用了仿真手段获取交通数据.利用Vissim进行仿真,时长6 h,设定交通事件发生在第4 h内.交通事件将导致部分路段通行能力下降.事件持续时间分别为1 h、30 min、10 min和0 min(非事件条件),采集点上、下游距离1 km,根据第2.1节的分析结果可以通过控制N0避免互相关系数F过小,保证检测效果.
以事件持续时间30 min为例,绘制整小时内上、下游交通离散时间信号的分布(见图5).从图5可以看到,在4 h时间段上信号互相关系数峰值明显小于其他时间段,即该时间范围内交通流出现比较大的扰动,发生了交通事件.
从图5可知,1 h检测显然过于粗糙,难以及时反映数据变化,因此采用持续更新的方式监测离散时间信号最大互相关系数.当交通流出现扰动时,互相关系数F所在的时间序列相位差可能出现扰动,因此同时监测最大互相关系数所在的时间序列相位差变化,具体流程如图6所示.根据流程绘制事件持续时间分别为1 h、30 min、10 min和0 min的相关性发展图和扰动发展图(见图7、8).相关性发展图代表离散时间信号互相关系数随时间的波动情况,扰动发展图代表互相关系数最高点对应的时间序列相位差随时间的波动情况.从图7、8可以非常明显地看到,发生交通事件后相关性迅速下降,时间序列相位差也发生扰动,并且事件持续时间越久,相关性发展得越低.因此,当前期平稳状态下相关性开始持续走低或时间序列相位差产生明显变化时,判断交通事件发生.
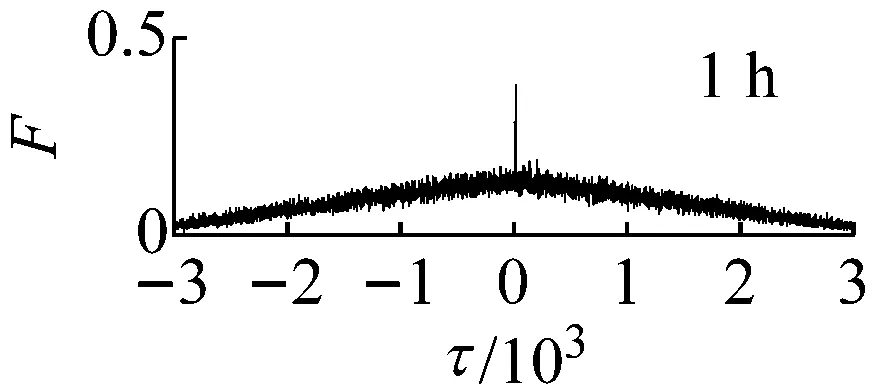
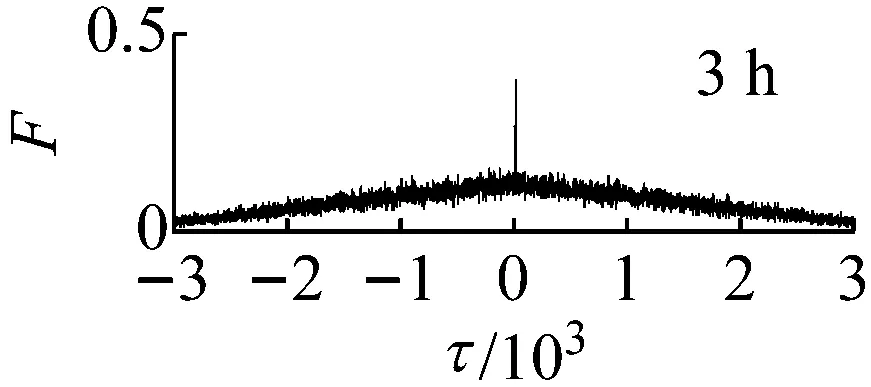
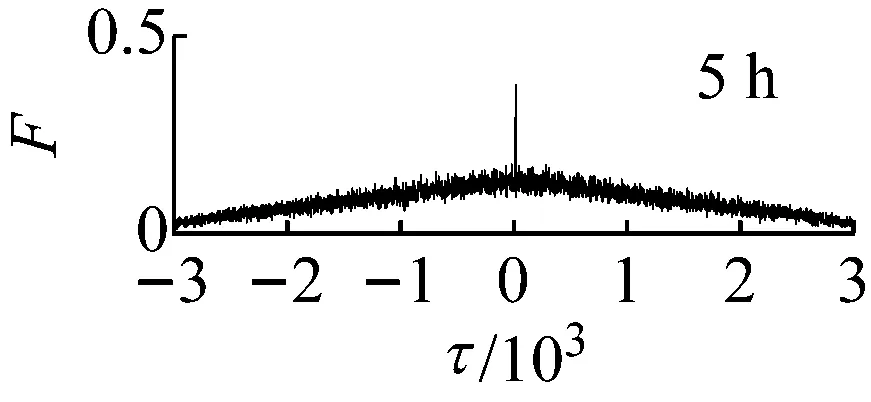
图5 6 h相关系数分布Fig.5 Distribution of correlation coefficient in 6 h
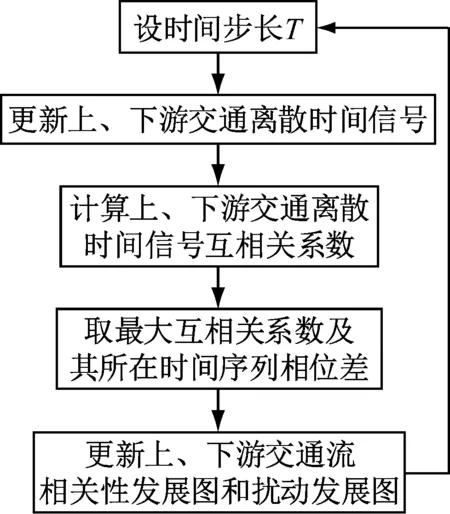
图6 自动交通事件检测流程Fig.6 Flow chart of AID
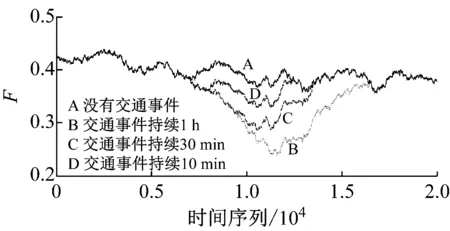
图7 相关性发展图Fig.7 Development of correlation

图8 扰动发展图Fig.8 Development of disturbance
3 交通事件检测试验
3.1 检测试验
AID算法性能的评价指标包括交通事件检测率(DR)、误报率(FAR)和平均检测时间(MTTR).检测率和误报率用于评价AID算法的检测性能,平均检测时间能够评价算法的检测效率.3个指标存在互相制约的关系.
首先利用Vissim分别模拟单向两车道低饱和交通(500 veh·h-1)、中饱和交通(2 500 veh·h-1)和高饱和交通(3 500 veh·h-1)环境下非交通事件50次,以此作为基准,确定判别事件发生的互相关系数及相位差阈值.阈值决定了检测率和误报率,交通事件检测率越高,误报率也越高(见图9).高饱和交通环境下交通事件容易造成堵车或连环交通事故,因此取较高的检测率牺牲了较低的误报率;反之,低饱和交通环境下取相对较低的检测率获得较低的误报率,节约人力.经过对比,3种环境下的互相关系数和相位差阈值分别确定为(0.36, 0)、(0.57, -10)和(0.68, -22).

图9 误报率和检测率关系Fig.9 Relationship between FAR and DR
分别模拟3种交通环境下交通事件条件和非交通事件条件各100次,分别采用加利福尼亚算法和基于离散时间信号相关性检测算法进行评价,评价结果如表1所示.
3.2 结果分析
在低饱和交通环境下,本文算法检测率达97.1%,而加利福尼亚算法仅84.1%;在中饱和交通环境下,本文算法检测率略微下降(96.5%),而加利福尼亚算法升至92.7%;在高饱和交通环境下,2种算法检测率基本持平,在96.0%左右.综合来看,本文算法略高于加利福尼亚算法,由此可以判断,本文算法比加利福尼亚算法具有更加良好的环境适应性.在平均检测时间方面,随着交通饱和度的上升,采集数据量的增加能够缩短时间步长,从而相关性发展图和扰动发展图更新速率提高,本文算法的检测效率也持续提升.
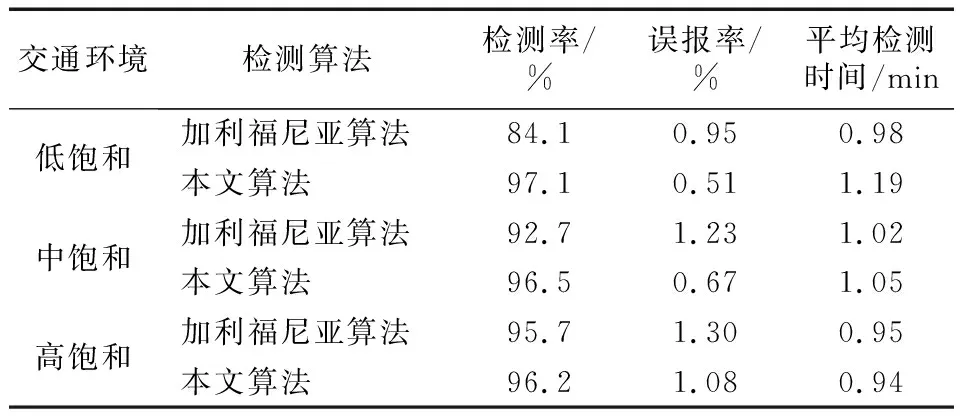
表1 加利福尼亚算法和本文算法的检测效果Tab.1 Performance of Ca algorithm and the proposed algorithm
从表1可以看到,本文提出的算法在低饱和交通环境下性能远好于加利福尼亚算法.随机抽取一个低饱和交通环境下发生交通事件的样本,为方便比较,将数据归一化处理,如图10所示.由图10可知:由于加利福尼亚算法过度依赖上、下游交通占有率,当交通饱和度很低时发生交通事件,即便降低了路段的通行能力,但较小的交通量并不足以造成占有率发生非常明显的变化;本文算法主要依赖于上、下游交通流分布形式,发生交通事件会导致换车道等行为比例升高,相当于使交通流重新分布,从而导致相关性急剧下降,交通流的相位差发生波动.

图10 低饱和交通环境下参数变化Fig.10 Variation of parameters under low saturated traffic environment
以同样方法绘制交通接近饱和时参数对比图,如图11所示.从图11可以看到,加利福尼亚算法在交通量较大的情况下明显比小交通量环境下表现好,说明交通事件引起的通行能力降低影响到了上、下游占有率的分布.车辆受到空间限制,即使重分布,高饱和交通环境交通流分布形式也较低饱和交通环境时选择性小,因此相关性发展图没有低饱和交通环境时明显,但在时间序列上仍然有非常明显的差异,相位差的波动性则表现更加稳健.
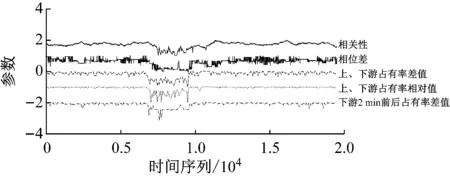
图11 高饱和交通环境下参数变化Fig.11 Variation of parameters under high saturated traffic environment
4 结语
根据信号处理理论,提出了基于离散时间信号相关性的AID算法.将交通信息数据转化为离散时间信号并进行相关性计算,可以有效定位同一组交通流并计算其相似性.通过对照分析解释了互相关系数的特征,并采用仿真数据进行性能验证.结果表明,采用基于离散时间信号相关性的AID算法在低饱和交通环境下表现依然稳健,具有可视性且易于理解.在未来研究中将采集实际高速公路的交通事件条件数据对算法性能进行进一步验证.