基于ADAMS与SIMULINK的Stewart主动振动控制平台联合仿真
2018-10-23于开平
焦 健,吴 迎,于开平
(哈尔滨工业大学 航天学院,哈尔滨 150001)
高分辨率对地观测卫星在诸多民用及军事领域发挥着重要作用,对国家安全具有重大的战略意义,也是我国卫星工程发展的重要方向,而制约有效载荷分辨率提高的重要因素之一就是卫星振动[1]。因此,为获得高分辨率所需的极端安静的环境,必须对振动进行控制[2]。
针对振动控制提出的各种方案中,Stewart并联平台[3],作为目前最典型、应用最广并且隔振效果相对最好的并联隔振机构,具有能够实现多自由度隔振,且承载能力高、刚度大、在无外界能源输入时可以保持稳定以及对操作的误差不敏感等显著优势,目前已经成为一种常用的平台设计方案[4–11]。但由于其动力学模型复杂且运动学正解较难得到,使其理论结果难以在实际工程中广泛应用。
随着虚拟样机技术的飞速发展,联合仿真成为了目前机电一体化研究中的热门方法之一。同传统的机械设计方法相比,其优势在于不必消耗大量的人力物力财力[12],可以大大减少研发成本[13],缩短设计周期,提高设计质量,尤其是对于复杂的机电控制系统而言其优势更加明显。
本文提出一种Stewart并联平台构型,并对其进行了动力学模型的建立,推导出了其最终的动力学方程的矩阵表达式。在此基础上通过ADAMS机械动力学分析软件对其进行虚拟样机模型的建立,然后将建立的输入与输出变化量导入到MATLAB/Simulink中,并在Simulink中建立了控制系统模型,最终实现Stewart并联平台的振动控制联合仿真。结果表明所建动力学模型准确,并且Stewart并联平台具有良好的隔振性能。研究成果对于Stewart并联平台的结构设计以及实际的物理样机的制造具有理论指导意义,并为调试合理的控制算法提供了便利的方法。
1 Stewart平台动力学方程
Stewart平台几何构型是由基础平台、载荷和6个连接基础平台和载荷的可伸缩的支腿组成,如图1所示。
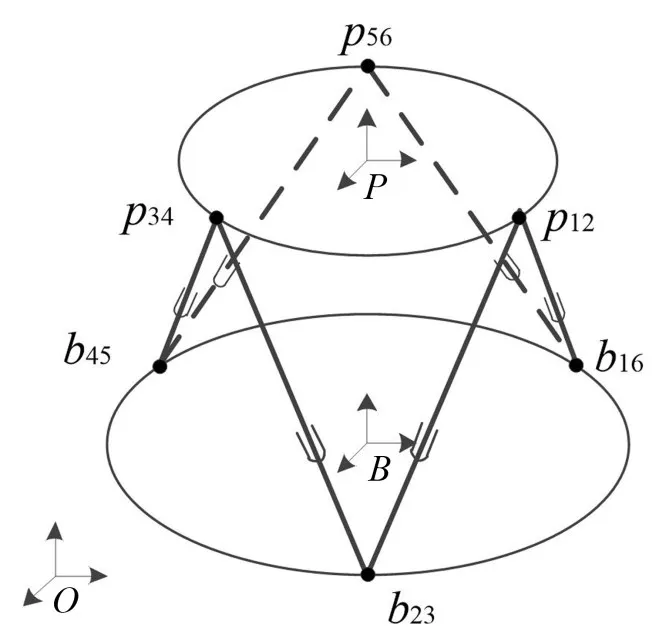
图1 平台的模型
本文假设所有物体均是刚性的,并且所有支腿没有差异性。为了描述Stewart平台的运动学特性,在此引入6组坐标系。分别是惯性坐标系O;局部坐标系P和B以及支腿上3个局部坐标系。其中,P和B的原点分别位于载荷和基础平台的几何中心,坐标系O、P和B的坐标轴相互平行。因此,P和B到O的变换矩阵为

支腿的计算示意图如图2所示。每条支腿是由上半部分si、下半部分ci和电磁作动器组成。
支腿向量的表达式为

支腿长度可表示为

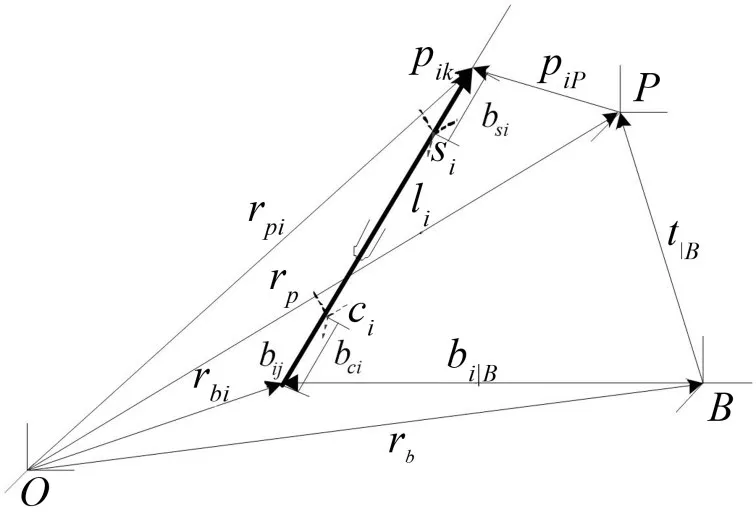
图2 支腿的计算示意图
因此支腿的单位向量表示为

通过对支腿的运动学分析可以得到上半部分si和下半部分ci质心处的速度和加速度表达式为

再求出其偏速度和偏角速度,即可通过Kane方程[14]来建立系统的动力学方程,最终的矩阵表达式为[15]

2 ADAMS虚拟样机模型
Stewart并联平台的虚拟样机模型包括1个基础平台,6条上半支腿,6条下半支腿和1个载荷圆板;连接铰链包括6个移动副和12个球铰副。图3是根据Stewart并联平台几何尺寸参数在ADAMS中建立的虚拟样机模型。
ADAMS与MATLAB/Simulink之间的数据交换是通过状态变量来实现的,而非设计变量。在计算过程中,状态变量是一个数组,包含一系列数值。而设计变量不能保存变值,只是一个常值。在定义输入量和输出量之前,需要先定义相应的状态变量。
用于输入和输出的状态变量一般是系统模型元素的函数,其中输入变量是系统被控制的量,而输出变量是系统输入到Simulink中的变量,它的值经过预先设计好的控制方案后,返回到输入变量,从而实现数据的交换从而达到联合仿真的效果[16]。针对本文中的Stewart并联平台机构,以6条上支腿质心处的加速度响应作为输出变量,以施加在6个支腿移动副上的驱动力(模拟电磁作动器的出力)作为输入变量。然后通过ADAMS/Control接口与MATLAB/Simulink进行连接,如图4所示。
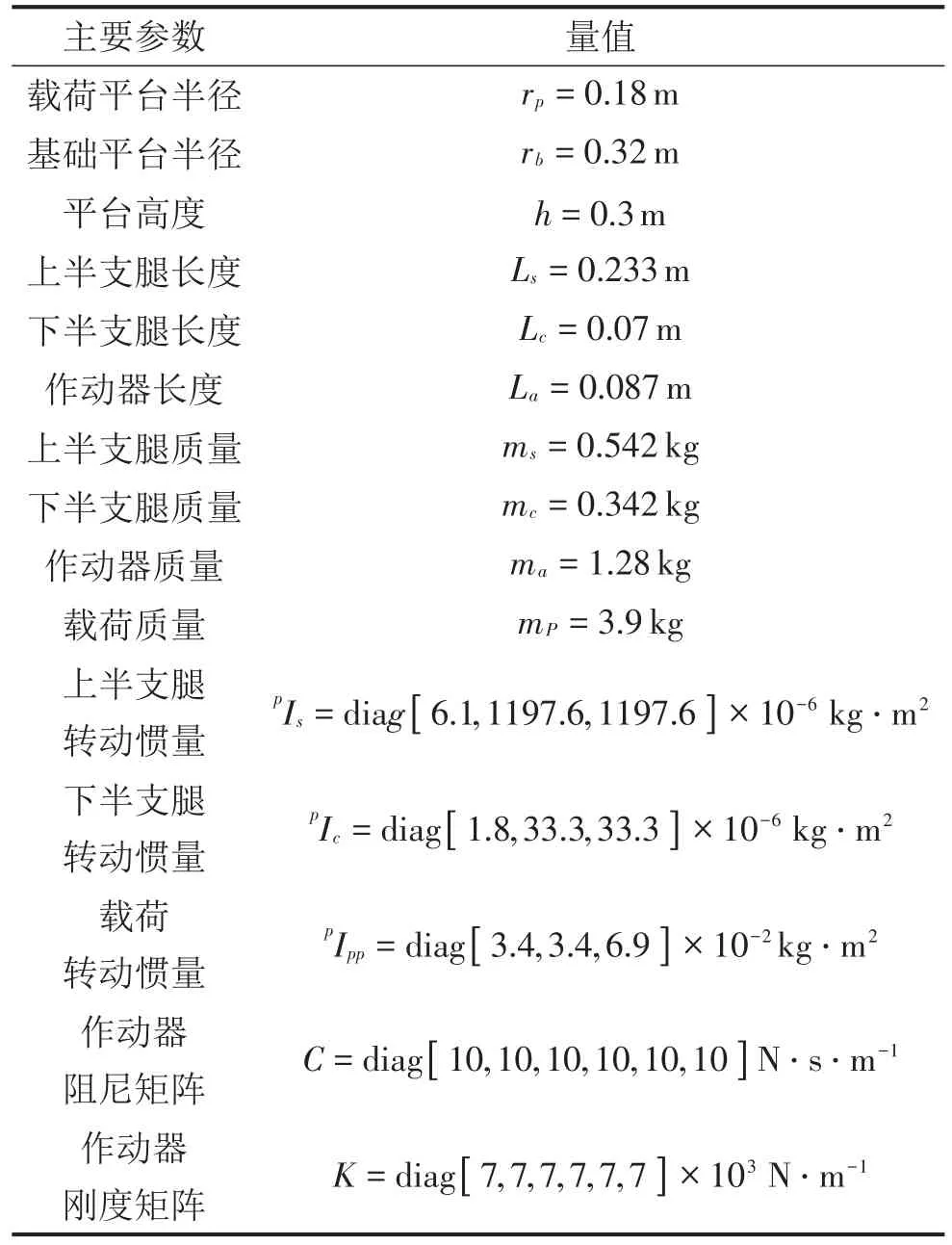
表1 动力学模型的参数
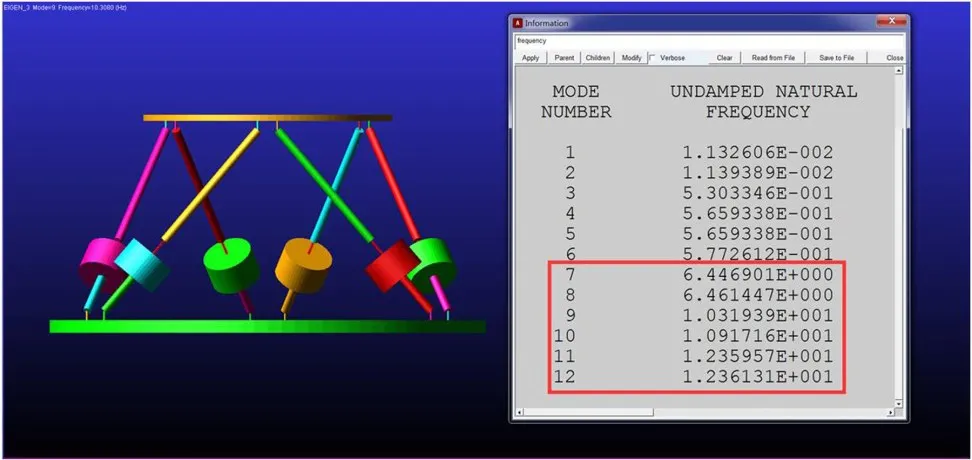
图3 Stewart平台虚拟样机
在MATLAB/Simulink中生成模块文件,如图5所示。
3 模型验证
为了验证动力学的准确性,把在ADAMS中建立的虚拟样机模型和试验样机模型分别进行了模态计算,并对比分析两者的计算结果。
ADAMS计算得到的模态分析结果如图3所示;另外根据模型参数建立了Stewart平台的实物样机,如图6所示。
并进行了模态试验。将两者的计算结果进行整理得到表2。
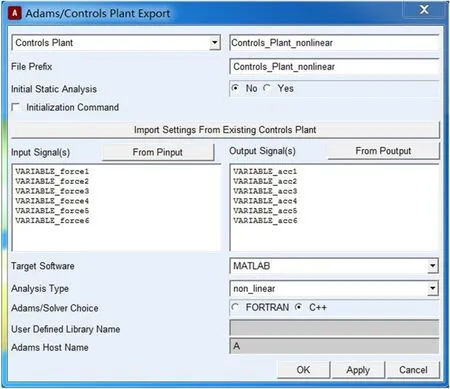
图4 ADAMS/Control接口
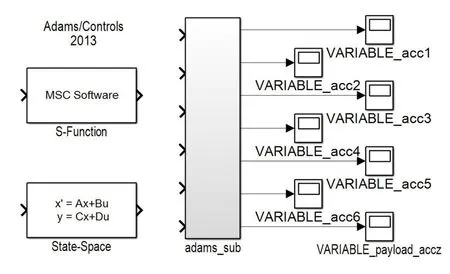
图5 ADAMS_sub模块
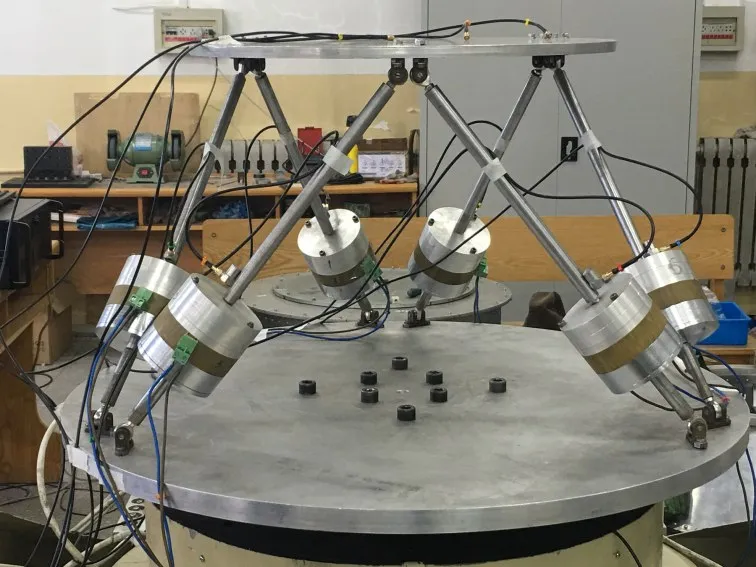
图6 平台样机实物图
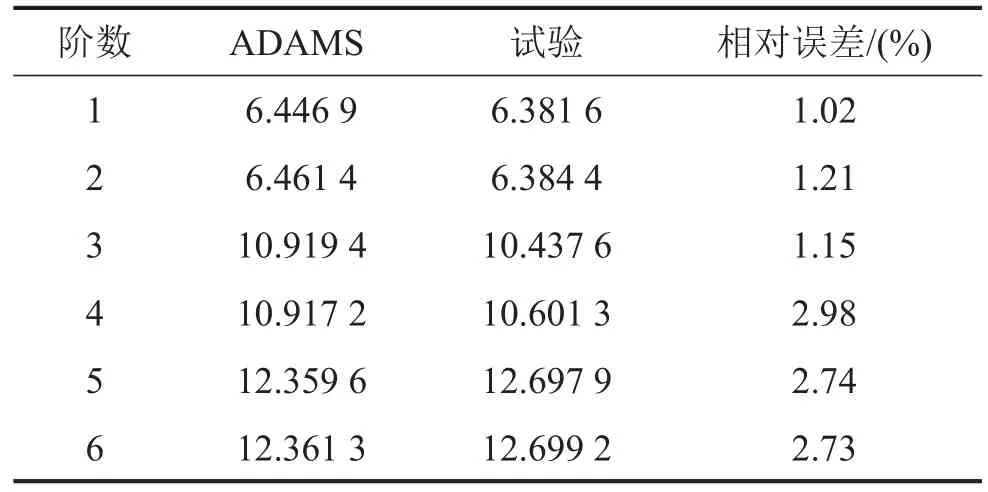
表2 固有频率对比/Hz
从表中可以看出两者的计算结果基本一致,误差很小,因此可以证明所建立的仿真模型是正确的。
4 控制系统
本文采用经典的PID控制方法对Stewart平台进行联合仿真验证,通过计算载荷的减振效果来分析控制算法对于平台模型的有效性。
PID控制器,由比例单元P、积分单元I和微分单元D组成。通过Kp,Ki和Kd三个参数设定。PID控制器主要适用于基本线性和动态特性不随时间变化的系统。由于其具有结构简单、稳定性好、工作可靠、调整方便的优点,已成为工程实际中应用最广泛的控制规律[17].Stewart并联平台中PID控制系统Simulink模型的原理如图7所示。
5 Stewart并联平台联合仿真及试验
这部分将对Stewart并联平台进行动力学的仿真分析,模型即为之前建立的动力学模型,在基础平台的质心处施加一个加速度幅值恒为1 m/s2、频率带为5 Hz~30 Hz的正弦扫频信号,方向沿平台的高度方向,即垂直于基础平台和载荷的方向,定义为Z方向,并采用对数扫频的方式。仿真计算载荷质心处Z方向的加速度响应,因为其他两个方向X、Y方向不与Z方向耦合[18],因此加速度响应几乎为零。
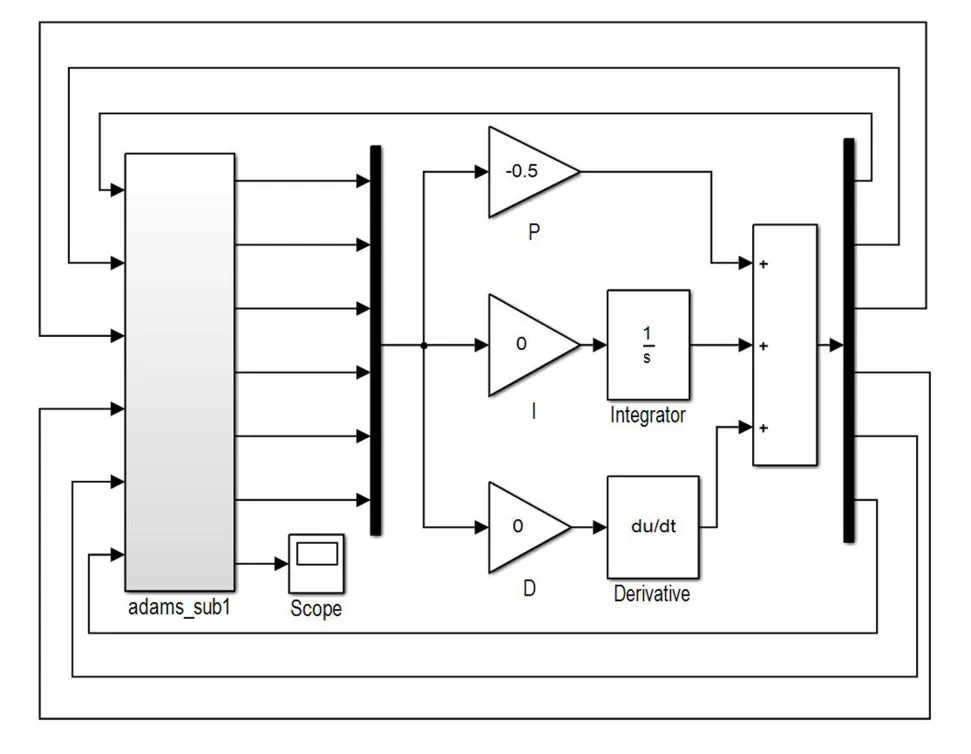
图7 PID控制系统的Simulink流程图
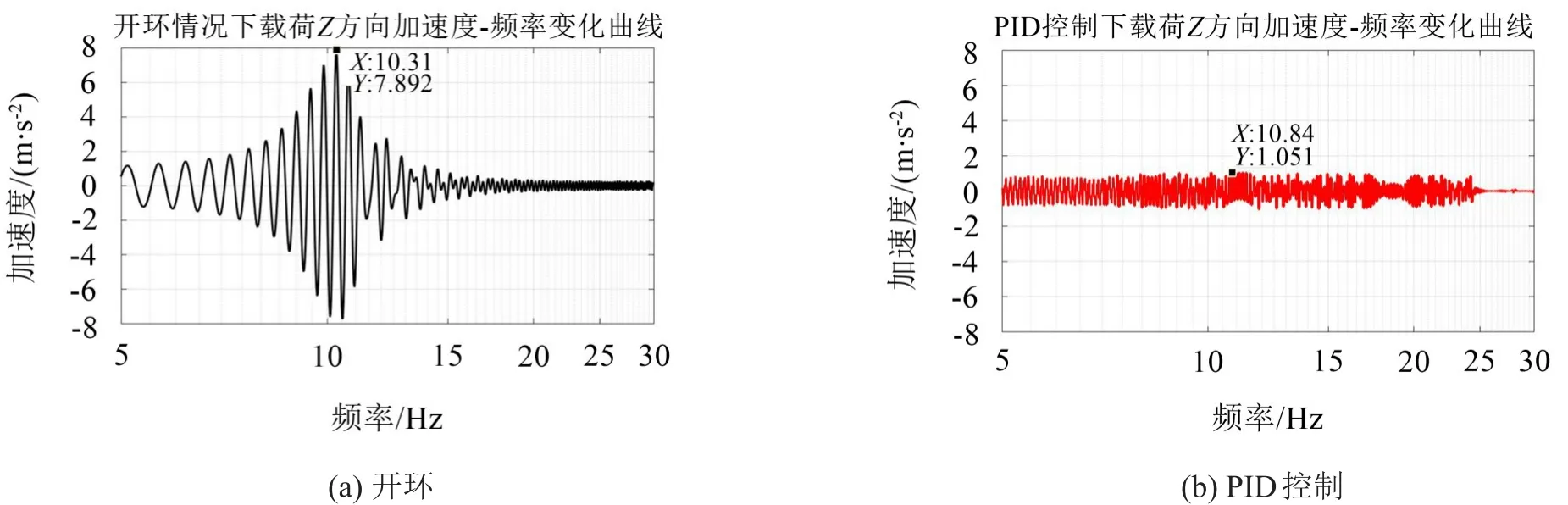
图8 载荷加速度时域响应
分别进行了2组仿真计算,分别是开环无控和PID控制的情况下,时域仿真结果如图8所示,频域仿真结果如图9所示。
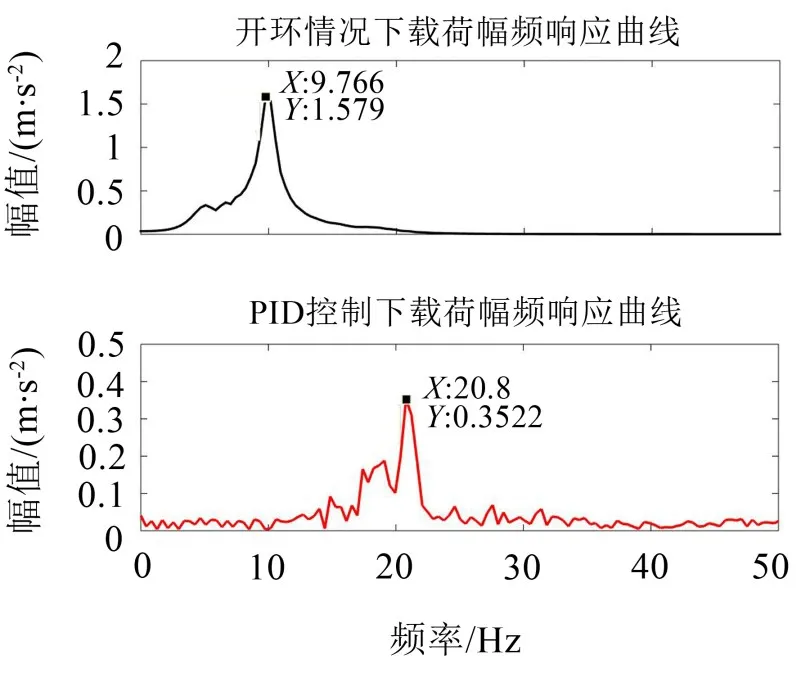
图9 载荷加速度频域响应
由时域仿真曲线可以看出,控制算法能显著地降低载荷质心处的Z方向加速度响应,从开环时的7.892 m/s2降低到1 m/s2左右,降幅大约为18 dB。从频域响应曲线上可以得知,开环情况下响应信号主要集中在10 Hz左右的频带内,这和之前得到的系统固有频率是吻合的。在PID控制情况下,响应幅值在10 Hz频带内较开环时有大幅度的降低,在20 Hz处稍有增加,这是引入控制系统导致的。仿真结果证明了针对本文提出的Stewart平台所设计的PID控制算法的有效性。
此外还进行了试验的验证,图10所示即是控制前后载荷加速度响应的试验结果曲线。
从试验结果可以看出,在开环情况下响应峰值为8.141 m/s2,在PID控制后响应峰值降为3.282 m/s2,降幅达7.9 dB,减振效果明显,说明Stewart主动控制并联平台对于振动抑制的有效性。
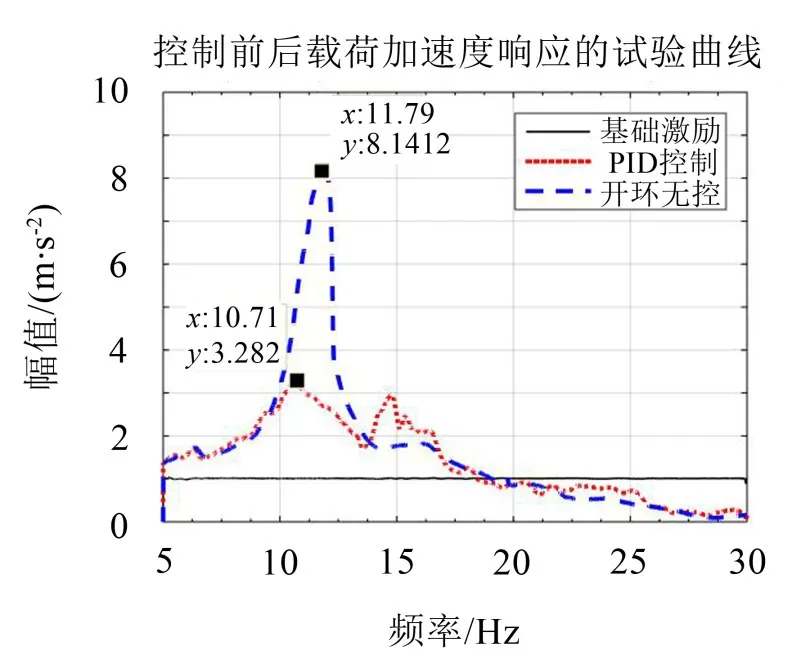
图10 试验结果
6 结语
本文利用ADAMS软件建立了Stewart并联平台的虚拟样机模型,并通过试验验证了模型的准确性。之后在MATLAB/Simulink环境下建立了控制系统模型,最终通过二者的接口实现了交互式联合仿真。仿真结果表明,Stewart并联平台对于振动的抑制作用效果明显。
通过这种联合仿真的方法,可以方便地对系统进行参数优化以及性能的预测,不仅减少研发成本,缩短设计周期,提高设计质量,而且对于Stewart并联平台的结构设计以及实际的物理样机的制造具有理论指导意义,并为调试合理的控制算法提供了便利的方法。
