不同载荷识别的结构振动传递路径分析方法研究
2018-10-23陆英栋
张 磊,李 彬,梁 洁,陆英栋
(1.海军工程大学 动力工程学院,武汉 430033; 2.91206部队,山东 青岛 266102)
传递路径分析(Transfer Path Analysis,TPA)方法[1–2]主要用于处理振源激励—传递路径—目标测点响应的问题,其能够辨识振动响应系统的主要激励源和相应传递路径。依据辨识结果,研究人员可将相应的振源强度、路径声学灵敏度等参数控制在合理的范围内,使得振动或声辐射控制在预定目标值内。TPA方法主要涉及三个关键的问题:频率响应函数获取;工作载荷识别;TPA结果评价[3]。TPA方法涉及的工作载荷识别,可以通过力传感器进行直接测量[2]。直接测量法仅适合在测量环境可控的实验室中应用,在实际工程应用中,获取路径点激励力最有效且应用最广泛的方法仍是间接测量法。间接测量法主要有复刚度法(Complex Stiffness Method CSM)、参数化模型复刚度法、逆矩阵法(Matrix Inversion Method MIM)[4]。复刚度法测量需考虑实际结构的正确预载荷、实际运行时边界条件以及环境参数如温度等影响。因准确的动刚度数据获取比较困难,一种参数化表示的复刚度方法被提出来[5],该方法以工况数据为主同时辅以少量的频响函数数据,达到快速并较为准确地获取工作载荷的目的,国内宋海生等[6–7]将该方法应用到汽车车内振动传递路径分析,取得一定效果。但当耦合连接元件的刚度相对较大时,复刚度法获取工作载荷将存在较大误差,而在近似刚性连接的情况下,复刚度法将彻底失效。逆矩阵法[8]是获取路径点工作载荷的一种适应性更强的方法,是TPA方法中应用最广泛的一种方法。但逆矩阵法需要将振动设备拆除或在设备尚未安装在基座上时测量FRF,该项不足之处在很大程度上限制了逆矩阵法在工程实际中的有效应用。因此,若能在不拆卸振动端的情况下实现激励源的识别,势必将极大提高测量的效率,提高逆矩阵法的工程应用价值。为此,本文将系统深入地研究TPA方法中典型的路径载荷识别方法,并提出不受振源移除影响的逆矩阵法,结合振动模型比较融入新策略的逆矩阵法(MIM)、复刚度法(CSM)以及参数化模型的动刚度法在载荷识别时的适用范围、各自特点。
1 TPA方法基本理论
结构振动传递过程为机械设备产生的振动激励,通过基座的衰减或放大作用,传递到设备连接点上并表现为力激励,力激励使结构产生振动,从而辐射出噪声。对于某一激励源,如果已知某一路径上的传递函数和工作载荷,该路径对目标位置响应的贡献量可表示为

式中:Hi(ω)是传递函数(通常为频率响应函数),Fi(ω)为激励力的频谱。如果有m条路径,总响应可以是各路径分量的线性叠加

式中:X(ω)为目标点上的响应,可以是声压或加速度响应等。建立一个TPA模型需要两个要素:工作载荷和频率响应函数(Frequency Response Function,FRF)。目前,工作载荷和FRF的准确、高效获取仍存在较大难度,而这两项工作直接决定着TPA方法计算结果能否准确地反映实际情况。
2 路径载荷识别
为有效实现TPA算法,一项重要的工作就是确定路径点的工作载荷。工作载荷识别的方法有很多,既有时域的也有频域的。本节将主要研究几种能够运用到实际工程中的典型载荷识别方法,主要有直接测量法、复刚度法、参数化模型的动刚度法,并提出融入新策略的逆矩阵法。
2.1 激励力直接测量法
设备振动通过机脚传递到基座上的动态力,可以通过力传感器进行测量。通常力传感器安装在机脚和基座之间,使得设备产生的作用力通过力传感器传递到基座上。力传感器直接测量方法,可以减少测量中的不确定度的来源,在准确度上具有一定优势。但直接测量路径点的激励力在实际操作中会遇到很多问题:力传感器尺寸和安装条件会受到限制(尤其在汽车、舰船等复杂结构上,其内部空间有限,设备布置紧密);嵌入的力传感器有可能改变路径点的实际工作状态,导致测量值与实际情况不符;要完全满足力传感器的安装要求在工程中颇为不易,而安装出现极小的偏差也会导致测量误差急剧增加。由此可见,直接测量法仅适合在测量环境可控的实验室中应用,在实际工程中并不适用。而在实际工程应用中,获取路径点激励力最有效且应用最广泛的方法仍是间接测量法。间接测量法不需要嵌入力传感器,仅需要振动设备的相关结构参数及振动响应等条件就能获取路径点的工作载荷。
2.2 动(复)刚度法(CSM)
图1为典型的振动结构系统示意图,源S为主动设备端,接受体R为被动端,由图可知主动端S与被动端R经刚性或弹性元件连接,主动端设备激励产生振动能量通过连接元件传递到被动端,引起振动响应。与连接件相连的主动端和被动端,在连接处均产生不同振动方向、大小的位移。若结合实验测得的不同耦合元件的复刚度曲线函数,可利用复刚度法计算作用于被动侧上的工作载荷,其计算公式如下所示


图1 振动结构系统示意图
式中:Fi(ω)为第i条路径上的工作载荷;Ki(ω)为第i条路径的复刚度曲线函数;Xsi(ω)为第i条路径上主动侧与耦合元件连接处的位移响应;Xpi(ω)为第i条路径上被动侧与耦合元件连接处的位移响应。为更有效地实现复刚度法,在实际应用中应特别关注以下几点:
(1)复刚度测量应考虑实际结构的正确预载荷、实际运行时边界条件,以及环境参数如温度等影响。
(2)当连接被动侧和主动侧的耦合元件的刚度相对于主被动侧的局部刚度较大时,耦合元件两端产生的位移差相对于主动方和被动方的变形很小,实测位移差值较小易导致测量误差变大,进而使得载荷识别精度变差。此时复刚度法将不适合用于获取工作载荷,可采用下文给出的逆矩阵法。
2.3 参数化模型的动刚度法
以上复刚度法获取工作载荷时,需要准确地测量动刚度数据,然而受到诸多实际因素的影响,准确的动刚度数据获取比较困难,致使复刚度法的应用受到一定限制。为克服上述问题,引入一种参数化的处理方法表示动刚度,该方法以工况数据为主同时辅以少量的频响函数数据,达到快速并较为准确地获取工作载荷的目的。首先构造工作载荷的参数化模型。

式中:Fi(ω)为第i条路径上的工作载荷;Ẍsi,Ẍpi分别为主被动端的振动加速度响应。上式还可表示为

式中:Ki(ω)第i条路径的动刚度数据,将其分两种方式表示,一种是单自由度估计模型,利用单自由度系统模型拟合出一个参数化的动刚度表达式为

式中:mi,ci,ki表示该模型系统的质量、阻尼和刚度。该单自由度估计模型适用于弹性的耦合连接件,作用在该结构的耦合激励力就属于单自由度模型。而另一种方法则适用于刚性连接的多级等宽带估计模型,其核心是假设在整个分析频带内用等带宽的刚度常数拟合动刚度,动刚度具体表达式为

式中:kn表示某固定频率段内的等效常数值。此处,以单自由度模型来分析其具体实施过程,首先,选择恰当参考测点(如振动响应点或声场的声压响应点),参考测点的响应(以振动加速度为例)可表示为

将式(8)表示成矩阵的形式,对r种不同的工况,可表示为

或

由式(9)可知,除求解物理参数mi,ci,ki外,最关键的是选择不同工况下的响应数据(不同工况即为设备运行时的不同转速、负载等)。为保证式(9)有稳定的解,应满足r>3,即独立或不相关的工况越多,模型参数估计就越准确。最终,可利用最小二乘法求解即为矩阵的广义逆,实际计算中应特别注意矩阵Ζ可能存在的病态性导致结果计算误差。得到相应的物理参数,可依据式(4)和式(5)实现载荷识别,由此实现的传递路径分析方法称为OPAX法。
2.4 逆矩阵法(Matrix Inversion Method MIM)
当耦合连接元件的刚度相对较大时,上述动刚度法获取工作载荷将存在较大误差,而在近似刚性连接的情况下,动刚度法将彻底失效,此时逆矩阵法是获取路径点工作载荷的另一种有效方法。此处以主动端(激励源设备S)和被动端(接收结构体R)连接为例对逆矩阵法进行详细探讨,并提出适用于不同频响函数测量方式的逆矩阵法,即:一种将主动端拆除,分别在激励点上单独激励获取对应的频响函数;另一种,保留主动端时采用直接测量法或互易性的方法测量频响函数。具体如图1所示,结构系统C由主动端S与被动端R组成,S和R在a处经m条路径连接,b代表n个参考点的组合,如响应Xb表示n个参考点响应的向量即Xn×1。
对于一线性时不变系统,当有激励Fa(m个路径点激励力)时,存在响应(n个参考点速度响应),作用在接受体上的载荷力向量,可根据逆矩阵法估计如下

由系统的等效电路分析可知,a处的激励力可表示为

式中:HS,aa为子结构S在a点激励a处响应的频响函数(设备点导纳);HR,aa为子结构R在a点激励a处响应的频响函数(接受体点导纳);为主动端在a点处的自由振速,它取决于振动系统的内在运动特性,且和安装状态、实际工作情况、支撑均不相关,其是较佳的源特性描述参量。由自由振速可求得与之对应的钳制力Fbf,具体表达式为

将式(12)代入式(11)得到Fa,然后将其代入式(10)得

对于整个结构系统C,若在a处施加外部激励力Fe,得到a处的振动速度。

设设备S工作激励产生的响应与a处施加的激励载荷Fe时相同,因此在a处存在路径点的激励力为,其与a或b处的速度响应关系可表示为

将式(15)代入式(14)可得

依据结构系统的导纳与两个子结构的导纳的关系,上式表示为

由上式可见,Fe为未移除振源设备时作用在a处的外部激励力,为在该力作用下b处的速度响应,即存在以下关系式

因此,

此时,可将式(19)代入式(13)得到

式中:HC,ab表示在完整的结构系统C中,由参考测点b施加激励力,测量a处的响应,进而获取的频响函数,此为互易性测量FRF的方法。式(20)中的钳制力Fbf为恒力源,其仅与机械振动设备的本身特性相关,较好地描述了振动源的特性。分析可知,如振源设备易于拆除或结构设计之初未加装振源设备,此时可采用式(10)获取激励力;当振源设备不易移除时,实际工程中通常属于此种情况,可将式(20)求取的工作力作为逆矩阵法的输入,实现TPA。上述推导设备(主动端)与基座(被动段)刚性连接的情况下实现的,若设备和基座之间安装了隔振装置,即设备处于弹性安装情况。此时可将推导方程中的基座导纳HR等效为隔振装置上端的导纳HR′,同样可以得到类似的结论。
为了准确识别工作载荷,应合理布置参考测点的数目和位置,而且需要方程式(10)或式(20)中的频响函数的维数满足n>m。此时,频响函数矩阵HR,ba或逆矩阵不存在,上述直接逆矩阵法将不适合。这时方程没有精确解,但可求得最小二乘意义下的解。由于结构的模态特性,如果各个激励力引起的结构振动由同一个或少数几个模态作用,由激励引起的参考点的响应之间可能存在较强相关性,使得载荷计算的频响函数中包含的结构信息存在着很大的相似性,这将导致频响函数矩阵的病态。具有病态特性的FRF矩阵将导致不适定性问题的出现,该问题可能直接使得工作载荷的识别错误,而正则化算法正是一种解决此类不适定问题的有力工具[9]。
3 TPA方法比较验证
此处以图2的振动传递路径系统模型(现实中诸多结构均可以简化为与此类似的模型)为例探讨振动的具体传递过程,该模型为6自由度的线性时不变系统。其中,M表示质量,C表示阻尼,K表示刚度。M1为主动端(振动设备),设质量M1=100 kg,M2=10 kg,M3=30 kg,M4=50 kg,M5=50 kg,M6=200 kg;刚度K1=40 kN/m,K2=10 000 kN/m,K3=10 000 kN/m,K4=450 kN/m,K5=10 000 kN/m,K6=5 000 kN/m,K7=50 kN/m;阻尼C1=40 Ns/m,C2=10 Ns/m,C3=20 Ns/m,C4=100 Ns/m,C5=25 Ns/m,C6=25 Ns/m,C7=40 Ns/m。主动端的振动能量通过两条传递路径(M1®M2®M3®M6;M1®M4®M5®M6),传递至被动端M6引起目标点的响应x6。可见,该模型存在两个不同的路径激励点M2和M4,激励力分别为Fe2和Fe4。即目标点的响应可表示为x6=H62Fe2+H64Fe4。
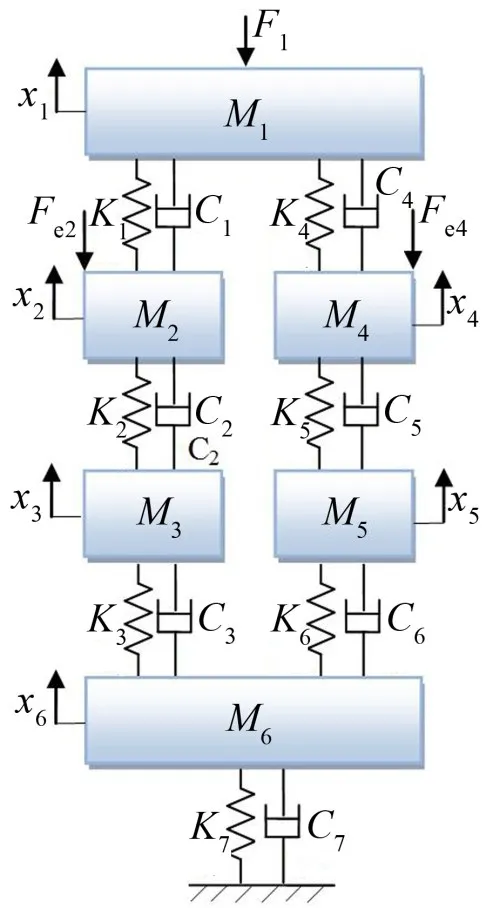
图2 振动传递路径系统模型
上节详细探讨了可应用到工程实际中的载荷识别方法,这些识别方法应用于TPA时具有不同的前提条件、适用范围以及计算效率。为此,结合振动传递路径分析模型(见图2),综合评估路径载荷获取方法和频响函数获取方式在TPA中的应用效果。本节不考虑随机噪声对频响函数估计的影响,采用H1估计方法获取频响函数[10],具体分两种方式:一种将主动端(M1)拆除,分别在M2和M4上单独激励,即利用直接法获取频响函数(Case I);另一种,保留主动端,可在M6等测点施加激励力,在M2和M4处提取响应,即利用互易法获取FRF(Case II)。在M1上施加外部激励力,激励频率范围为0~300 Hz,激励幅值为6 N,将M6作为目标点,TPA方法的程序均通过MATLAB软件编程实现。
此处,将三种TPA方法在目标点M6计算的位移合成幅值和真实响应幅值进行对比,用以判断不同方法的有效性。图3到5分别为MIM-TPA,CSMTPA,OPAX方法计算的M6处位移响应值,由图比较可以看出,三种方法在Case I时,TPA的合成响应与真实响应几乎重合在一起。而在Case II时,三种方法TPA合成结果与Case I相比,其精度存在不同程度的降低。CSM-TPA法在低频段出现较小偏差,合成性能稍逊于MIM-TPA法。OPAX法合成结果存在较大误差,远大于CSM-TPA法和MIM-TPA法。MIM-TPA法除了个别点有轻微的偏差以外,Case I和Case II时的结果均表现较好,误差产生的原因为:Case II时互易法测量FRF,测量点与真实的路径点不一致导致计算误差;在固有频率处,获取的频响函数矩阵存在病态,而计算误差在载荷识别求解过程中被扩大,最终传递到TPA计算结果中。

图3 MIM-TPA法Case I和Case II时合成位移值

图4 CSM-TPA法Case I和Case II时合成位移值
由MIM-TPA,CSM-TPA,OPAX法计算的响应幅值与真实位移响应幅值之间的误差曲线(见图6,7),可进一步看出,在Case I情况下,三种方法合成值与真实响应吻合非常好;在Case II情况下,CSMTPA和OPAX法合成值与真实值偏离很大,尤其是OPAX法,除了在某些峰值频率处吻合略好以外,其他频率处合成结果基本不可信,而MIM-TPA法依然保持着比较可靠的合成结果。

图5 OPAX法Case I和Case II时合成位移值

图6 Case I时合成值与真实值的误差曲线

图7 Case II时合成值与真实值的误差曲线
综上,动刚度方法和逆矩阵法在Case I时TPA合成结果精度相当,而Case II时前者的合成精度有所下降。这主要由于在求解FRF时主动端(振动设备)未解耦,使得计算存在初始刚度,造成误差。而参数化模型的复刚度法对动刚度的简化,进一步扩大了计算误差。
2.4.2 物理参数对TPA方法性能影响
不同的物理参数如质量M,阻尼C,刚度K对结构(图2的模型)的振动传递特性和振动响应存在不同程度的影响,如振源的机械阻抗直接受振源质量M1,阻尼C1、C4以及刚度系数K1、K4的影响,改变这些参数将影响主动端(振源)和被动端(接受体)之间的阻抗匹配,进而影响整个振动传递的过程。本节主要考虑刚度系数的变化对TPA结果的影响,将刚度系数Ka(K1=4 N/m,K4=45 N/m)变化为Kb(K1=4×108N/m,K4=4.54×109N/m)。振动位移的响应值为复数(包括幅值和相位信息),为真实反映各种方法的TPA合成结果,表1计算出了位移响应合成值与真实值的相对误差水平。
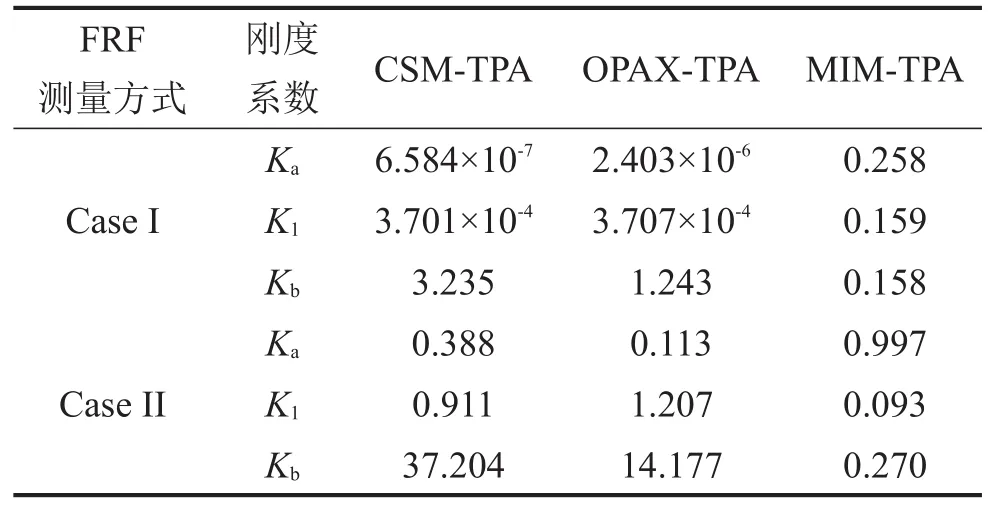
表1 位移响应合成值与真实值的相对误差水平
由表可以看出,在Case I且刚度系数较小的条件下,CSM-TPA、OPAX法合成响应结果均具有较高精度,MIM-TPA法在个别频点处误差偏大。在Case II时,OPAX的合成响应与真实值间的误差急剧变大,结果不可靠。而振动源拆除与否对MIM-TPA法合成结果影响有限,即误差没有明显的增加或减少。随着刚度系数增加到较大值时,在CSM-TPA、OPAX法合成的目标点响应值与真实值的误差显著增加,尤其对于OPAX方法。造成以上误差的原因主要为耦合元件两端产生的位移差相对于主动方和被动方的变形很小,实测位移差值较小易导致测量误差变大,该误差会传递到估算的激励力结果中,导致累积误差增大,最终使得TPA合成结果精度降低。而MIM-TPA法因综合考虑参考点振动响应信息,反映结构振动信息较全面,TPA合成结果比较可靠且具有较好的稳定性。
4 结语
本文比较了复刚度法(CSM)、参数化模型的动刚度法、融入新策略的逆矩阵法(MIM)的适用范围、各自特点,建立了相应的TPA方法即CSM-TPA方法、OPAX方法、MIM-TPA方法,并进行系统深入的分析。多自由度模型算例分析结果表明:测量FRF时拆掉主动端,应用CSM-TPA、OPAX、MIM-TPA法均可得到较好的TPA合成结果。若刚度系数已知,CSM-TPA法应优先考虑,否则可选择OPAX法。而在保留主动端的情况下,MIM-TPA法是最佳的选择,若此时刚度系数较小,CSM-TPA法也能得到可接受的计算精度,但随着刚度系数的不断增加CSMTPA、OPAX法很可能失效,此时只能选择MIM-TPA法。若刚度系数未知,可选用MIM-TPA法和OPAX法,当两种方法均能达到预定的精度要求时,应优先选择计算更快、更易实现的OPAX方法。可见,TPA中载荷获取方法应综合考虑结构特性、设备的布置情况以及计算时间、精度要求。
