基于自然驾驶数据的驾驶员紧急制动行为特征
2018-12-04朱西产沈剑平
吴 斌, 朱西产, 沈剑平
(1.同济大学 汽车学院,上海 201804;2.国家机动车产品质量监督检验中心(上海),上海 201805)
紧急工况下驾驶员行为研究是开发先进驾驶辅助系统(ADAS)的前提.驾驶员在紧急工况下的避撞行为主要分为紧急制动和转向两大类,本文主要研究驾驶员的紧急制动行为特征.纵向避撞系统,如前碰预警系统(FCW)、紧急制动系统(AEB)等,只考虑车辆纵向运动方向上的危险.国内外的研究表明,追尾事故占比很高[1].李霖等[2]对行车记录仪采集到的危险场景进行统计,结果表明追尾危险场景占比20.2%.将追尾危险场景中的驾驶员紧急制动行为特征作为设计开发输入,对建立紧急制动系统、前碰预警系统有重要意义.
目前研究驾驶员紧急制动行为的方法有以下几种:交通事故数据方法、自然驾驶行为方法、场地测试方法、驾驶模拟器试验方法.通过交通事故数据可获取典型事故场景,但得到的车辆参数和驾驶员行为参数并不多,准确性很难保证;场地测试和驾驶模拟器试验也存在缺陷,不能完全与真实交通工况中的场景相对应.随着驾驶行为研究的深入,自然驾驶数据得到了越来越多的重视.自然驾驶行为研究(NDS)是指在不干扰驾驶员行为的前提下记录真实交通环境中驾驶员行为的研究方法[3-4],因此通过自然驾驶工况提取出的驾驶员行为完全是真实的驾驶员行为.不同地区和国家的驾驶员驾驶习惯不同,故有必要研究我国驾驶员在真实交通环境下的紧急制动行为特征.
驾驶员紧急制动行为特征的研究主要集中在紧急制动反应时间和紧急制动输入特性两方面[2].
紧急制动反应时间通常指从潜在危险出现的时刻到驾驶员开始采取某种避让措施的时间段[5].Green[5]的研究表明,驾驶员在追尾事件有完全预期的情况下紧急制动反应时间为0.70~0.75 s,对于突发事件的紧急制动反应时间为1.25 s.Brunson等[6]的研究表明,驾驶员的紧急制动反应时间近似服从对数正态分布,约为1.36 s.Chang等[7]发现车速对驾驶员的紧急制动反应时间有影响,车速从40 km·h-1升高到64 km·h-1,紧急制动反应时间缩短0.5 s.Schweitzer等[8]的研究认为,车速和驾驶员的紧急制动反应时间无相关性.国内外对于紧急制动反应时间的研究较多,但由于测试环境不同,因此得出的研究结果之间差异较大,而且对于真实交通环境下的驾驶员紧急制动反应时间的研究较少.
紧急制动输入特性方面,李霖等[9]对危险场景下驾驶员的制动减速度、制动减速度梯度进行了统计分析,由于采集设备(行车记录仪)的局限性未定量分析影响紧急制动输入特性的因素.Bosetti等[10]通过场地测试对驾驶员在驾驶过程中的纵向和横向加速度范围进行了统计分析,驾驶员的制动减速度分布与车速无关,大部分驾驶员的制动减速度小于3 m·s-2,但未深入研究驾驶员紧急制动场景下的制动输入特性.Smith等[11]、Lee等[12]将路面的最大摩擦力和车辆的极限性能作为驾驶员的最大制动减速度输入,未考虑驾驶员的驾驶习惯.目前基于自然驾驶数据进行驾驶员紧急制动输入特性的研究还不够深入,未针对典型危险场景下驾驶员紧急制动行为特征进行系统性分析.
根据国内外的研究现状,开展兼容我国特殊交通工况的驾驶员紧急制动行为特征研究,是目前开发纵向驾驶辅助系统的难点,也是以人为中心的纵向避撞系统设计和开发的重点.基于中国大型实车路试中的自然驾驶数据,开展驾驶员在典型追尾危险场景下的紧急制动行为特征研究,对驾驶员紧急制动反应时间、最大制动减速度和最大制动减速度梯度进行影响因素分析和概率分布拟合,为开发适合我国驾驶员特征的先进驾驶辅助系统提供依据.
1 自然驾驶数据的采集和筛选
为了研究驾驶员在真实交通环境下的驾驶行为,本文所使用的数据全部来自中国大型实车路试(China-FOT)的自然驾驶数据.China-FOT数据来源有:①汽车总线;②外接传感器,包括独立加速度传感器,用于保证数据的完整性和准确性;③眼动仪,用于记录驾驶员眼球状态,但由于企业保密,不对该类型数据开放;④摄像头,分别为前置摄像头、前置广角摄像头、车内驾驶员面部摄像头、踏板摄像头(见图1).数据采集从人、车、路三方面角度出发,采集驾驶员日常驾驶行为数据、车辆行驶运动状态参数和道路交通环境信息.通过China-FOT项目采集了32名驾驶员的驾驶数据,共计约3 559 h,总行程129 109 km.

图1 自然驾驶数据采集中的摄像头视角Fig.1 Imaging view of the cameras in naturalistic driving data collection
本文主要通过车辆的制动减速度、制动减速度梯度、横向加速度、驾驶员方向盘转速等4个参数,对自然驾驶数据进行危险场景的筛选[13].本文中制动减速度和制动减速度梯度数值均用负值表示.驾驶员紧急制动场景的筛选参数等级划分如表1所示.
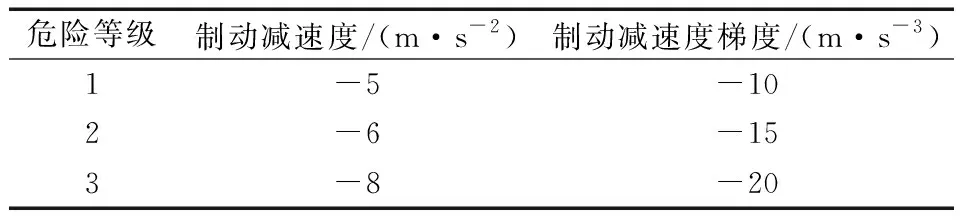
表1 紧急制动场景的筛选参数Tab.1 Filter parameters of emergency braking scenarios
通过上述筛选方法,得到共780例危险工况,其中直行追尾危险工况占比最高(43.83%),也是目前ADAS研究的主要危险场景.本文选取危险等级较高的紧急制动工况121例(排除了部分危险程度较低以及数据不全的工况).
2 驾驶员紧急制动操纵的参数拟合
在紧急工况下驾驶员纵向制动操纵的减速度峰值较高,制动减速度梯度也保持恒定.Markkula等[14]对驾驶员制动减速度模型的分析和对比结果表明,延时恒定减速度模型能更好地拟合驾驶员在紧急情况下的制动操纵,即在一定的制动反应时间延迟后驾驶员以某一制动减速度梯度制动,达到最大制动减速度后保持制动减速度不变至停车.
为了统一提取危险工况下驾驶员操纵参数,利用如图2所示的延时恒定减速度模型来拟合驾驶员的制动减速度操纵.如图2所示,T0为驾驶员紧急制动起始时刻,在模型中定为零时刻;a0为初始纵向加速度,aL为最大制动减速度.
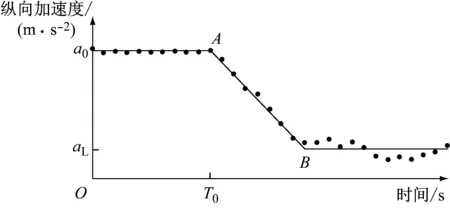
图2 驾驶员紧急制动模型Fig.2 Driver model for emergency braking
根据自然驾驶数据中驾驶员紧急制动反应时间和驾驶员紧急制动输入特性数据,可以构建出驾驶员在危险工况中的紧急制动避撞延时恒定减速度模型参数.
表2是工况A1231和A1277的相关参数,图3和图4是工况A1231和A1277减速度拟合结果.从表2和图3、4可以看出,总体上驾驶工况的拟合效果较好,拟合系数的R2均值在0.85以上.
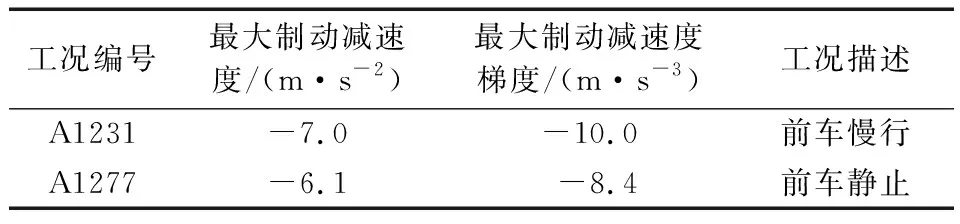
表2 工况A1231和A1277的相关参数和描述Tab.2 Parameters and description of case A1231 and A1277
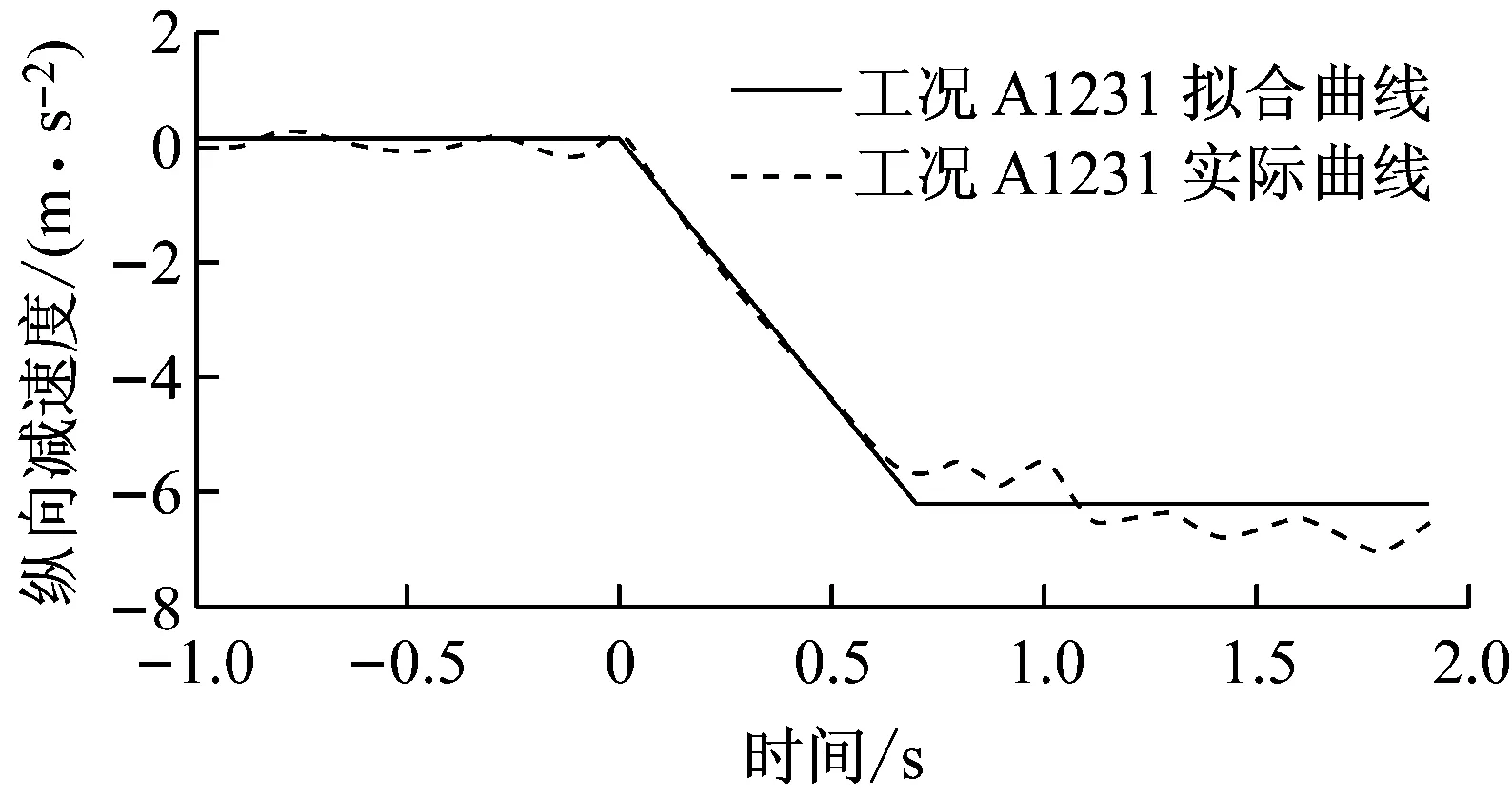
图3 工况A1231纵向减速度拟合情况Fig.3 Fitting results of deceleration for case A1231
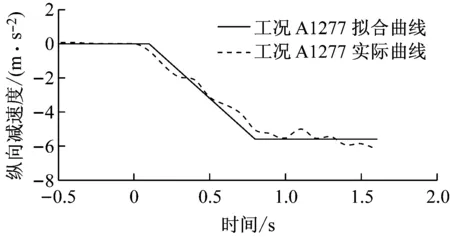
图4 工况A1277纵向减速度拟合情况Fig.4 Fitting results of deceleration for case A1277
3 驾驶员紧急制动反应时间
T0为紧急制动起始时刻,实际上由于车辆制动系统响应带来的延迟,因此驾驶员开始制动的时刻比T0更早.将制动系统响应的延迟时间视为驾驶员紧急制动反应时间的一部分[4],驾驶员紧急制动反应时间还包含驾驶员神经滞后和惯性滞后,本文不再细分.
121例追尾危险场景的分类如表3所示.前车突然减速制动的追尾危险工况类型共70例,占58%,此场景下前车制动灯常亮;前车静止或慢速的追尾危险工况类型共51例,占42%,在此场景下前车的制动灯并不是常亮.
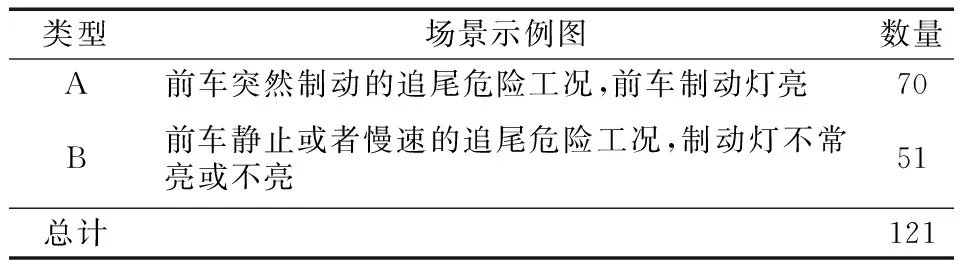
表3 追尾危险场景的分类Tab.3 Category of rear-end scenarios
3.1 紧急制动场景的环境参量划分

为了获得紧急制动危险场景下的TTC分布,对紧急制动场景下的TTC分布进行数据统计分析.在驾驶舒适区域,驾驶员一般保持跟车或自由驾驶状态,此时本车与前车的TTC趋于无穷大;当前车制动或慢行时,TTC逐渐变小,进入驾驶冲突区域.在驾驶冲突区域如果环境条件允许,驾驶员就会采用变道来保证通行效率或者制动减速来避免碰撞;如果驾驶员一开始未采取合适措施,TTC进一步变小,进入驾驶危险区域,最后驾驶员就必须采取紧急避撞措施.驾驶舒适区域和冲突区域属于驾驶员正常驾驶工况.
根据上述分析随机选取正常驾驶状态中的变道工况80例,并提取变道时的TTC.图5为80例正常变道工况与121例紧急制动工况TTC分布情况,利用支持向量机的界限分割方法划分正常工况与紧急制动工况的TTC边界,可知紧急制动工况的Tttc<5.0 s.
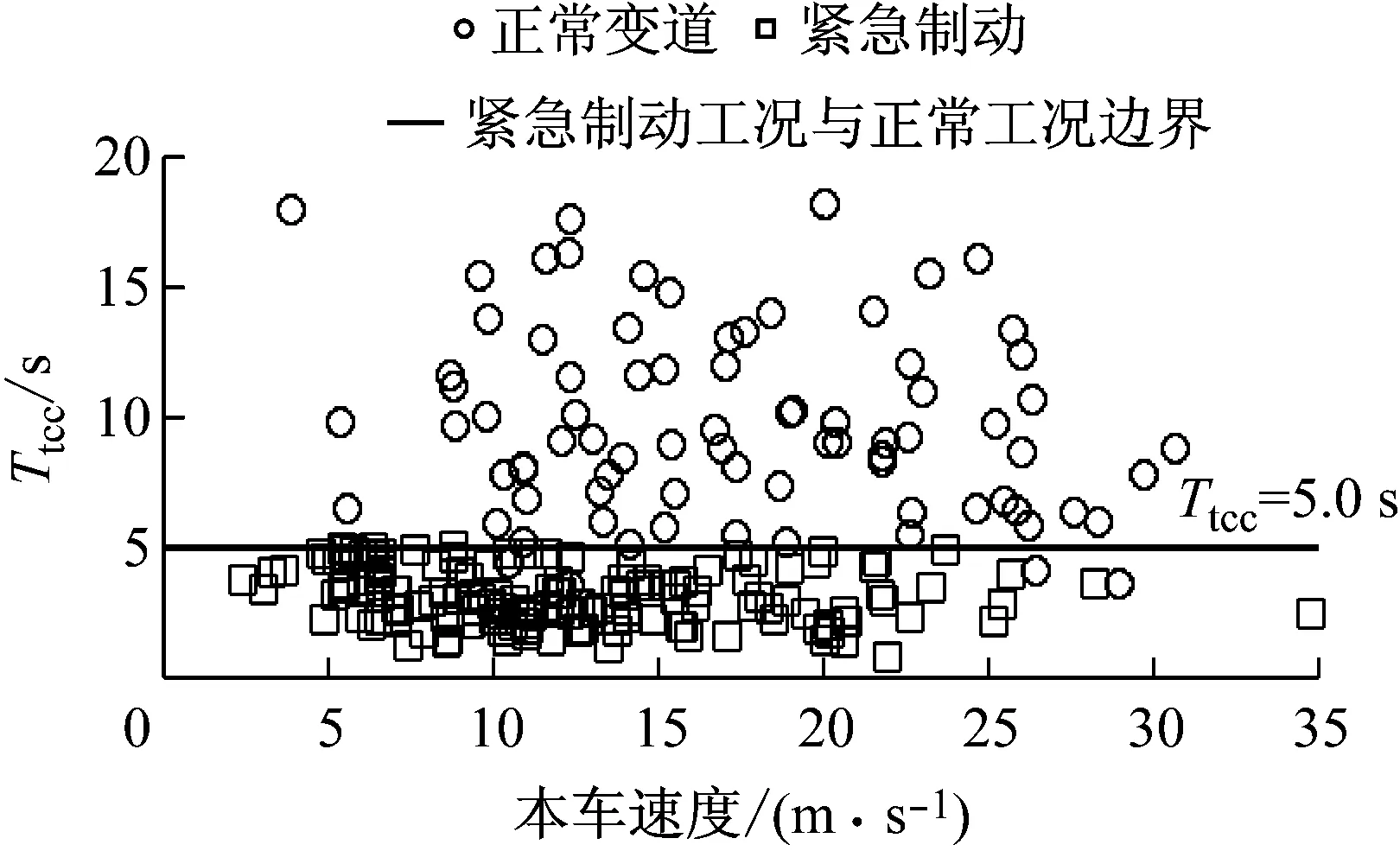
图5 紧急制动场景的TTC分布Fig.5 TTC distribution of emergency braking scenarios
3.2 不同场景的紧急制动反应时间分布
根据前述追尾危险场景危险出现时刻的定义,以及紧急制动拟合的制动开始时刻T0,分析121例直行追尾危险工况的紧急制动反应时间分布.
图6为70例前车突然制动的追尾危险工况下驾驶员紧急制动反应时间分布,其中n、u、σ分别为对数正态分布拟合的样本数、均值和标准差.从前车制动灯亮到驾驶员开始制动时刻的持续时间为驾驶员的紧急制动反应时间,对其进行对数正态分布拟合,拟合相关系数R=0.80,与Brunson等[6]、李霖等[2]的研究结论一致.对于70例前车减速制动的追尾危险工况,驾驶员的紧急制动反应时间分布较分散,对数正态分布的均值为1.96 s,有些工况驾驶员紧急制动反应时间甚至在4.00 s以上.
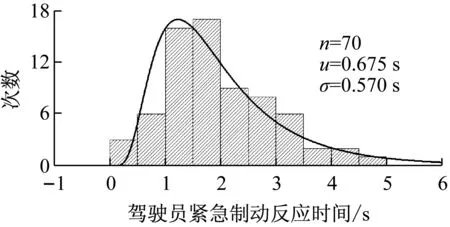
图6 追尾危险场景A中驾驶员紧急制动反应时间分布及拟合
Fig.6Distributionandfittingresultsofdriver’semergencybrakingresponsetimeinrear-endscenarioA

Fig.7Distributionandfittingresultsofdriver’semergencybrakingresponsetimeinrear-endscenarioB
3.3 紧急制动反应时间和的关系



图到T0的持续时间分布及拟合Fig.9 Distribution and fitting results of time from s-1 to braking onset T0
在研究紧急制动反应时间时,国内外大部分学者将紧急制动反应时间理解为驾驶员在大脑中处理观察到的信息,然后做出制动操纵行为的时间过程.通过上述分析,驾驶员的紧急制动反应时间与车辆之间的运动关系密切相关,当车辆的相对运动关系达到一定的危险触发阈值时,驾驶员便会迅速采取紧急制动措施.
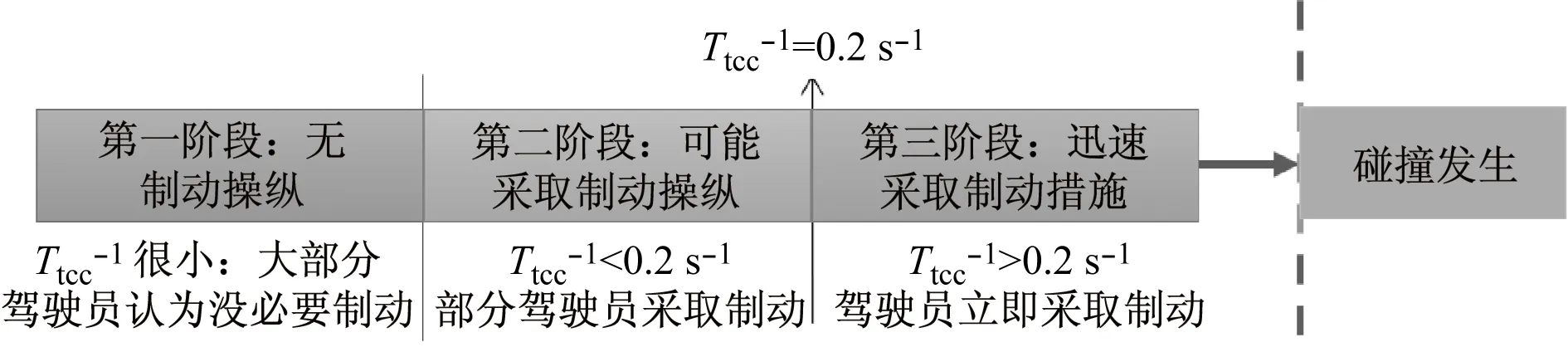
图10 驾驶员紧急制动反应的3个阶段Fig.10 Three phases of driver’s emergency braking response

4 驾驶员紧急制动输入特性
4.1 驾驶员紧急制动输入特性的统计分析
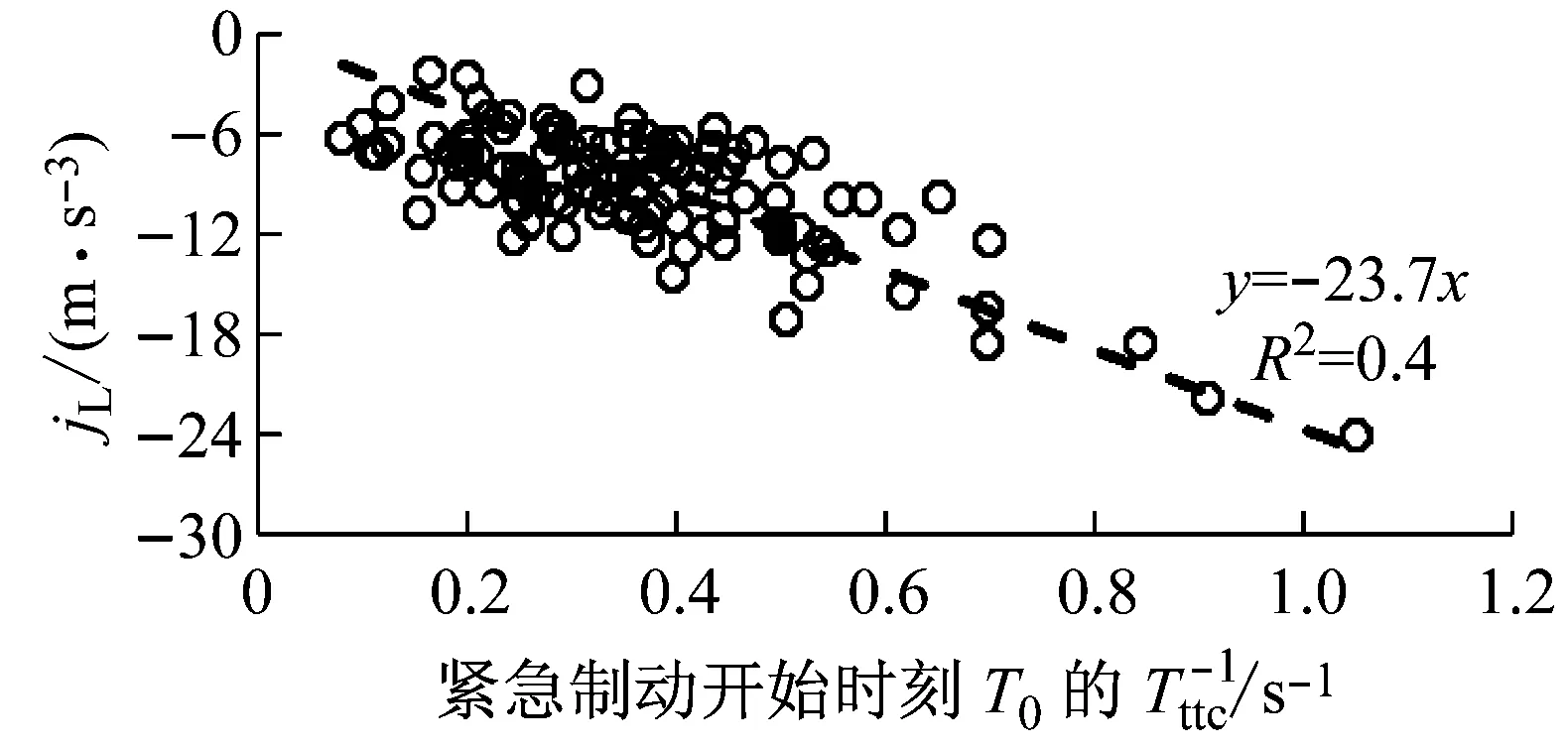
采用驾驶员紧急制动拟合方法,提取制动减速度和制动减速度梯度进行紧急制动输入特性研究.
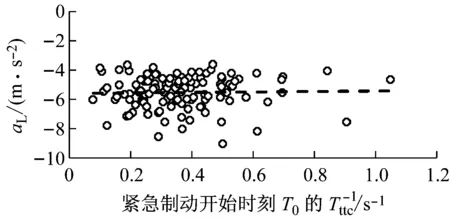
图11 最大制动减速度与紧急制动开始时刻T0的Tttc-1关系

4.2 驾驶员紧急制动输入的概率分布与讨论
驾驶员的最大制动减速度与驾驶工况紧急程度无关.通过自然驾驶数据的视频分析可知,在危险驾驶工况下从紧急制动到脱离碰撞危险时,驾驶员通常不再增加制动减速度.在同一驾驶工况下,脱离危险时与前车之间的相对位置等受驾驶员驾驶风格影响较大.

在紧急制动工况下未发生碰撞,驾驶员的制动过程在其操控能力范围内,是驾驶员在意识到危险存在时的正确反应,反映了驾驶员在这些工况下的预期.在大部分危险工况下车辆的最大制动减速度都未达到车辆或路面的极限情况,故以车辆物理极限来设计的驾驶辅助系统是不合理的,需要考虑驾驶员的紧急制动特征,如图11所示.
利用正态分布对最大制动减速度aL进行拟合(见图13),正态分布均值u=-6.1 m·s-2,标准差σ=1.2 m·s-2.
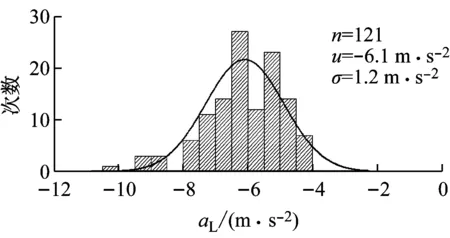
图13 最大制动减速度分布及拟合
Fig.13Distributionandfittingresultsofdriver’smaximumbrakingdeceleration
(1)
驾驶辅助系统通过KB可以预判驾驶员在危险工况下的紧急制动行为,从而估计驾驶员是否能够合理避免碰撞的发生;另一方面,KB的取值也可根据驾驶员的不同驾驶习惯进行调整,使得驾驶辅助系统更加拟人化.
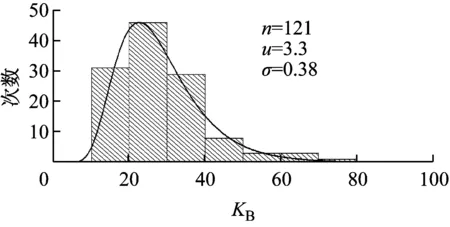
图14 线性放大因子KB的分布及拟合
Fig.14DistributionandfittingresultsoflinearscalingfactorKB
5 结语