利用气液协调控制的车辆稳定性控制系统设计
2018-11-06吴乙万陈正强
吴乙万,杨 康,陈正强,李 凡
(1. 福州大学机械工程及自动化学院,福建 福州 350116; 2. 湖南大学汽车车身先进设计制造国家重点实验室,湖南 长沙 410082)
0 引言
如何提高高速工况下车辆的稳定性是汽车安全领域当前面临的主要技术难题. 车辆与环境之间的传力途径为地面和空气,改变车辆运动状态所需的力/力矩只能通过轮胎力和空气动力两方面来产生. 已有的研究主要集中于采用转向[1-2]、制动(ESP)[3-4]、驱动[5-6]等途径对车辆行驶状态进行主动干预以改善车辆稳定性,但存在极限工况下轮胎工作负荷过大且易饱和的不足之处.
改变车辆动力学状态的另一个途径是主动控制车辆所受的气动力/力矩. Savkoor等[7-9]首次提出将空气阻力用于改善车辆的操纵性. Corno等[10-11]则在原理上探索在簧载质量和非簧载质量上分别安装主动风翼板对高速工况下车辆的附着力和舒适性的改善效果. Shibue等[12]提出采用附加等效刚度的概念表示车辆受到的气动力和力矩,并用于车辆动力学的分析. 陆文昌等[13]分析表明高速制动工况下后扰流板展开到最大角度对车辆的制动效能有明显提升的作用,有效减小制动时间和制动距离. Porsche 911上安装的主动空气动力学控制系统是由两组直流电机驱动传动机构实现尾翼高度和角度的自适应调整,在高速工况下可主动调节车辆的气动升力[14]. 帕加尼公司生产的Zonda则通过控制引擎盖上风翼板的开度主动调节车辆受到的气动阻力,从而改善车辆的制动性能.
利用高速工况下车辆受到的气动力/力矩改善轮胎工作负荷,忽略气动执行机构对车辆外观的影响,从空气动力学的角度出发,在原理上探索采用主动气动控制与液压差动制动协调控制以提高车辆稳定性的新途径. 以主动气动控制的车辆稳定性控制系统为研究对象,在高速工况下通过协调主动气动控制和差动制动控制,主动调节主动风翼板攻角和轮缸制动压力,实现车辆受到的气动力/力矩和差动制动力矩的主动控制,搭建Carsim/Simulink联合仿真平台并通过仿真分析以验证所提控制方法的有效性.
1 车辆气动特性分析
MIRA模型组[15]是国际公认的标准模型,被广泛应用于车辆气动特性的研究. 在MIRA标准模型的基础上,选用两个翼型型号为4412的翼板作为主动气动控制的执行机构. 若将主动翼板安装在车辆的前部,会阻碍驾驶员的视野,不利于安全行驶; 若将主动翼板安装在车辆的尾部,仅能改变尾部的垂直载荷; 因车顶部面积较大,故将主动翼板安装在车辆顶部. 利用UG建立MIRA标准车辆模型和主动气动外形系统的三维建模,用ANSYS/Fluent对比分析翼板未开启(攻角θ为0,如图1(a)所示)和单侧翼板开启(攻角不为0,如图1(b)所示)时车辆的气动特性,分析结果如图2所示.
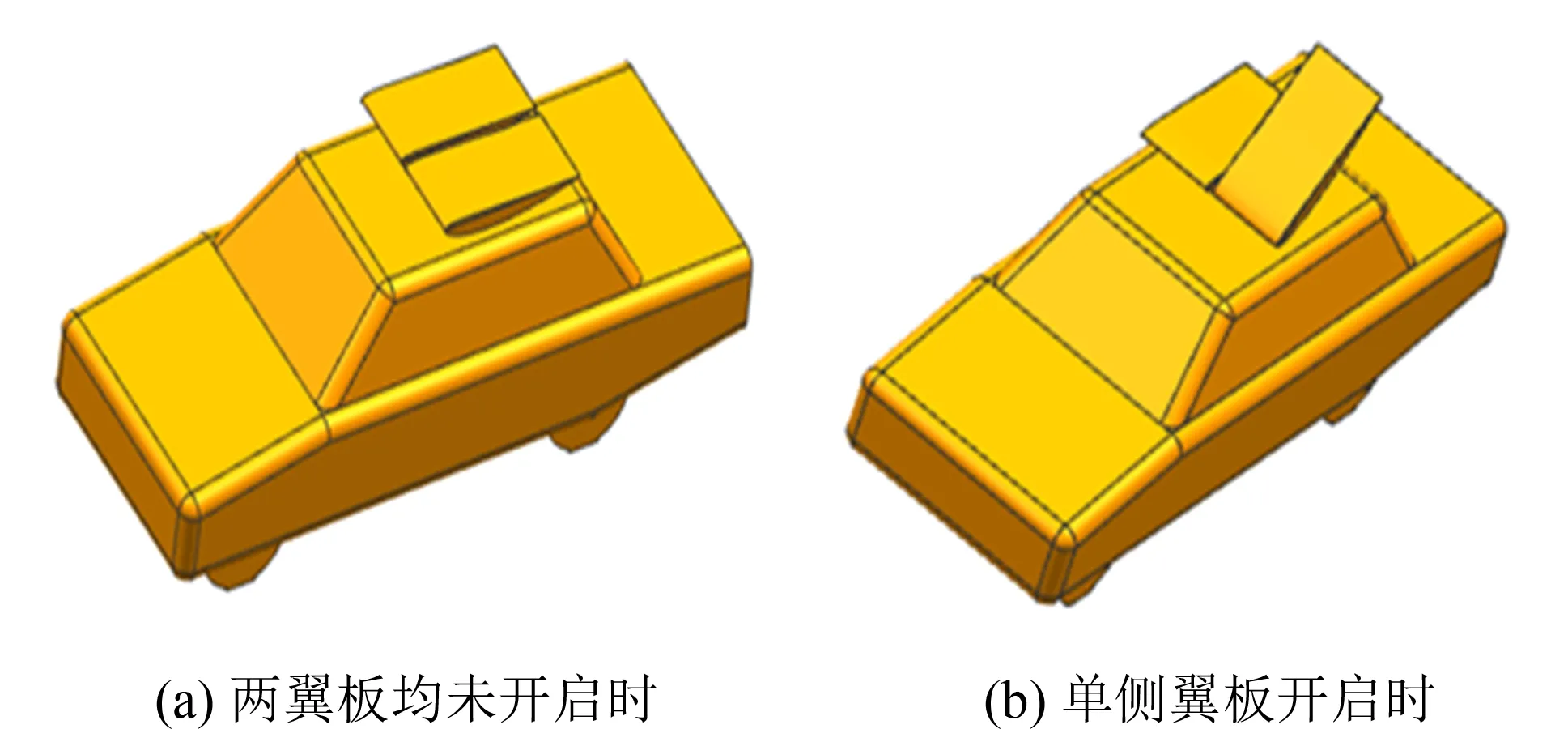
图1 MIRA模型Fig.1 MIRA model
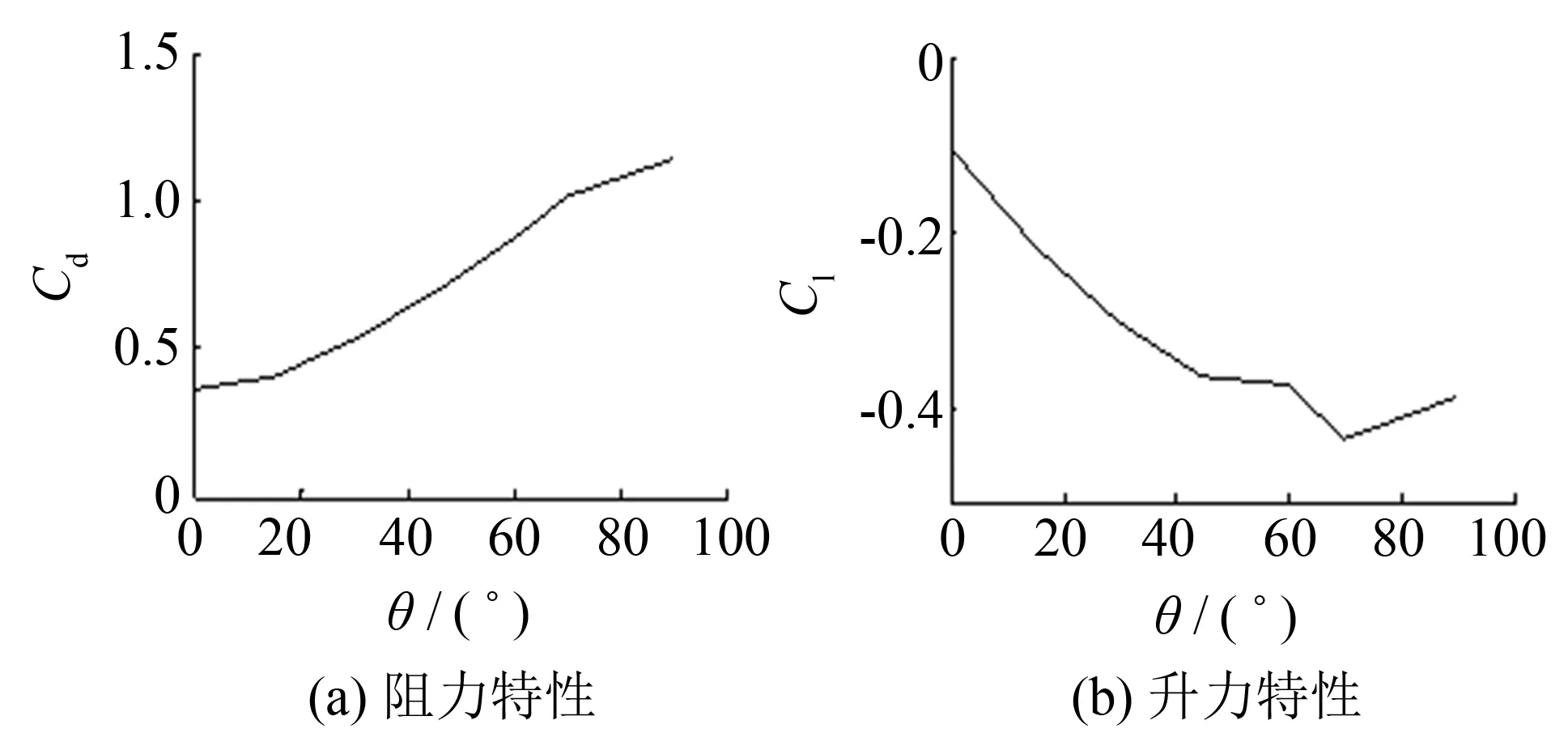
图2 气动系数随攻角变化图Fig.2 Aerodynamic coefficients with the angle of attack
单侧翼板开启时,车辆受到的气动阻力(Fd)、升力(Fl)、气动横摆力矩(Ma)为:
(1)
式中:θ为目标侧翼板攻角;Cd、Cl分别为车辆的气动阻力系数、升力系数,均为翼板攻角的函数(如图2所示); A为车辆迎风面积,其亦为翼板攻角的函数;ρ为空气密度;V为车辆和周围气流的相对速度;Fd(0)为翼板均未开启时车辆的气动阻力;la为翼板中心点与车辆纵向对称面的垂直距离.
2 车辆稳定性控制系统设计
设计的车辆稳定性控制系统结构框图如图3所示,主要包括车辆运动状态规划、模糊控制器、力矩协调控制、差动制动控制和主动气动控制等模块. 其中:Pfl、Pfr、Prl、Prr分别为左前轮压力、右前轮压力、左后轮压力、右后轮压力. 车辆运动状态规划模块根据车辆运动状态和路面附着实时决策出保持车辆稳定的理想运动状态. 模糊控制器利用实际横摆角速度与期望横摆角速度的偏差,根据模糊规则计算实现车辆运动状态跟随所需的辅助横摆力矩Mz. 力矩协调控制模块则根据车辆运动状态、横摆力矩的符号和数值大小来协调差动制动和主动气动控制以产生辅助横摆力矩.
2.1 车辆运动状态规划
选用二自由度单轨车辆模型(如图4所示)作为车辆稳定性控制的参考模型.
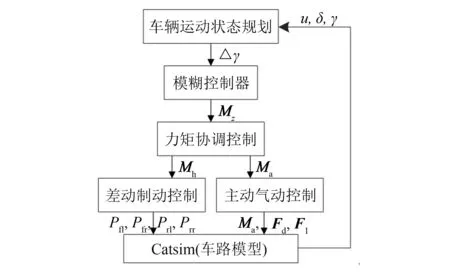
图3 控制系统框图Fig.3 Architecture of the control system
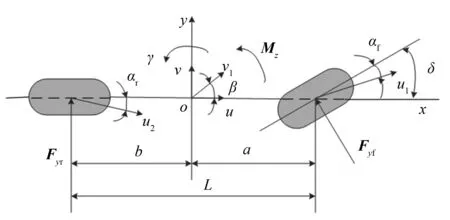
图4 二自由度单轨车辆模型Fig.4 2-DOF vehicle model

(3)

对于二自由度单轨车辆模型,由车轮转角、车速及其他一些整车参数可计算出理想的横摆角速度γi为:
(4)
考虑路面附着情况的约束, 则横摆角速度极限γlim为:
γlim=0.85μg·u-1
(5)
其中:μ为路面附着系数;g为重力加速度. 因此,期望的横摆角速度γd为:
γd=min(|γi|, |γlim|)sgn(γi)
(6)
2.2 模糊控制器设计
实际车辆为典型的非线性系统,在模糊控制器的设计中不需要建立被控对象的精确数学模型,且具有较强的鲁棒性. 因此采用模糊控制方法设计双输入单输出的控制器,以实时计算出车辆跟踪期望横摆响应所需的辅助横摆力矩. 以实际横摆角速度与期望横摆角速度的差值(Δγ)及其微分(d(Δγ)/dt)作为模糊控制器的输入. Δγ与d(Δγ)/dt模糊化后论域为[-6 6],横摆力矩模糊化论域为[-10 10],其中输出横摆力矩的增益为280. 输入和输出的语言模糊子集均为{nb、nm、ns、z、ps、pm、pb}. 输入的隶属函数采用三角型函数,输出的隶属函数采用高斯型函数,分别如图5、图6所示.
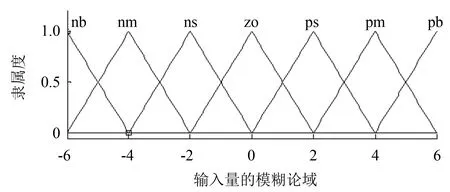
图5 Δγ和d(Δγ)/dt的隶属度函数 Fig.5 Membership function of Δγ and d(Δγ)/dt
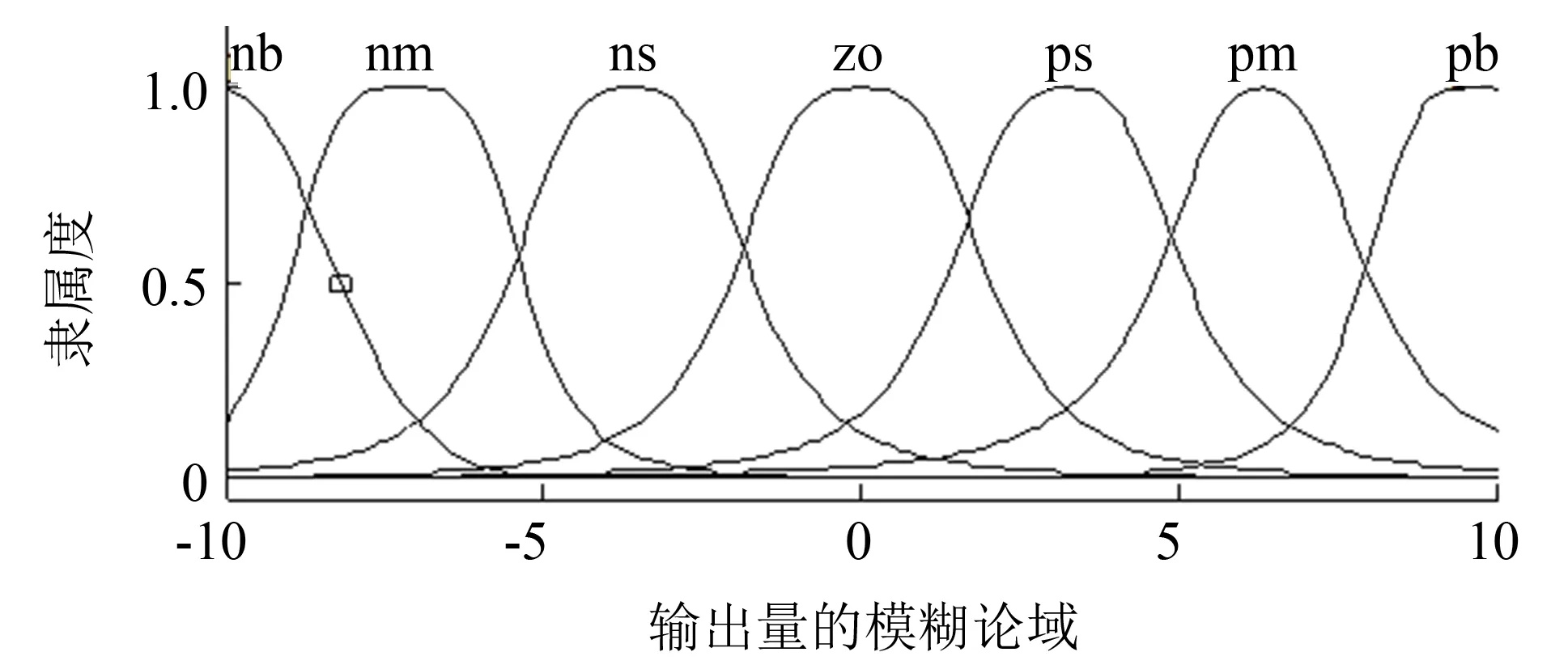
图6 Mz的隶属函数 Fig.6 Membership function of Mz
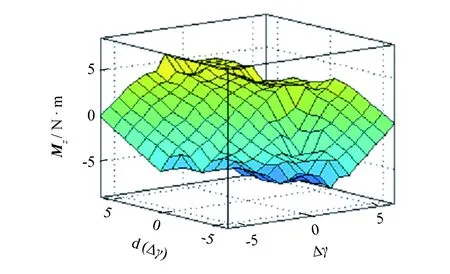
图7 Mz曲面图Fig.7 Surface chart of Mz
采用的模糊控制方法为‘Mamdani’法,用‘max-min’法作为推理机的推理方法,以面积重心法进行去模糊,则辅助横摆力矩Mz输出曲面关系如图7所示.
2.3 协调控制器设计
车辆行驶过程中受到的气动力与车辆和周围气流的相对速度的平方值成正比. 低速工况下,车辆受到的气动力/力矩较小,不足以达到主动干预车辆运动状态的目的,而在高速工况下车辆受到的气动力/力矩则较为可观. 因此,在低速工况下仅采用差动制动控制(简称‘差动控制’)的方法进行稳定性控制,在高速工况下则采用协调主动气动控制与差动制动控制(简称‘气液控制’)的方法进行车辆稳定性控制.
2.3.1 气液协调控制策略
考虑我国高速公路的限速规定,且低速工况下气动阻力较小不足以达到干预车辆的目的,因此将临界车速设为80 km·h-1. 高速工况下通过协调主动气动控制和差动制动控制产生车辆稳定性控制所需的辅助横摆力矩. 控制器实时根据车辆与周围气流的相对速度及车辆气动特性计算主动气动控制所能提供的最大气动力/力矩(Fa_max/Ma_max,翼板开度为90°时达到最大,可根据公式1和图2计算). 具体策略为: 在车速小于临界车速时,翼板均不开启,对油耗不产生影响; 当车辆稳定性控制所需辅助横摆力矩|Mz|小于|Ma_max|时,由主动气动控制产生该力矩; 当|Mz|大于|Ma_max|时,控制主动气动系统产生|Ma_max|,同时辅助横摆力矩的不足部分由差动制动控制进行补偿. 具体策略如图8所示。
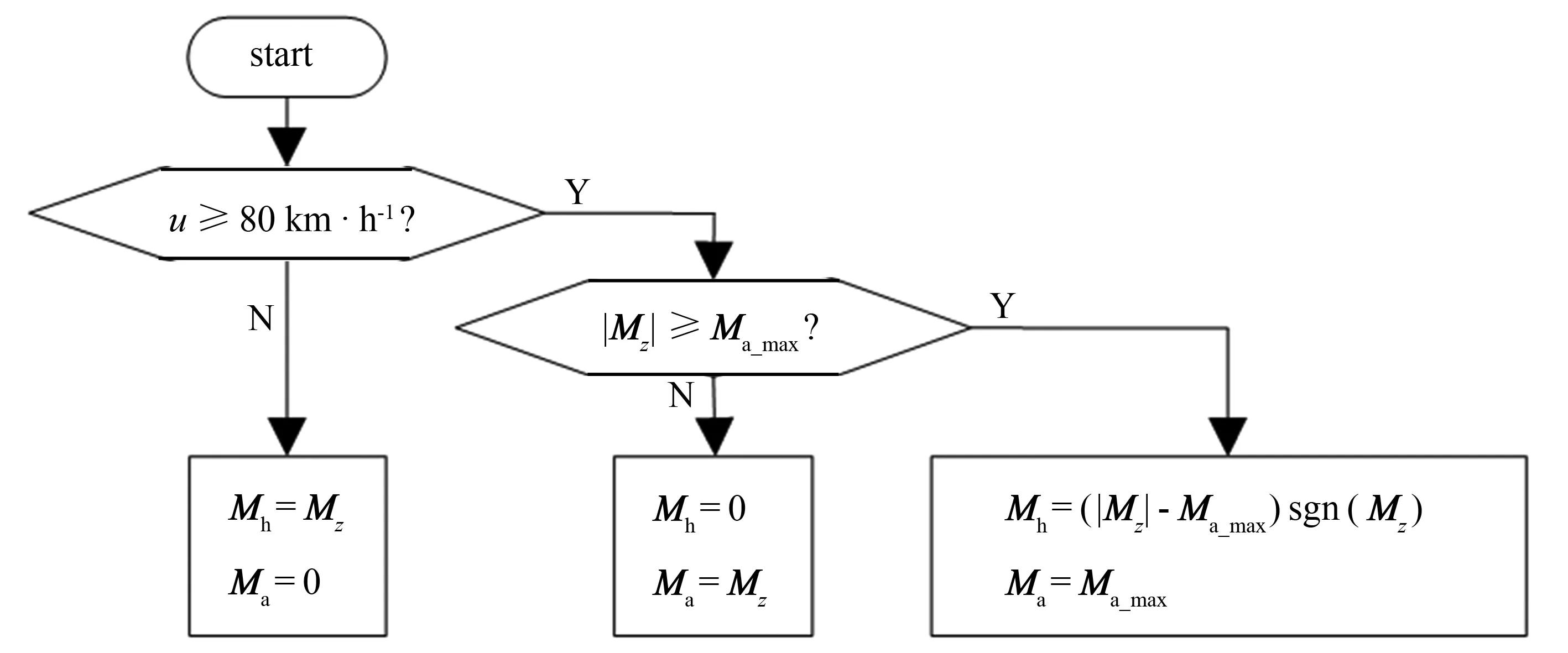
图8 气液协调控制策略Fig.8 Coordinated control strategy
2.3.2 主动气动控制
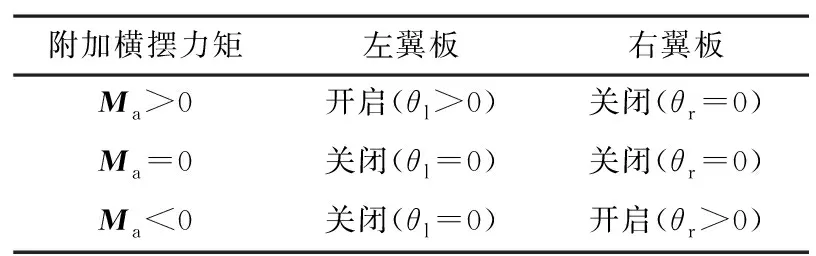
表1 翼板状态切换表
为产生期望附加横摆力矩Ma,仅需控制单个翼板的攻角,另一翼板攻角保持为零,目标翼板控制状态切换逻辑如表1所示.
产生Ma所需的附加气动阻力为:
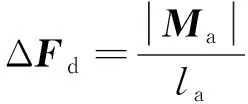
目标气动阻力为:Fd(θ)=Fd(0)+ΔFd,因此,可根据公式(1)和图2(a)计算目标翼板的攻角.
主动气动系统的攻角响应延迟可由一阶环节来表示该特征:
(7)
式中:τ为时间常数.
2.3.3 差动制动控制
产生附加横摆力矩Mh所需的附加差动纵向制动力Fxobj为:
Fxobj=2|Mh|·lw-1
(8)
式中:lw为轮距.
前后轮制动压力采用定比例分配方法,则目标侧前后轮的制动力有如下关系:
(9)
式中:Fxf、Fxr分别是目标侧前、后轮制动力.
则目标侧的车轮制动压力为:
(10)
式中:r为车轮半径;Kbf和Kbr是由制动摩擦面积、制动摩擦系数和制动器的半径三者共同确定的前、后车轮制动效能因数.
3 仿真结果与机理分析
3.1 数值仿真及结果分析
在Simulink建立车辆气动特性模型实时计算车辆受到的气动力/力矩,然后在Carsim的输入端口选定相应的气动力/力矩,从而搭建CarSim/Simulink联合仿真模型,根据ISO 3888-2: 2002的规范进行双移线试验,具体车辆结构参数如表2所示.

表2 车辆参数
采用轮胎利用率评估主动气动控制对轮胎工作状态的改善程度. 轮胎利用率λ为:
(11)
式中:Fxij、Fyij、Fzij分别为各轮受到的纵向力、侧向力、垂向力.
高附工况: 车辆以120 km·h-1的恒定速度在附着系数μ为0.85的高附着路面上进行双移线试验,具体仿真结果如图9所示, 轮胎各部位制动压力峰值如表3所示.
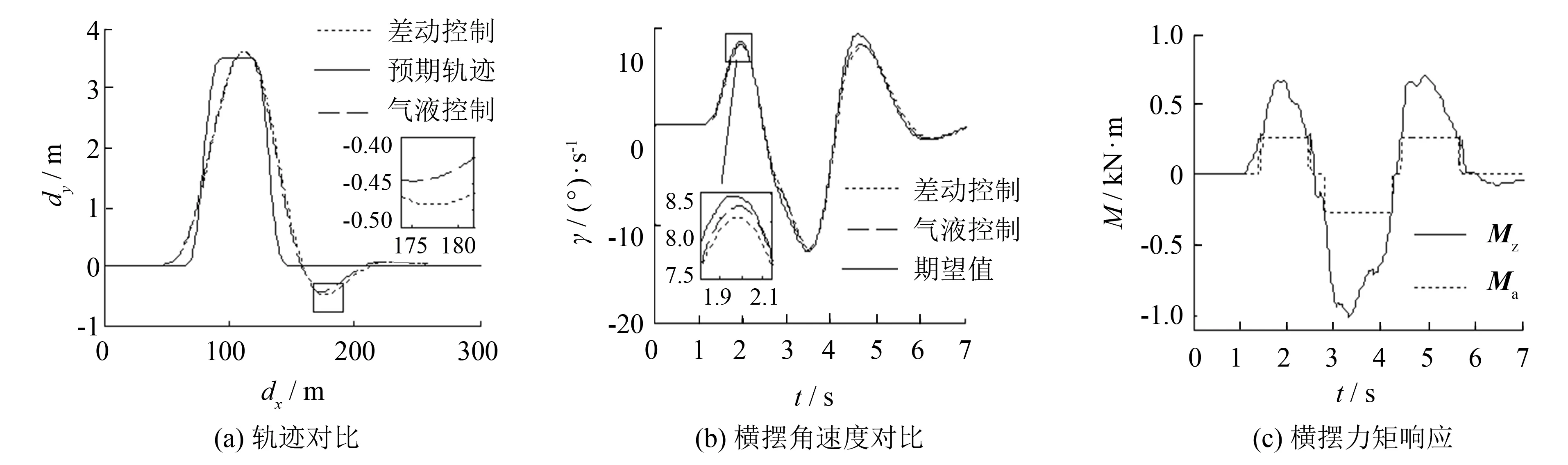
图9 高附着路面双移线结果Fig.9 Results of double lane change in high adhesion road
从图9(a)中可以看出,采用气液控制与差动控制均能使车辆有效地跟踪期望轨迹. 由图9(b)知,采用气液控制可更好地跟踪期望横摆角速度,其与期望值的平均偏差为4.4%; 而采用差动控制的平均偏差略大,为6.6%. 从图9(c)和表3可看出,因采用气液控制可产生附加气动力矩,从而减少差动控制所需产生的辅助横摆力矩,所以采用气液控制方式时制动压力平均峰值为比采用差动控制方式时小; 由表3可知,采用气液控制可减小24%的制动峰值压力,即可减轻制动器的工作负荷. 稳定性控制过程中轮胎利用率峰值如表3所示,可知采用气液控制时各轮轮胎利用率的最大峰值均比差动控制小,这表明采用气液协调控制可减轻轮胎工作负荷以提高车辆行驶的稳定性裕度.
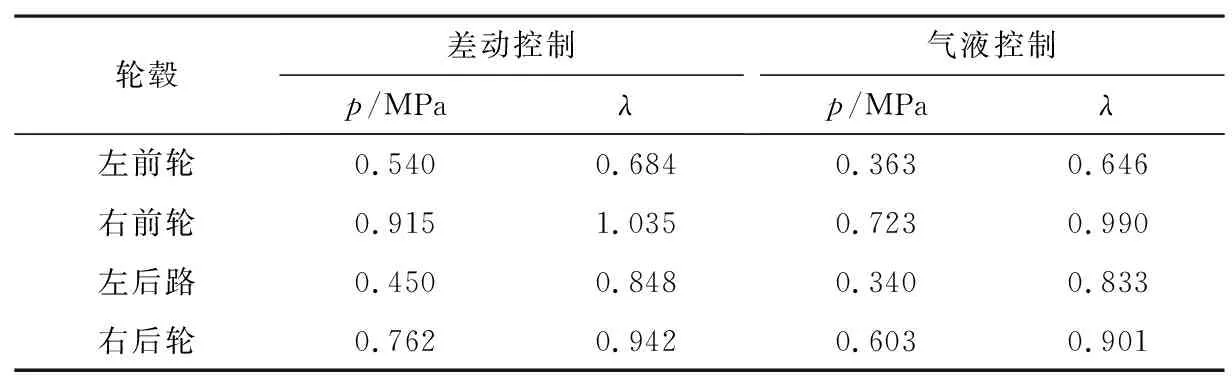
表3 μ=0.85时制动压力峰值与轮胎利用率峰值对比
低附工况: 车辆以120 km·h-1的恒定速度在附着系数μ为0.4的低附着路面上进行双移线试验,具体结果如图10所示, 轮胎各部位制动压力峰值如表4所示.
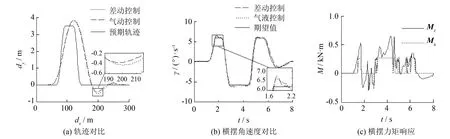
图10 低附着路面双移线仿真结果Fig.10 Results of double lane change in low adhesion road
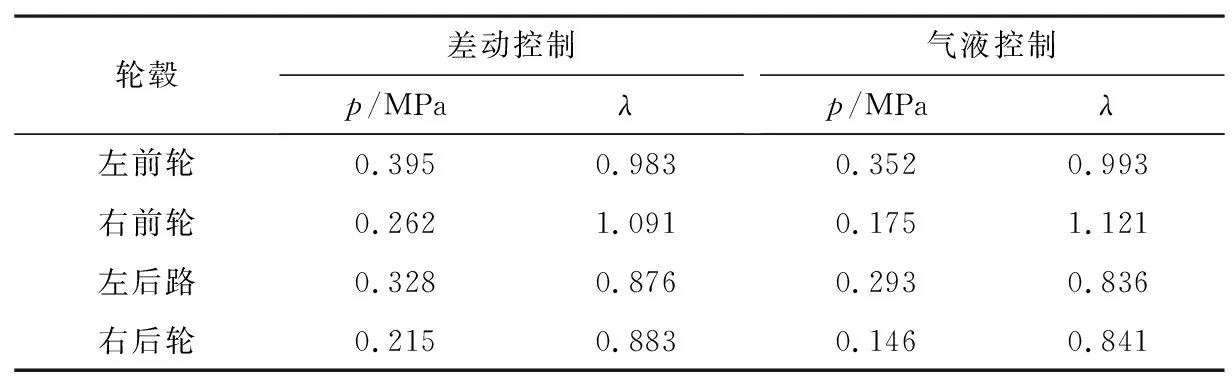
轮毂差动控制p/MPaλ气液控制p/MPaλ左前轮0.3950.9830.3520.993右前轮0.2621.0910.1751.121左后路0.3280.8760.2930.836右后轮0.2150.8830.1460.841
如图10(a)所示,采用气液控制时车辆能更好地跟踪期望轨迹. 如图10(b)所示,受路面附着情况约束,期望横摆角速度将出现三个平台区间,采用气液控制和差动控制均能使车辆有效地跟踪期望值,但采用气液控制时车辆的横摆角速度超调量更小. 由表4可知,采用气液控制可显著减小各轮制动压力,即可减轻各轮制动强度. 目标车辆为前轮驱动车辆,翼板开启过程中车辆受到的气动阻力增大,为保持车速需输出更大的驱动力矩,因此采用气液控制时前轮轮胎利用率略大; 后轮为非驱动轮,采用气液控制时后轮轮胎利用率略小.
3.2 机理分析
采用主动气动控制与液压差动制动协调控制方式时,一方面可减轻纵向制动力,即减轻制动强度; 另一方面,由图2(b)和公式(1)可知,翼板开启时车辆受到的负升力将变大,即向下气动力将增大,可增加轮胎的垂向载荷,从而扩大摩擦圆/椭圆增强摩擦极限,因此,车辆具有更大的稳定性裕度.
4 结语
提出一种协调主动气动控制与差动制动控制的车辆稳定性控制方法,并对此做了理论和仿真研究.
1) 分析主动气动系统对车辆气动特性的影响.
2) 依据分层控制思想,设计了车辆稳定性控制系统.
3) 运用Carsim/Simulink进行联合仿真分析,验证了所提出的基于主动气动控制的稳定性控制方法相比于传统的基于差动制动的稳定性控制方法的有效性和优越性,为提高车辆稳定性提供了一条新的技术途径.
