一种高精度杨氏模量测量仪设计
2018-10-20李新超
李新超

摘要:金属的杨氏模量是反映金属材料力学性质的一项重要参数,针对现有杨氏模量装置的不足,该测量仪利用改进的迈克尔逊干涉仪通过干涉条纹精确测定使得金属丝的微小伸长量的测量可以达到0.1nm,同时设计一个测量拉力精确度可以达到0.OOO1N的测力装置在测量金属丝伸长量的同时进行拉伸力的测量。通过伸长量与拉伸力的同时测量提高了金属丝的杨氏模量的测量精度。
关键词:杨氏模量;迈克尔逊干涉仪;应变拉力
中图分类号:TG115.5
文献标识码:A
文章编号:1672 - 9129(2018)12 - 0101 - 01
引言:金属的杨氏模量是反映金属材料力学性质的一项重要参数,与外力及物体的形状无关。普通物理实验中通常采用拉长法进行测量,其中最关键的是需要对金属丝在拉力作用下长度的微小变化量进行精确测量[1],目前国内外对杨氏模量的测定上基本上都还在应用光杠杆镜尺法或者在这个方法的基础上加以改进,有采用光杠杆、霍尔位置传感器、PSD位置传感器、叠栅条纹技术、读数显微镜、单缝衍射等方法测量这一微小伸长量,这些方法都取得了较好的测量效果,但是精确度不够高,这使得金属应变特性的细微差别就存在着很大的误差[2]。国内外利用迈克尔逊干涉仪而研制出的仪器设备基本在于对光的波长进行测量[3],本文利用迈克尔逊干涉仪原理,通过改造迈克尔逊干涉仪根据光波长来测定微小的长度实现对金属丝的在拉力作用微小伸长量进行测量,在测量微小伸长量的同时,对拉伸产生连续缓慢变化的微小变化力的大小进行测量,应用迈克尔逊干涉仪与高精度电子测力仪器相结合提高金属丝杨氏模量测定的精确性和便捷性。
1 系统功能及方案设计
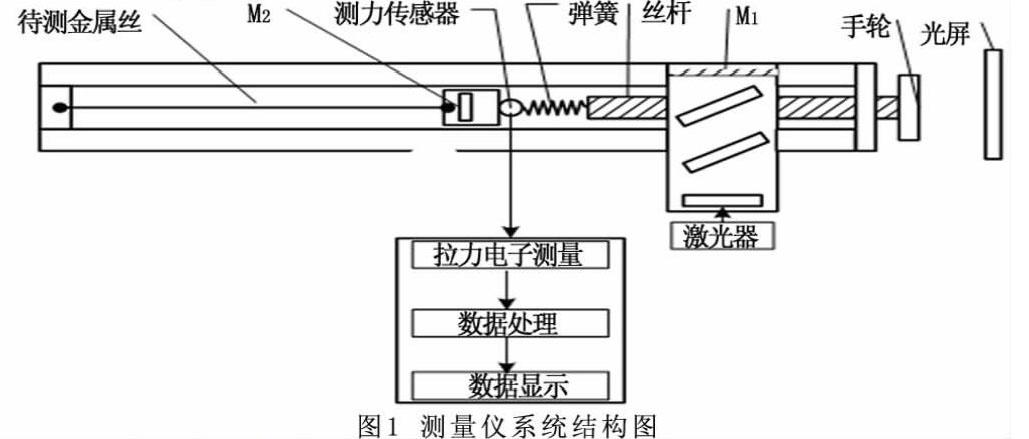
系统的设计结构如图1所示,主要利用迈克尔逊干涉仪改造实现,在迈克尔逊干涉仪的基础上,延长迈克尔逊干涉仪导轨的长度,将被测金属丝一端固定导轨上,另一端与载反射镜M2的滑块相连,滑块同时与电子测力计相连,测力计一端与弹簧伸缩装置相连。通过手轮带动丝杆转动,使弹簧伸缩装置产生拉力,来拉动测力计,带动反射镜M2的滑块拉伸金属丝,反射镜M2的移动导致光程差的改变,使得等倾干涉圆环移动(条纹涌出或陷入),进而测得待测钢丝的伸长量。这样设计出的测量精确度可以达到0.1nm的高精确度,通过增加图中所示测力传感器,实现对拉伸过程中拉力的连续测量。
实验时,通过旋转干涉仪的手轮,实现对待测金属丝的拉伸,在拉伸的过程中,随着金属丝的拉伸产生微小的位移,如式(1)利用干涉圆环变化数目计算出金属丝微小拉伸量。同时通过测力计读出拉力ΔF大小。其中n为干涉圆环移动的数目,λ为人射光波长。代人金属丝杨氏模量的计算公式(2),即可求得金属的杨氏模量。
△l=nλ/2 (1)
y=8L/πd2λ·ΔF/Δn=8L/d2λ·ΔU/n·F/U (2)
该方法与传统的光杠杆放大法计算杨氏模量[1]的计算公式(3)相比少了二个测量的量,减少了产生测量误差的机会,微小量ΔXi测量精度的提高,能有效地提高测量实验的结果精度。
Y=8ΔAF·L·D/πd2bxi (3)
2 系统设计实现
2.1 伸长量的测量设计。迈克尔逊干涉仪是利用干涉条纹精确测定长度或长度改变的仪器。如图2所示C2是一面镀上半透半反膜,M1、M2为平面反射镜,M1是固定的,M2和精密丝相连,使其可前后移动,最小读数为10-4mm,可估计到10-5mm,M1和M2后备有几个小螺丝可调节其方位。当M2和M1严格平行时,M2移动,两平面镜之间的“空气间隙”距离增大时,中心就会“吐出”一个个条纹;反之则“吞进”一个个条纹。
通过旋转干涉仪的手轮,实现对待测金属丝的拉伸,在拉伸的过程中,随着金属丝的拉伸产生微小的位移△l,同样M2也产生微小的位移△l,在M2移动的过程中,在光屏上会观察到非定域干涉条纹,干涉条纹的形状、疏密及中心“吞”、“吐”条纹随光程差的改变而变化情况,通过已知的光的波长进行实验,利用干涉圆环变化数目计算出金属丝微小拉伸量△l=n·λ/2,其中λ为已知的光波长,n为干涉圆环变化数目,通过这种方法测量计算出来的微小伸长量可以达0.1nm的高精确度。
2.2 拉伸力△F测量的设计:应用电阻应变片制成的传感器作为测力探头,把这个测力探头安装在经过改装的迈克尔逊干涉仪上组成一个新的物理实验仪器:迈克尔逊测量实验仪(如上实物图)。通过像一般的迈克尔逊干涉仪的操作方法进行对迈克尔逊测量实验仪内的金属丝的伸长量的测量,通过实验仪金属丝的伸长量的改变产生的拉伸力作用在测力探头上,这样测力探头就可以把金属丝的微小拉伸力△F测量出来。这个测量出来的力经过测力处理显示装置直观的显示出来。
如图3所示,力的测量是在进行微小伸长量测量的过程中,金属丝的微小长度的改变产生了拉伸力,这个拉伸力通过对测力探头的作用,使得测力探头能够把这个拉伸力测量出来。这个测量出来的力先通过力的非电量的电的转变,再通过采样保持电路进行处。使得力的测量更加接近拉伸力的真实值,减小了误差的产生。
由于测量出来的力是一个微小变化的力,转换成电压值的表示也是一个微小变化的数值。为了方便进行数据的处理,通过多级放大电路进行放大,并且在放大的过程中对数据进行补偿处理。
应用高精度的A/D转换元件把经过处理的电压值进行数字化的处理,并把这转换结果经过一个优秀的MUC进行数据运算还原,这种测力法相对于传统的力的测量,不但操作简单,而且可以达到0.OO1N数量级的测量精确度。
3 金属丝杨氏模量实验数据的测量
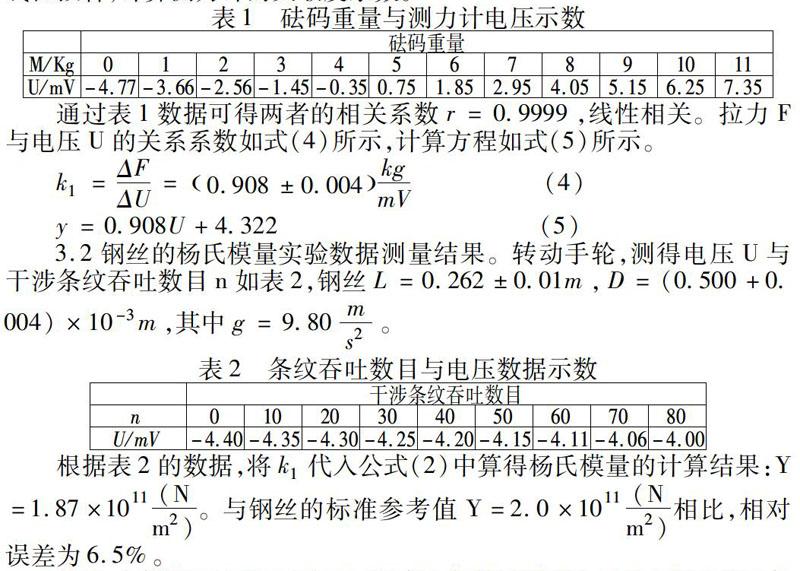
3.1 拉伸力ΔF测量定标。依次向测力计的下端砝码盘中加等质量的砝码M,从数字电压表中读出对应电压输出值U,数据记录在表(1)中,分析拉力和电压的线性相关系数,用最小二乘法进行线性拟合,计算测力计的灵敏度系数。
通过表1数据可得两者的相关系数r=0.9999,线性相关。拉力F与电压U的关系系数如式(4)所示,计算方程如式(5)所示。
k1=ΔF/ΔU=(0.908±0.004)kg/mV (4)
y=0.908U+4.322 (5)
3.2鋼丝的杨氏模量实验数据测量结果。转动手轮,测得电压U与干涉条纹吞吐数目n如表2,钢丝L=0.262±0.001m,D=0.500 +0.004)×l0-3m,其中g=9.80m/s2。
根据表2的数据,将k1代人公式(2)中算得杨氏模量的计算结果:Y=1.87 x1011(N/m2)。与钢丝的标准参考值Y=2.0x10ll(N/m2相比,相对误差为6.5%。
结语:本仪器通过将迈克尔逊干涉仪与拉伸法测量金属丝的杨氏模量仪有机的结合,测量金属丝伸长量的方法与通过迈克尔逊干涉仪测量光波的波长的方法相同,相比于传统通过光杠杆放大法对杨氏模量的测量,在测量精确度上有了很大的提高,而力的测量是通过测量金属丝拉伸量的过程中转动手轮,使内置的弹簧伸缩产生拉伸力,通过测力探头测量出并通过测力显示装置直观显示出来。同时改进了测量的操作方法,使得实验的操作更加方便。
参考文献:
[1]李儒颂,叶文江.金属丝杨氏模量测量装置的设计[J].大学物理实验,2014,v.27;No.108(5):51 -53.
[2]王玉清,胡晓云,任新成,等.测量金属杨氏模量的新方法电感式位移法测量金属杨氏模量[J].实验室研究与探索,2004,23(4):21 -23.
[3]周晓明.三种杨氏模量测量方法比较[J].实验科学与技术,2011,09(6):97 -99.
