舰船瞬态噪声激励源传递路径识别方法研究
2018-10-23余桐奎时胜国刘文帅
余桐奎,时胜国,刘文帅,谌 勇
(1.哈尔滨工程大学,哈尔滨 115000; 2.大连测控技术研究所,辽宁 大连 116013;3.上海交通大学 振动冲击噪声研究所,上海 200240)
从作战效能角度出发,舰船的声隐身性能至关重要,良好的声隐身性能可以大大提高舰船的生存能力和威慑效果[1]。随着对舰船振动噪声特性认识的深入以及各种减振降噪措施的应用和落实,我国舰船减振降噪基础研究与型号研制的工作成效逐步显现,使得舰船稳定航态下噪声的控制取得了长足的进展,但是,伴随研究的不断深入,发现另一类噪声却悄然凸现,这就是在舰船状态突然变化,如转向时的舵角改变、管道多相流体的脉动声辐射、武器发射前后的一系列动作等产生的噪声[2]。这些噪声一般具有瞬时能量强、持续时间短、出现频繁等特点,对声纳而言,这些特征不仅影响自身工作性能,且易于为敌方声纳所探测[3]。因此,这些瞬态噪声已构成了不断降低的舰船噪声情况下的新的隐患。
由于舰船是一个十分复杂的系统,设备众多,能产生瞬态噪声的激励源也多,噪声主要通过弹性安装、基座等支撑结构和管路、电缆等非支撑结构传递至船体上,但是,传递通道错综复杂,加之机械声源的干扰,致使舰船瞬态噪声激励源传递路径识别难度巨大,机械噪声源振动主要传递路径识别的难度增大。因此,采用不同信息处理方法综合分析振动噪声源的主要传递路径是很有必要的,但是各方法间的综合集成思路是难点。本文基于短时相关法,结合经验模态分解、主分量分析和线谱剔除方法,建立了基于信息相似性的瞬态噪声激励源传递路径识别方法,并通过理论仿真和验证试验验证了该方法的有效性和工程实用性。
1 理论分析
1.1 经验模态分解方法
经验模态分解方法是一种适用于非线性、非平稳随机过程的信号分析方法[4],其能够将振动信号分解为有限个数的固有模态分量(IMF)和一个残余量。每个IMF必须满足两个条件:
① 在整个数据序列中,极值点的数量与过零点的数量必须相等或者至多相差一个;
② 在任何一点,由数据序列的局部极大值点确定的上包络线和由局部极小值点确定的下包络线的均值为零,即信号关于时间轴局部对称[5]。
对任意信号x(t)经过经验模态分解后可以表示为

上式中:ci(t)为信号x(t)的IMF分量,i=1,2,…,n,包含了从高到低不同频率段的信号成分;rn(t)为x(t)的趋势项[6–7]。
由此可见EMD分解在本质上是一个筛选过程,分解得到的IMF由于所包含信号的频率成分相对单一,此更利于突出原始信号的局部特征。
1.2 主分量分解方法
假设x(t)为舰船瞬态噪声测试试验中振动测量信号,对其进行经验模态分解,可得m个不同尺度的IMF分量C(t)[8]。

求解C(t)的协方差矩阵的特征根(详细推导过程请参见邰淑彩等著《应用数理统计》),记为
λi对应正交特征分量,记为ξi,得到第i个主分量

上式中特征值λm+1,…,λn是相关矩阵的特征值中最小的(n-m)个特征值,在用于重构逼近向量所遗弃的项。这些特征值越接近与近于零,降维后所保存原始数据中的信息量就越有效。
依据主分量选取原则,考虑前若干个λi使其和占的较大,而略去较小的λi,重构原始数据向量,可得用于表征实测信号中主要特征信号成分[9–10]。

从目前实测数据的分析结果来看,一般选取前m个主成分的累计方差贡献率超过90%,从而避免瞬态信号被“遗弃”,当然这并不是一个绝对不变的标准,可以根据实际效果作取舍[11]。
1.3 短时相关法
在(4)式的基础上,选择具有瞬态噪声特性的信号成分,进行线性叠加,可得重构信号z(t),用以表征输入信号x(t)的瞬态特征。
假设舰船噪声输出信号为y(t),通过计算y(t)与z(t)的相关系数ρ(|ρ|≤1)来描述输入与输出信号之间的关联程度。

上式中:cov[X,Z]=E[(z-μz)(y-μy)]
为了获得瞬态信号之间的相关系数,在分析信号乘以一个有限时间段的窗函数h(t),并且通过在时间轴上进行滑动,从而得到瞬时信号间的短时相关系数ψ(t)[12]。

1.4 线谱剔除技术
舰船瞬态噪声实测数据主要由瞬态噪声、稳态噪声和环境噪声构成,实测数据分析表明,稳态噪声和环境噪声对于瞬态噪声有效分析时段的截取、声学特征和激励源分析等方面均存在一定的影响,因此,在实测数据处理前,适当地剔除强线谱噪声是十分必要的,本文基于傅里叶变换互逆原理,将特征线谱提取出来,然后在原始信号中扣除。
假设舰船瞬态噪声实测数据为y(t),主要由稳态噪声x(t)、瞬态噪声s(t)和环境噪声n(t)的线型叠加构成。

对于稳态信号x(t)可以看作周期信号的线性组合,对其进行傅里叶变换得到的X(ejω)被称为x(t)的频谱。
利用傅立叶变换可逆性原理,对信号进行傅立叶变换,提取特征频谱,再进行傅里叶反变换,可得对应特征信号,与原始信号相减,从而达到剔除线谱的目的。
图1给出线谱剔除方法的仿真结果,仿真信号由20 Hz和120 Hz线谱叠加高斯白噪声构成,由图可见,该方法可以较好地剔除特征线谱,而且不影响其它信号的频谱结构,这为瞬态噪声数据分析中剔除线谱干扰奠定了理论基础。
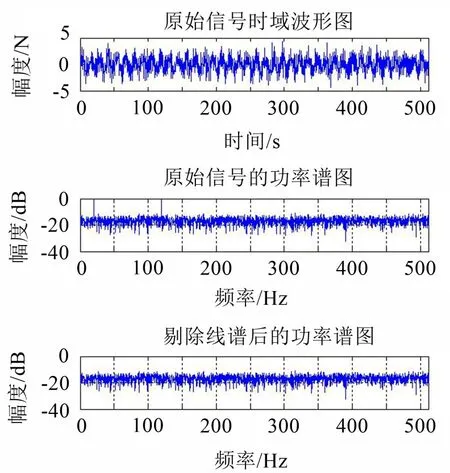
图1 线谱剔除前后的时域和频域波形图
在上述理论研究的基础上,综合运用各算法的优势,形成舰船瞬态噪声激励源传递路径识别方法,具体分析流程如图2所示。
(1)对舰船瞬态噪声测试数据各振动信号进行功率谱分析,剔除强线谱,然后进行经验模态分解,得到各信号不同尺度的IMF分量;
(2)对每路振动信号的IMF分量进行主分量分析,选取对原信号贡献较大的IMF分量,“遗弃”贡献较小的IMF分量,对选取的IMF分量进行时频分析,挑选瞬态特征分量进行累加重构,得到各路振动信号所对应的瞬态信号;
(3)计算瞬态信号与输出信号间的相关函数,经对比分析,可得各振动信号与输出信号间的关联关系,从而确定输出信号中瞬态噪声的来源及传递情况。

图2 瞬态噪声激励源传递路径识别方法流程图
2 仿真研究
通过构建信号已知,传递关系清晰的理论模型,利用本文建立的瞬态噪声激励源识别方法进行分析,将分析结果与仿真条件相比对,从而验证算法的准确性和可行性。
仿真算例:构建多输入单输出模型如图3所示。

瞬时激励源δ(t)经通道h1(t)、h2(t)、h3(t)和h4(t)传递后的响应信号分别为x1(t)、x2(t)、x3(t)和x4(t),分别叠加180 Hz、150 Hz、200 Hz和300 Hz正弦信号,引入随机高斯白噪声,各信号数学表达式如下
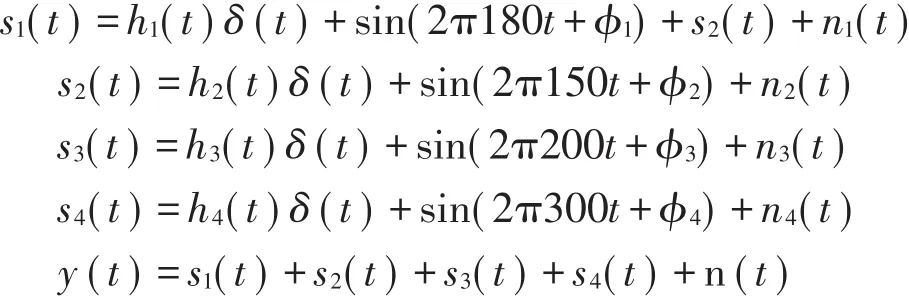
式中:n1(t)、n2(t)、n3(t)、n4(t)和n(t)均为随机高斯白噪声,由图3可见,红色虚线表示激励源δ(t)能量传递的主要途径,主要模拟舰船内部激励源振动能量经支撑传递至船体,再经船体向水下辐射噪声y(t)的振动—声的传递过程。
各信号时域波形如图4所示,由图可见,瞬时信号的中心时刻在1 s,持续时段约为0.2 s。
对输出信号进行经验模态分解,如图5所示,由图可见,IMF2瞬时特征突出,而IMF3和IMF4存在较强干扰,使得瞬态成分体现较弱。
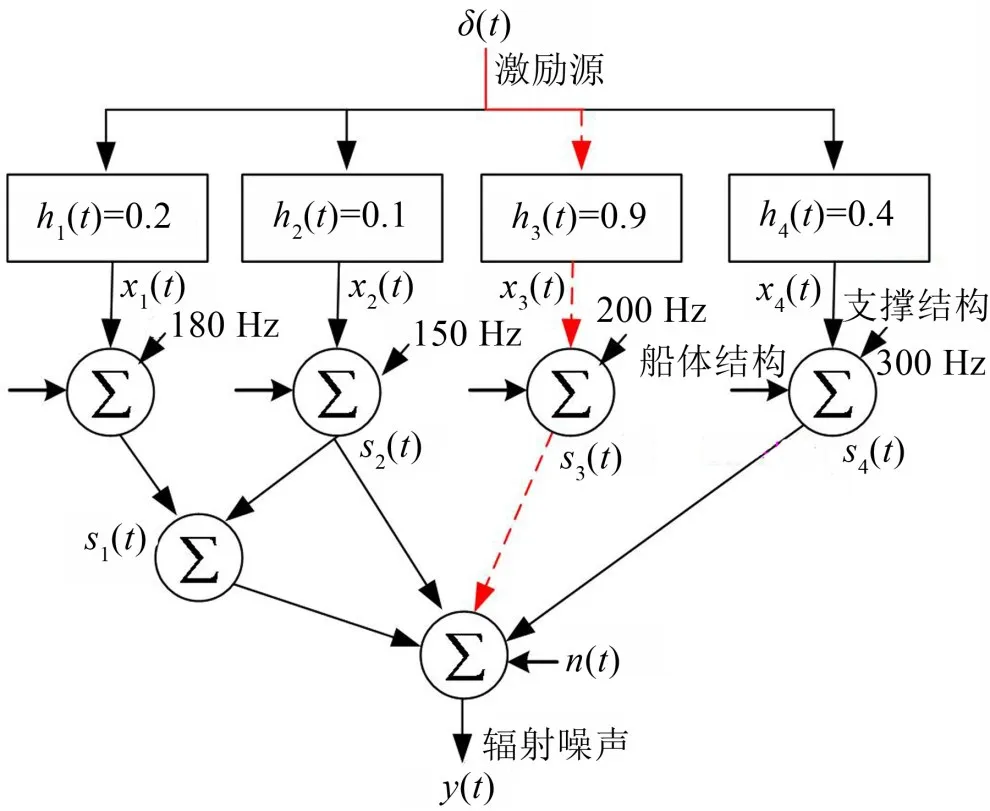
图3 瞬态信号传递路径数学模型
下面通过主分量分析可得各主要IMF分量的贡献,可得
为确定各主要IMF分量与输出信号之间的关联关系,进一步利用短时相关法分析前4个IMF分量与输出信号之间的关联关系,如图6所示。
由图可见,各分量与输出信号之间的相关系数值均在0.5以下,IMF3的相关系数值相对最大,IMF2次之,IMF1与输出信号之间的相关系数在整个时间段内的数值趋于恒定值,说明IMF1分量主要为稳态信号,也表明了稳态信号对于分析瞬态信号与输出信号之间的关联关系存在一定影响,因此,下面利用线谱剔除技术将输出信号中的强线谱剔除以后,再进行短时相关分析。
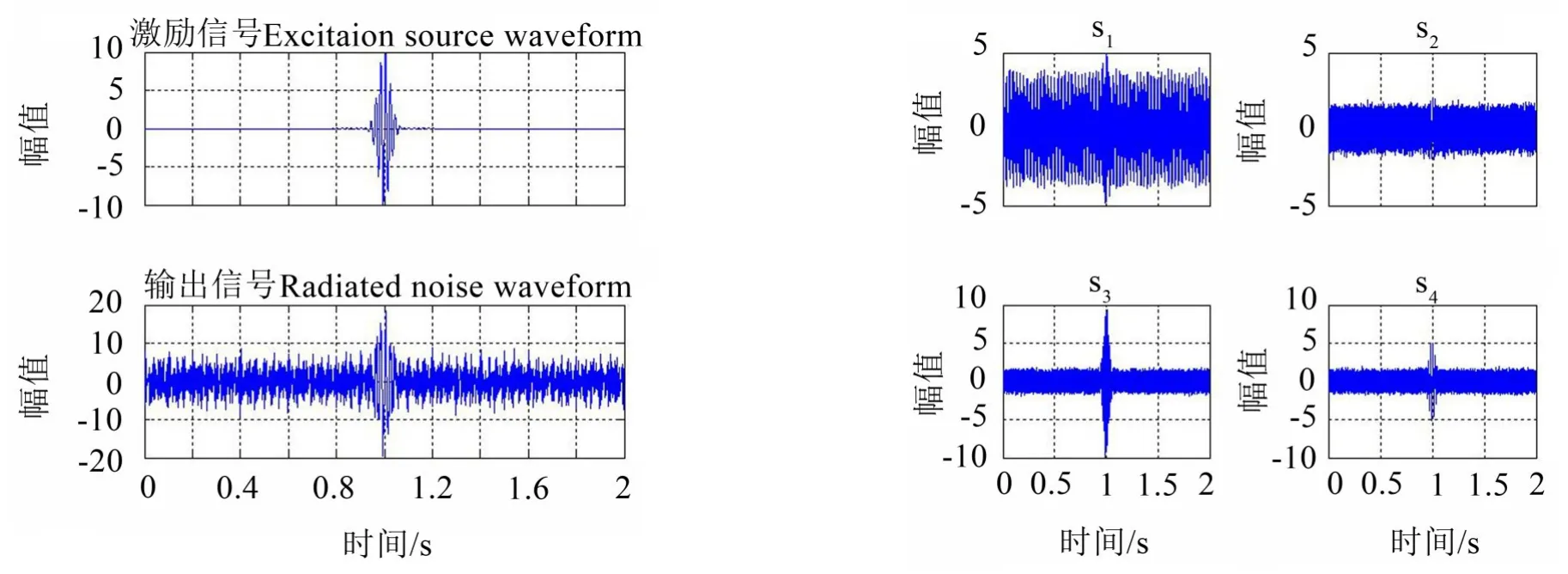
图4 仿真信号时域波形图

图5 输出信号的各IMF分量
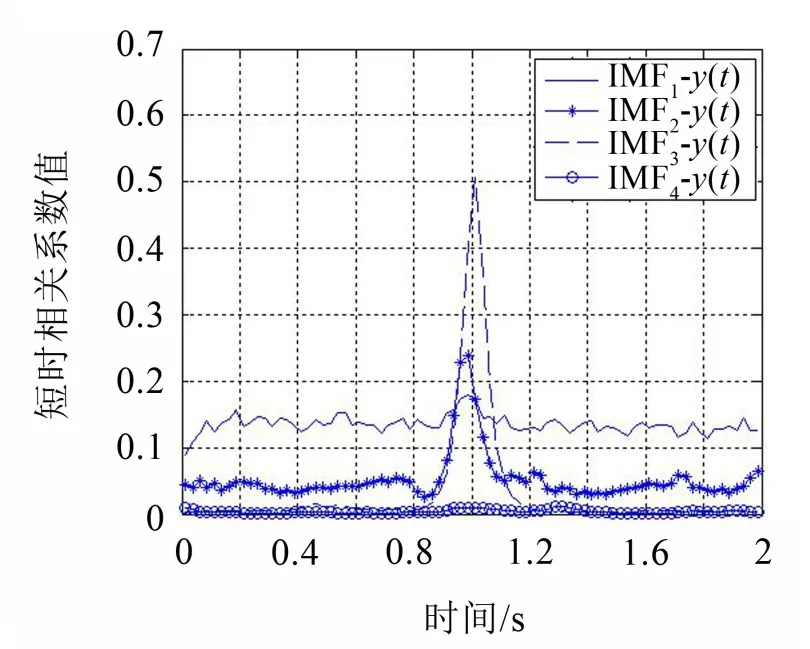
图6 输出信号与主要IMF分量的短时相关函数图
图7给出了剔除强线谱前后的输出信号时域和频域波形对比图,由图可见,在原始信号的功率谱图中存在150 Hz、180 Hz、200 Hz和300 Hz特征线谱,利用本文建立的线谱剔除方法,可以很好地将信号中线谱成分剔除,而且不改变其它信号频谱结构。
对提出线谱后的输出信号y(t)进行经验模态分解,各IMF分量如图8所示。
对各IMF分量进行主分量分析,可得,前3个主分量的贡献率达95.7%。下面主要对这3个IMF分量分别进行短时相关分析,如图9所示,由图可见,IMF2分量与输出信号的相关系数值最大,IMF3次要反映输出信号中瞬态成分的信号cy(t)。
同理,分别对各输入信号s1(t)、s2(t)、s3(t)和s4(t)进行分析,可得反映各输入信号中瞬态成分的重构信号c1(t)、c2(t)、c3(t)和c4(t),然后,分析其与cy(t)之间的关联关系,给出短时相关函数图,如图10所示,通过对比各函数值大小,可知,s3(t)与y(t)的相关系数值最大,s4(t)次之,说明辐射噪声中瞬态信号成分主要来源于船体响应s3(t)。
下面通过分析s3(t)与各输入信号x1(t)、x2(t)、x3(t)和x4(t)之间的关联关系,判断s3(t)中瞬态信号成分主要来源情况,分析结果如图11所示,由图可见,x3(t)与s3(t)的相关系数值最大,x4(t)次之,说明船体响应s3(t)中瞬态成分信号主要来源之,具有明显瞬态特征,因此,通过信息累加重构主于x3(t)。
综上所述,辐射噪声y(t)主要中存在瞬态信号,中心时刻在1s,持续时段约为0.2s,振动能量主要经“支撑”h3(t)传递至“船体”产生响应s3(t),再形成辐射噪声y(t),分析结果与仿真信息完全一致,说明了本文建立瞬态噪声激励源传递路径识别方法的可行性和准确性,为了验证本方法的工程实用性下面进一步开展实船验证试验。
3 试验研究
以某试验船泵舱底部壳体作为试验平台,加装数量已知、传递路径清晰的设备,模拟舰船机械声源振动至声传递通道,利用力锤激励设备,同步获取激励源振动与水介质中声辐射信息,分析激励源主要传递通道,并与已知信息进行比对,验证本文建立的瞬态噪声激励源传递路径识别方法的有效性和适用性。
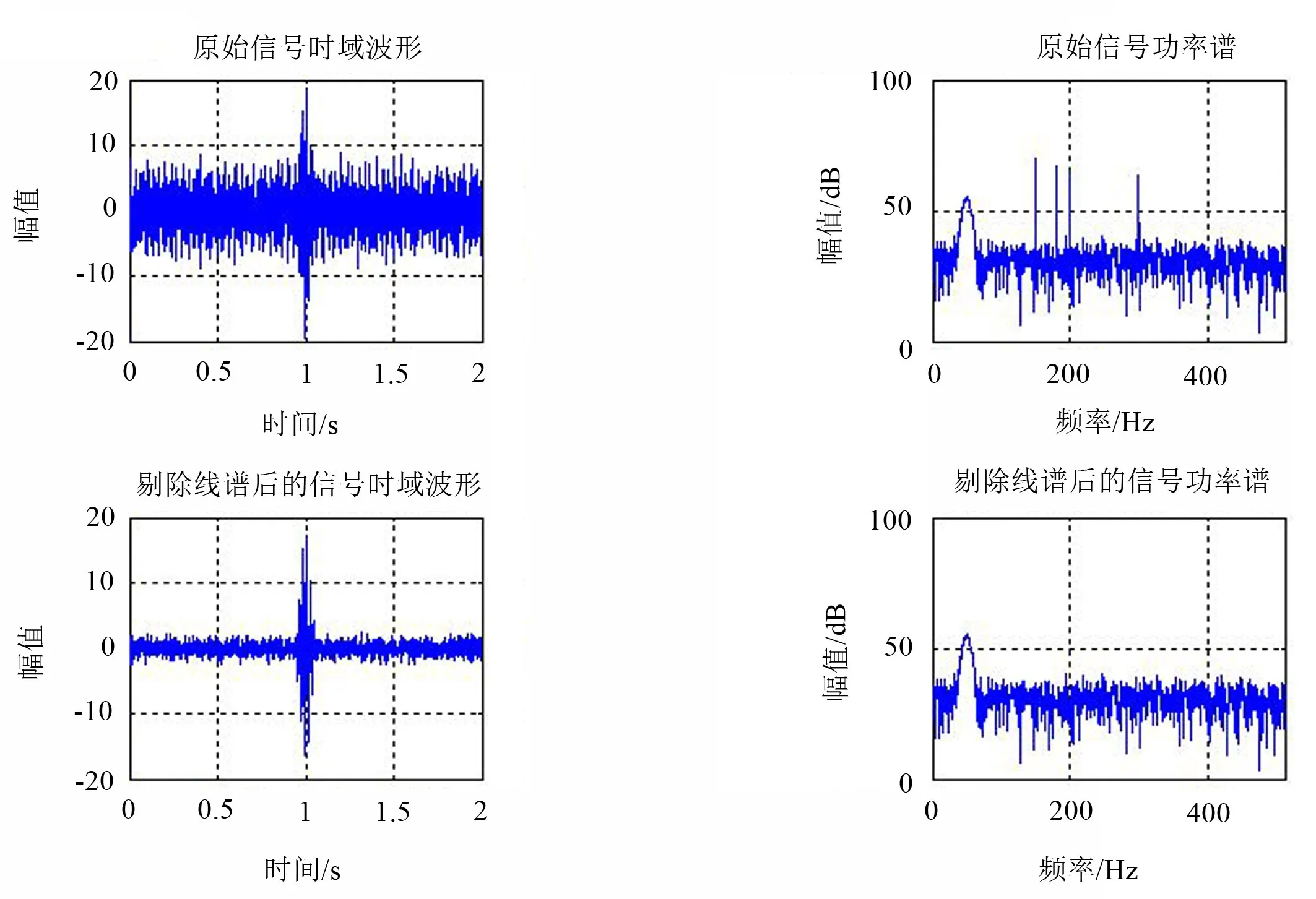
图7 输出信号功率谱图
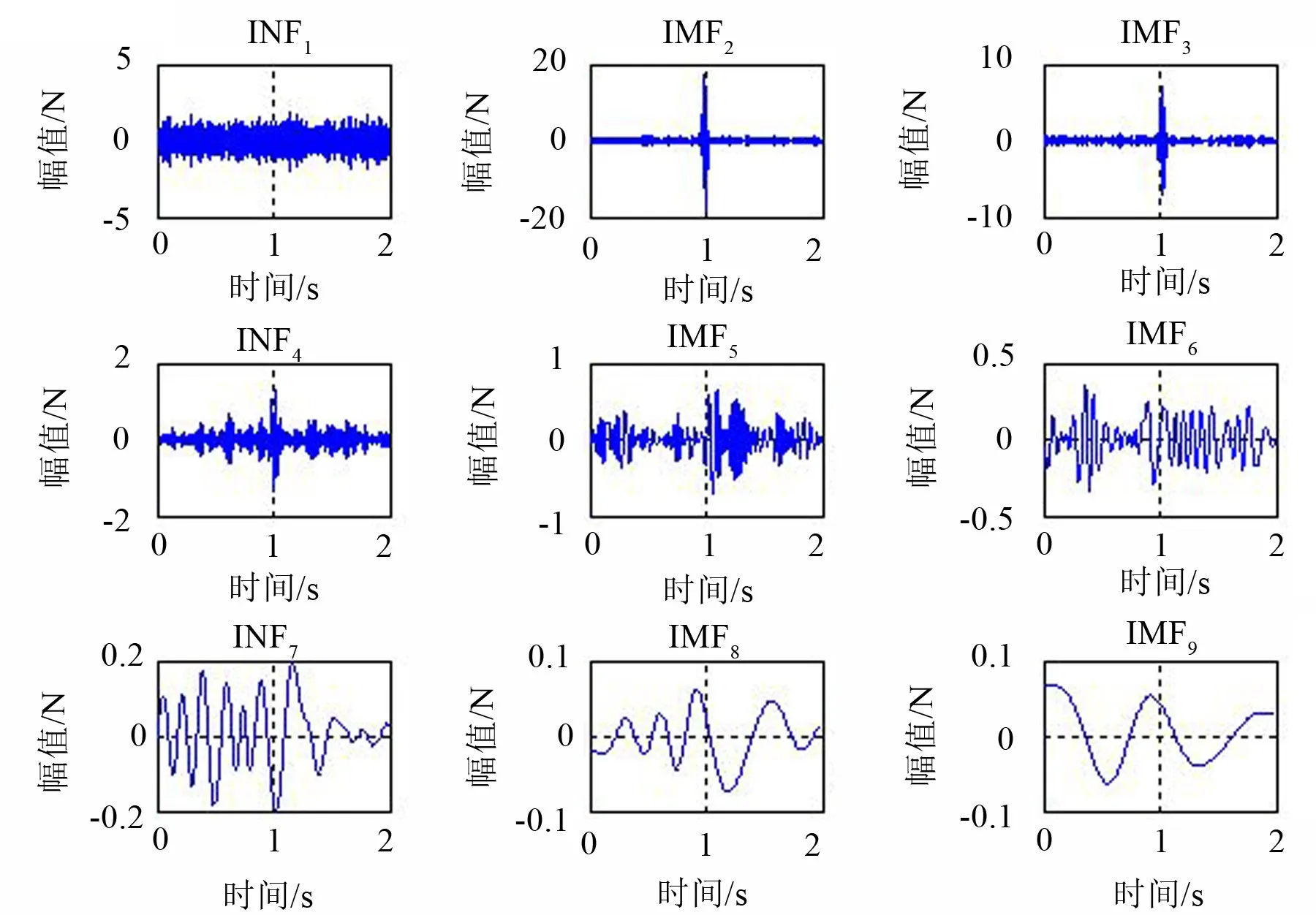
图8 剔除线谱后输出信号的IMF分量
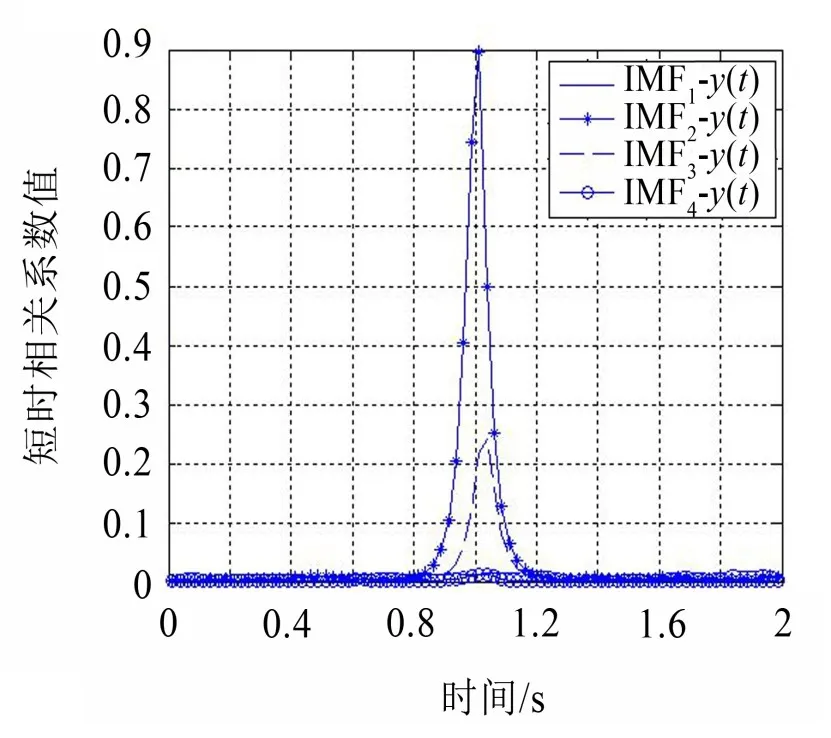
图9 主要IMF分量与输出信号之间的相关函数
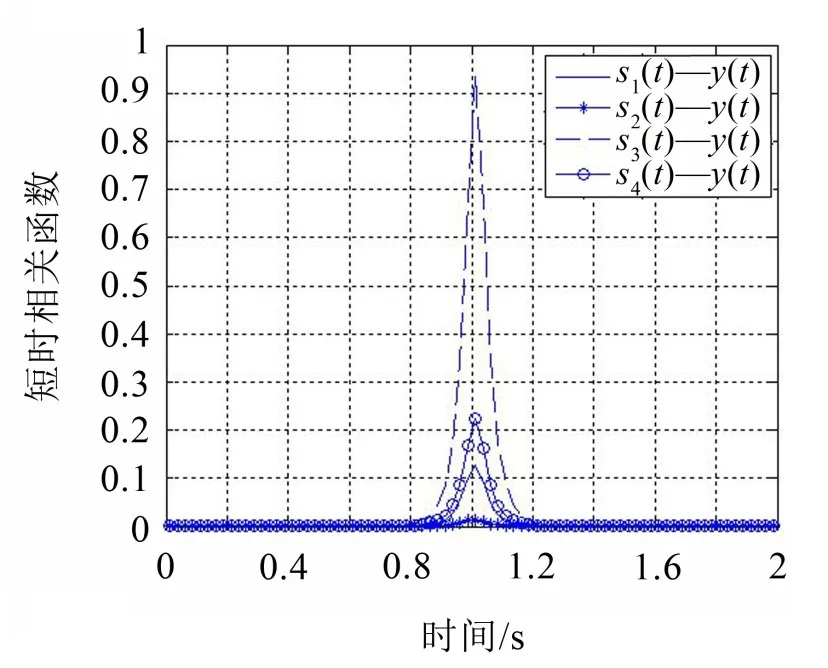
图10 输出信号与各输入信号间的相关函数
试验设备有3台,分别为两台变频电机和1台砂轮机,试验设备与设备安装方式如图12所示。
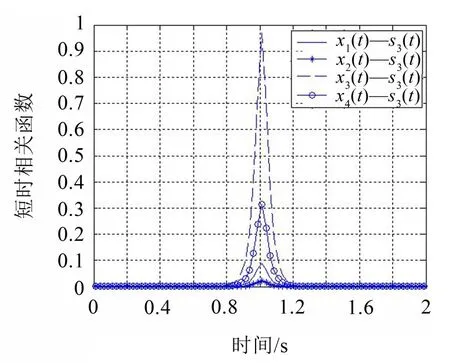
图11 瞬态信号与各输入信号间的短时相关函数图
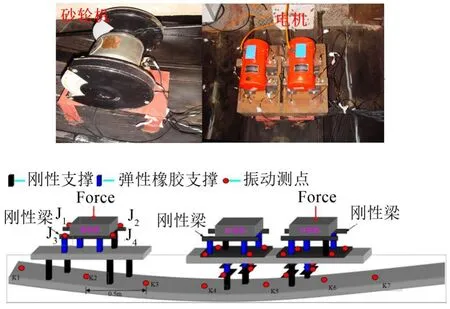
图12 试验设备与安装方式
砂轮机及变频电机安装和空间位置示意图如图12所示,利用力锤模拟瞬时激励力,分别开展砂轮机和1#电机激励试验,由图可见,1#电机和2#电机座在同一筏架上,筏架通过3条弹性支撑和1条刚性支撑与壳体相连,其中右下支撑为刚性支撑;1#变频的左上和右上机脚座于同一刚性梁上,然后分别通过刚性支撑和弹性支撑与筏架相连,左下和右下机脚座于同一刚性梁上,均通过刚性支撑与筏架相连,从而形成“三弹一刚”4条振动传递通道;2#电机的安装方式与1#电机相比,不同之处在于刚性通道的设置为右下机脚,其它3路为弹性支撑;砂轮机右上机脚为刚性支撑,其余为弹性支撑,具体分析结果如下。
依据上述机械设备安装方式,构建其振动至声传递的物理模型,如图13所示。
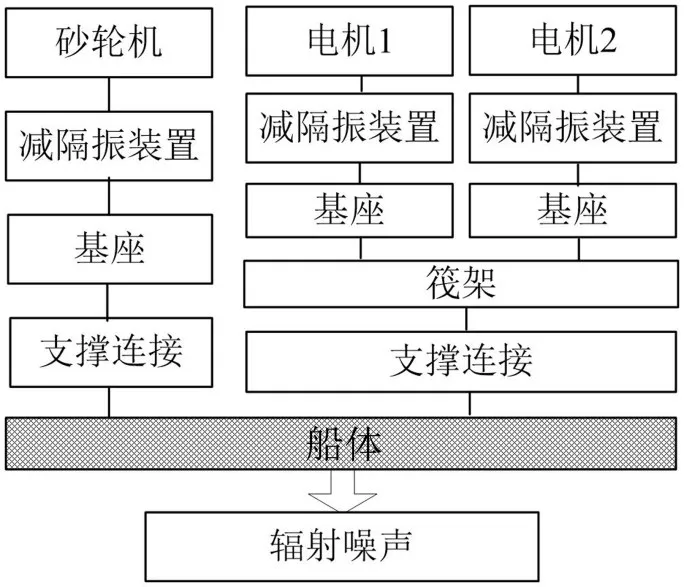
图13 振动传递路径物理模型图
在上述分析结果的基础上,同时激励测试获取的振动—声数据,利用本文建立的瞬态激励源传递路径识别方法,“由外如内”逐层递进式进行分析,确定瞬态噪声激励源的空间位置,然后利用短时相关法计算方法获取各个振动传递环节的信息相似程度,通过对比各环节相关函数值大小,最终获得瞬态噪声激励源振动-声的传递路径。
图14给出了辐射噪声时域波形图和频谱图,由图可见,在2 s附近存在瞬态信号,主要特征频带在1 000 Hz以下。
利用经验模态分解方法对辐射噪声进行分析,获得多个IMF分量如图15所示。
从时域波形结构上来看,分量IMF1~IMF5均表现为不同信号结构的瞬态信号。
对各IMF分量进行主分量分析,可得前5个主分量的贡献率达92.7%,对这5个IMF分量分别与辐射噪声进行短时相关分析,如图16所示。
由图可见,IMF1、IMF2和 IMF3分量相关系数值相对较大,而IMF4和IMF5相对较弱,因此,选择前3个IMF分量进行信息累加重构,获得主要反映辐射噪声中瞬态成分的信号cy(t)。
同理,分别对船体测点K1-K7进行分析,可得反映各船体测点信号中瞬态成分的重构信号,分别计算各信号与辐射噪声瞬态信号cy(t)之间的短时相关函数,选取各相关函数极大值,可得船体—辐射噪声相关函数值沿船体分布情况,如图17所示。
由图可见,在砂轮机对应船体测点K2与辐射噪声的相关性最强,K3次之,说明辐射噪声中瞬态特性主要来源于砂轮机对应的壳体部位。
为了进一步分析壳体瞬态噪声来源情况,以砂轮机对应壳体测点K2为输出,分析其与砂轮机各机脚测点之间的关联关系。
图18给出了壳体测点K2与砂轮机各机脚振动信号之间的短时相关函数,通过对比各相关函数之间的大小关系,可见,J2与K2的相关系数值最大,说明壳体测点K2中的瞬态信号主要来源于J2;由砂轮机的安装方式可知,测点J1、J3和J4对应的机脚—基座支撑为弹性,J2为刚性,因此,激励信号主要经砂轮机的刚性支撑传递至壳体。
综上所述,力锤激励砂轮机产生的瞬态能量主要由右上机脚,经刚性支撑传递至基座,再经对应壳体向水声场辐射噪声,与试验设置情况完全一致,验证了本文建立瞬态噪声激励源传递路径识别方法的有效性和实用性。
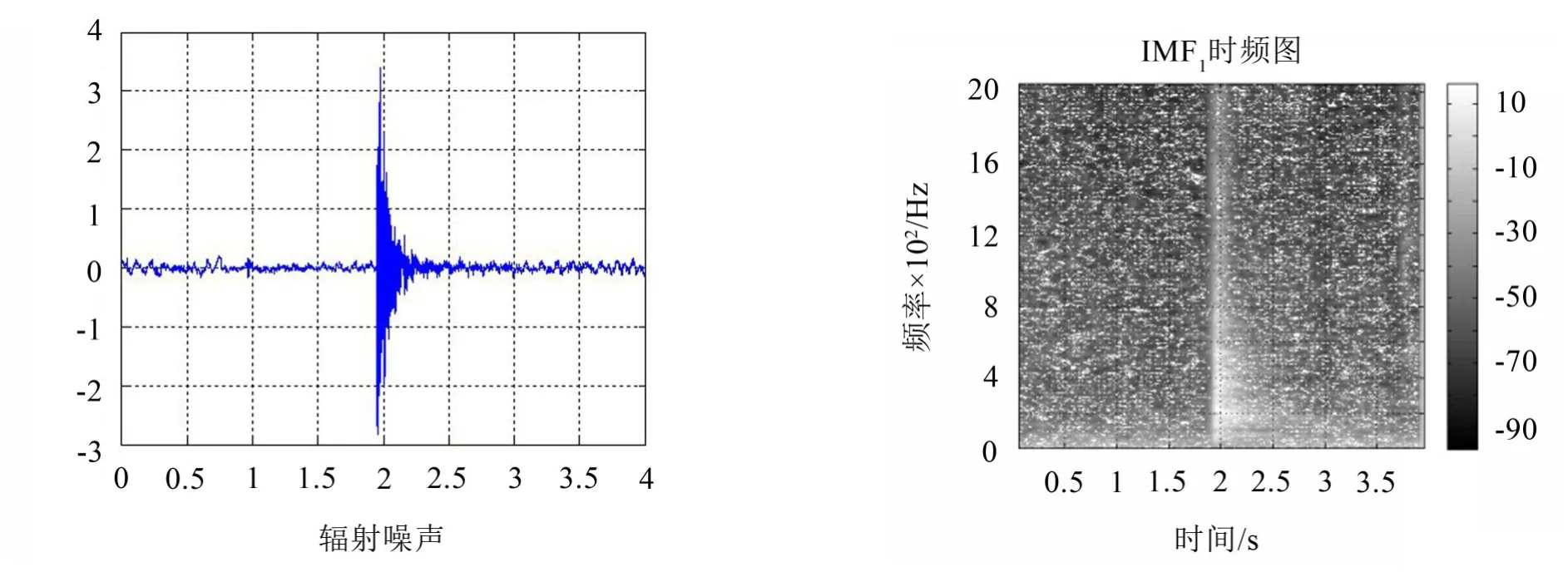
图14 辐射噪声时域和频谱图
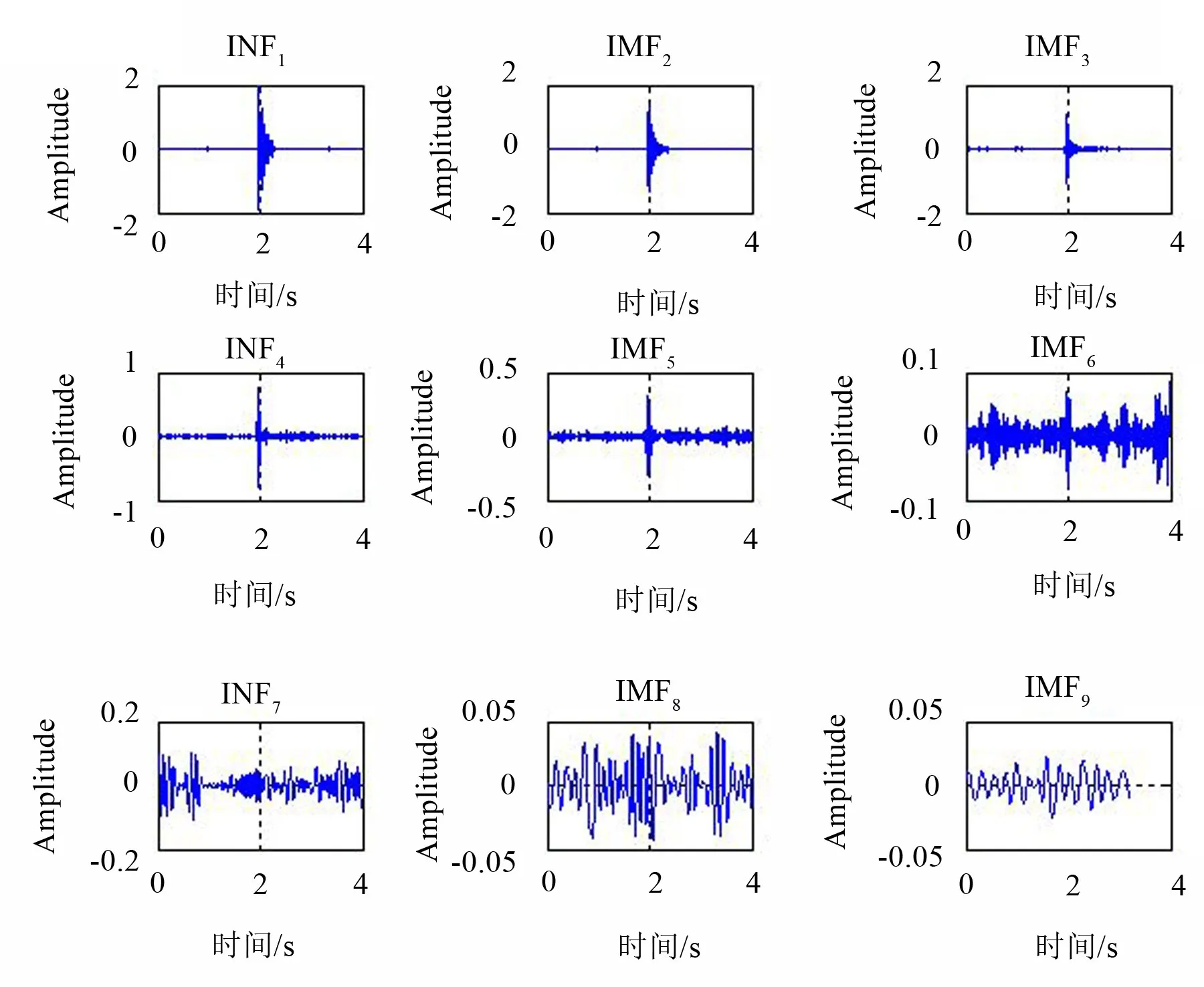
图15 辐射噪声各IMF分量时域波形图
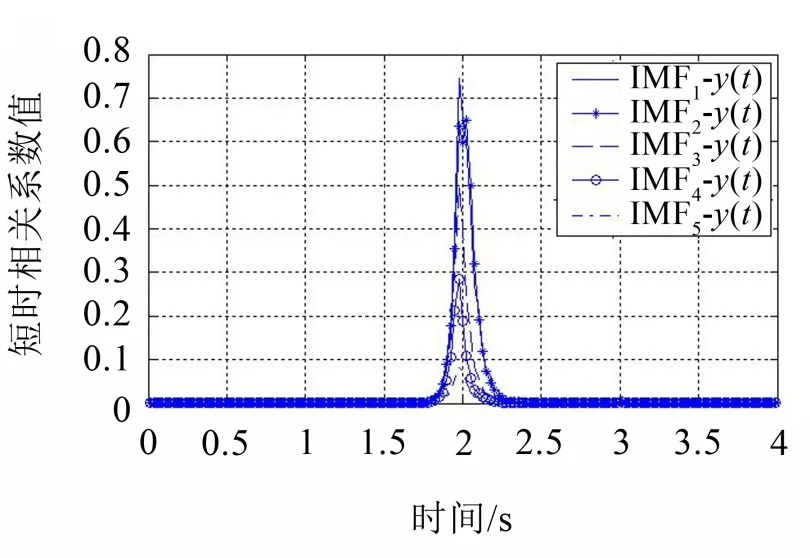
图16 主要IMF分量与辐射噪声的相关函数
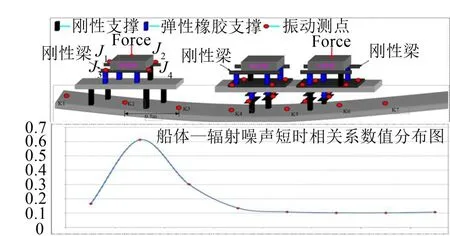
图17 船体—辐射噪声相关性沿船体分布图
4 结语
本文建立了舰船瞬态激励源振动形成辐射噪声的物理模型,提出了基于傅里叶变换的线谱提取技术,结合主分量分解方法和短时相关分析方法,从信息相似程度的角度,形成了瞬态噪声激励源传递路径识别方法,通过仿真研究给出了方法的理论可行性,并以实船为试验平台,开展复杂结构的瞬态激励源传递路径识别试验研究,利用建立的瞬态噪声激励源识别方法,构建激励源振动至辐射声的物理模型,采用从外往内逐层分解的分析方式,实现了瞬态激励源主要传递路径的准确识别,验证了该方法的工程有效性和实用性。
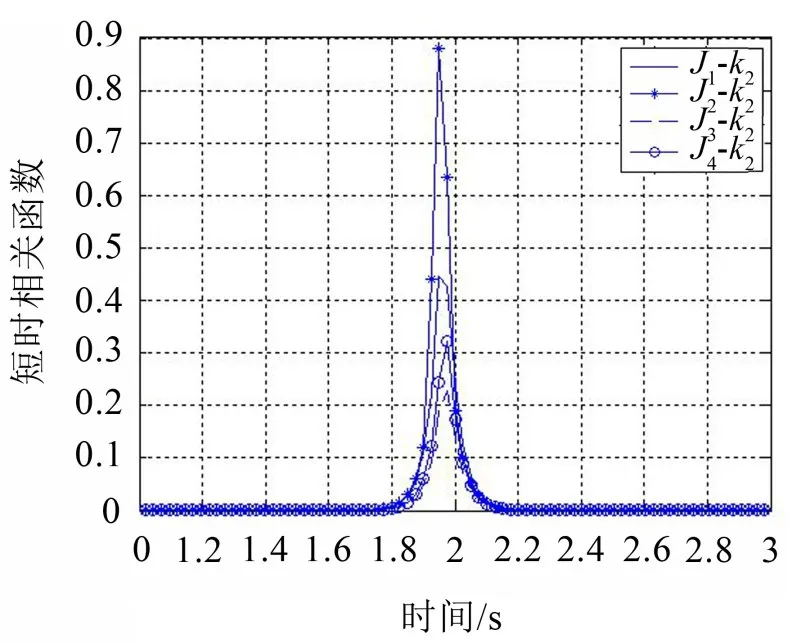
图18 瞬态信号与各输入信号间的短时相关函数图
