基于GPS/BDS的四旋翼无人机导航研究与实现∗
2018-11-26王宏凯赵屹男黄业凯
王宏凯 钟 斌 赵屹男 黄业凯
(海军工程大学 武汉 430033)
1 引言
随着高新技术信息化程度的快速发展,无人机所发挥的作用越来越受到人们的关注,其在民用领域和军事领域得到广泛应用。无人机要实现稳定飞行必须有定位方式,全球卫星导航系统不仅可以提供三维位置和三维速度信息,还能利用相应的数据处理技术和多个天线,实现载体的航向角实时测量,该技术测量精度高、没有时间累计误差,是一种理想的航向测量手段[1]。目前市场上卫星定位方式主要采用全球定位系统(global positioning system,GPS)定位。考虑到有限资源的竞争以及电子战、电磁战等各种干扰信号的出现,卫星导航技术在未来的应用,尤其是军事应用中将会受到极大的限制[2]。随着北斗卫星导航系统(BeiDou navigation satellite system,BDS)的逐步完善,其应用研究正在成为热点。但由于单一导航系统难以满足无人飞行器的发展要求[3],于是产生了把2种或2种以上的不同导航系统以适当的方式组合在一起的组合导航方式,比使用单一导航系统具有更高的系统性能[4]。因此研究GPS/BDS双模导航定位,既可以提高定位精度,又可以减小对GPS的依赖。
本文以四旋翼无人机为研究对象,利用GPS/BDS双模模块实现四旋翼无人机导航定位,大大提高了导航定位精度,并对精度分析研究。
2 定位解算方法
通过研究BDS/GPS共同组成的双模导航定位系统,可很大程度上增加接收机可观测卫星的数目以有利于组成最佳几何分布。通过这种方式可以大幅提高定位精度及可靠性[5]。
2.1 单系统下用户位置解算
GPS利用到达时间来进行对用户位置到卫星端距离的测算。卫星信号从卫星传递到用户接收机所用的时间,可以用时间乘以光速获得伪距。但是由于本地时钟与系统时钟同步十分困难,因此想直接通过这种方法实现测距是难以现实的[6]。这时就需要结合4个卫星坐标:A1(x1,y1,z1) 、A2(x2,y2,z2)、A3(x3,y3,z3)及A4(x4,y4,z4),加上一个用户接收机坐标Au(xu,yu,zu)以及用户时钟同系统时钟偏差,可以得出4个伪距测量值,得到的伪距方程为
式中:ρ1、ρ2、ρ3、ρ4为卫星至接收机之间的伪距;c为电波传播速度;tu为接收机用户钟误差。
伪距方程组的意义是指以每颗卫星为球心,用户的位置一定就在以伪距观测值为半径的球面上的一点。通过定位4颗球面交点的位置,可以获得用户接收机所处地点的坐标。
2.2 双模导航系统定位求解方法
借用单模定位导航系统的定位原理可以推导双系统定位的原理。双模定位导航系统需要同时接收BDS及GPS的卫星信号,BDS以及GPS系统有其各自的时间系统,会产生时间测量值偏差,这就会多出一个时间偏差未知量。就需要多出一组伪距观测值才能对用户位置进行解算,所以也就导致需要增加一个伪距方程。得到单系统的定位方程为
式中:y表示( )m×1维的测量向量;H表示几何观测矩阵;ε表示测量误差向量,x为用户的状态向量。BDS和GPS系统的观测方程可分别表示为
设n和m分别为BDS以及GPS当前的星座中采用卫星数目,则可得BDS/GPS双模定位导航系统的伪距观测模型为
式中:HBD为BDS卫星同用户之间的几何观测矩阵;1BD表示元素为1的n维列矢量;0BD表示元素为0的n维列矢量;εBD表示n维伪距误差的列向量。同理,GPS表达式中各项的含义参照BDS。x=[xuyuzuΔtBDΔtGPS]T表示的是用户的5维状态矢量,其中xu、yu、zu表示的是用户位置在坐标系当中的测量位置,ΔtBD、ΔtGPS均表示两个系统与自身接收机钟差所造成的距离误差项。利用YCO,HCO,xCO,εCO对原式进行简化,从而可以得到简化的GPS/BDS双模定位系统的定位方程为
使用最小二乘法来对其进行求解从而使各个函数值与实际测量值之差的平方和最小,解是最优的。使用加权最小二乘法是在最小二乘法的基础上对数据中的相关性以及测量误差向量的方差信息等做了优化,它并不依赖接收机的性能指标,受接收机位置影响较小。加权最小二乘法针对具有异方差性的模型,需要发展新的方法估计模型时具有十分出色的优化效果。它主要是通过对原模型进行加权,使之变为新的不存在异方差性的模型,然后采用普通最小二乘法估计其参数。
省略对流层以及电离层等系统延时所产生的伪距误差,将BDS和GPS双模系统的伪距数学模型整理成伪距形式为
其 中 Δρj=ρj-,ˆ 为 将 近 似 位 置( )xˆu,yˆu,zˆu和钟差估计值 tˆu代入式(1)得到的第 j颗 卫 星 的 伪 距 ,Δx=xu-ˆ ,Δy=yu-ˆ ,Δz=zu-,Δt=tu-,axj、ayj、azj为由近似位置指向第j颗卫星的方向余弦。
所以使用本节的解算方法,可以得到的解为
为了获得精度更高的解,需要使用加权乘法来对数据进行处理,在这里增加一个权系矩阵W ,W为正定对称矩阵,将上式转化计算后得到
此时,得到的Δx便为双模导航定位系统得到的最终定位结果。
3 实验过程
3.1 软硬件系统介绍
实验中用到了如下的软件和设备:软件Mission Planner(APM地面软件站)用于对无人机进行开发和飞行控制程序的下载。主要用于地面人员对无人机的远程监控与管理。
它主要具备以下几个功能:参数设置功能,飞行监控功能,地图导航等功能。
U-center是用于GNSS的测评软件,可以测评卫星定位精度、对卫星精度分析,也可用于修改导航定位模块参数。
硬件:四旋翼无人机。主芯片Atmega2560控制器是ATMEGA系列AVR单片机中的一款。
测量模块:MPU 6050,它集成了三轴MEMS加速度计和三轴MEMS陀螺仪以及一个可扩展的数字运动处理器DMP(Digital Motion Processor)。
空气压力传感器:使用BMP085芯片作为空压计。
无线数据传输模块:利用无线网络建立地面控制站与飞行器的通信链路,它是四旋翼无人机的重要组成部分。
导航模块:UBLOX-NEO-M8N-001模块,它是GPS/BDS双模导航模块。
3.2 无人机飞行试验
实验利用APM2.6的上位软件Mission Planner对飞行控制板控制程序进行下载。在修改GPS/BDS模块的波特率和卫星系统的过程中,采用U-center软件对导航模块进行测试,可以防止在切换卫星系统后不能正常工作。同时在测试卫星系统时可以对卫星系统的性能做比较,可作为后文精度对比的参考。
通过检测可以得出单一卫星系统,BDS搜索到的卫星要比GPS的多一些,但GPS要比BDS卫星信号质量好且精度高。双卫星系统具有比单一卫星系统搜星能力好、精度高的特点。
GPS/BDS测试图如图1所示。
在完成固件下载及系统调试之后,就可以进行室外飞行试验。在开始飞行之前,首先应该搭建一个稳定、可靠的飞行实验平台。下面是飞行试验平台搭建及试验的具体步骤,图2为流程图,图3~图5为航迹图,实验时间为2017年4月12日上午。
4 数据采集与精度比较分析
本文采用UBLOX-NEO-M8N-001模块,它是GPS/BDS双模导航模块。同一模块可以通过软件自由切换卫星系统,这样就避免了做工造成的精度误差。由于技术原因,此模块不具备存储航行数据的功能,所以本文采用APM2.6记录飞行定位数据。这样就能保证同时采集到GPS和BDS的定位数据。本文在进行飞行测试时,做到接近连续分别对GPS和BDS的定位数据进行采集,尽可能减小由于采集时间不同引起的误差,使数据在有效范围内[7,13]。
精度衰减因子(dilution of precision,DOP)反映了卫星的几何分布对定位误差的影响,是衡量导航系统性能的重要指标。观测条件较差的情况下,单一系统的卫星可见性减弱,DOP值偏大,导航定位精度降低[8~9]。而组合卫星导航系统增加了可见卫星数,可以改善卫星系统DOP值。在比较卫星定位精度时,主要用钟差精度因子(time dilution of precision,TDOP)、3维精度因子(position dilution of precision,PDOP)、垂直分量精度因子(vertical dilution of precision,VDOP)、几何精度因子(geometric dilution precision,GDOP)、水平分量精度因子(horizontal dilution of precision,HDOP)对卫星精度进行比较。在相同测量误差条件下,DOP值越小,意味着可能较小的误差[10~12]。
除此之外,可视卫星数也可以衡量卫星系统的定位好坏。捕捉到的可视卫星数目越多意味着定位的效果可能越好。本文主要是比较在水平位置的精度,因此本文主要对可视卫星数和HDOP值进行采集。
通过飞行实验,本文分别对GPS导航系统、BDS导航系统和GPS/BDS组合导航系统的可视卫星数和HDOP值采集分析,实现对三者导航定位性能的评估。下面是无人机在飞行过程中可视卫星数的变化,如图6~图8所示。
从可见卫星数上可以看出,四旋翼飞行器在运动过程中,GPS的可见卫星数大约在8~9颗,BDS的可见卫星数大约在10~11颗,而GPS/BDS组合导航下的可见卫星数大约在19~20颗。这说明了在GPS/BDS导航定位横向比较中,BDS的可见卫星数比较多而且较稳定,说明GPS/BDS在本地区具有更强的信号。另一方面,在比较单一卫星导航系统和GPS/BDS组合导航系统时,GPS/BDS组合导航系统在可视卫星数量上远超于单一定位卫星导航系统,同时也具有较好的稳定性。图9~图11是无人机飞行过程HDOP的变化。
从HDOP值上可以看出,GPS的HDOP值范围在1.62~1.94内,BDS的HDOP值范围在1.75~1.90内,而GPS/BDS组合导航时的HDOP值范围在1.18~1.44内。这说明了,在横向比较GPS/BDS的HDOP值时,GPS的HDOP值要比BDS的小,同时从HDOP值小于1.7的时间上看,GPS明显优于BDS。
另一方面,在纵向比较单一卫星导航系统和GPS/BDS组合导航系统的HDOP值时,GPS/BDS组合导航系统HDOP值远小于单一的卫星导航系统的HDOP值,并且波动范围也相对较小,这说明GPS/BDS组合导航系统在精度上比单一导航系统的精度要好。本文试验的结果与模块的测试结果相符,实现3种组合导航系统定位性能的评估。表2为GPS、BDS和GPS/BDS的定位参数对比。
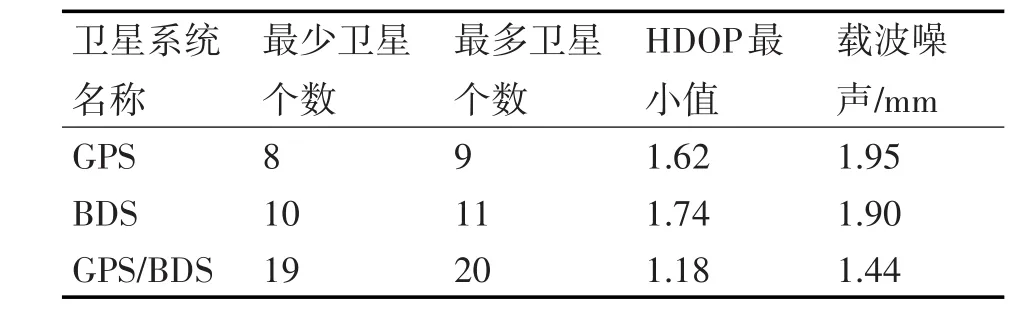
表2 GPS、BDS和GPS/BDS的定位参数对比
从表2可以看出:BDS相比GPS,增加了地球静止同步轨道卫星,在中国及周边区域附近,BDS的搜星能力要比GPS的好。但GPS的空间几何结构更好,GPS定位精度较高。因此可以结合两者的优点,利用GPS/BDS组合导航,使卫星星座构成更好的结构,这样在卫星可见性和HDOP值方面都比单一系统有很大改善。尤其是在观测条件较差时,改善作用更为明显。一方面,降低丢星的概率,使可视卫星数目更稳定,另一方面提高了定位精度。
5 结语
通过搭建包含四旋翼无人机的最小试验系统,表明对于传统的单一卫星导航定位,在可见卫星数方面,BDS(10~11颗)优于GPS(8~9颗),BDS的可见卫星数比较多而且较稳定;在HDOP值上,从HDOP值小于1.7的时间来看,GPS(1.62~1.94)有比BDS(1.75~1.90)较明显的优势。而GPS/BDS组合导航在可视卫星数(19颗)、HDOP值(1.18~1.44)方面结合单一卫星导航定位的优势,具有最好的导航定位效果,从一定程度上改善了四旋翼无人机导航定位精度较低的问题,是理想的双模组合导航定位系统。鉴于篇幅有限,本文只着重对可视卫星数和HDOP值进行采集和比较,并未对其他精度因子进行论述,在接下来的研究中可针对GPS/BDS组合导航的整体效果进行分析。
随着BDS导航系统的迅速发展和目前多模系统研究的发展变化,可以预见,搭载多模系统的无人机可在远程位置浮标定位监控,基于无人机的航拍或气象信息收集,落水海员迅速救援等诸多方面发挥重要作用。
