应用模式培养下现代控制理论实验课程建设
2018-09-14王立红
王立红
辽宁工业大学电气工程学院 辽宁锦州 121001
现代控制理论是自动化专业大学三年级的一门重要学科技术基础必修课,以经典控制理论为基础,以线性代数为先修课程[1-3]。该课程以状态空间法为基础,以矩阵和向量空间理论为数学工具,讨论多变量系统的分析和设计问题[4-6]。由于该课程具有较强的理论性、枯燥的分析方法和烦琐的计算公式让学生感到千头万绪,误以为现代控制理论仅仅是数学问题,掩盖了状态空间法的工程背景,降低了学习兴趣[7]。笔者根据多年的教学经验,以培养创新意识、创新精神、创新能力为目标,利用现有的自动控制理论实验箱,开发现代控制理论实验,同时进行MATLAB仿真实验,对相关内容进行分析比较,激发学生的学习兴趣,培养学生的动手能力,提高学生分析和解决问题的能力,取得了良好的学习效果,适应当代社会需求。
1 实验项目的确定
现代控制理论的主要内容可以分为三大部分,即数学模型的建立、多变量系统的分析、线性定常系统的综合[8-10]。数学模型的建立实际上就是建立状态空间表达式和不同模型之间的转换,由微分方程建立状态空间表达式,由传递函数建立状态空间表达式。多变量系统的分析包括系统运动状态的分析(也就是状态方程的解)、能控性和能观测性分析以及李雅普诺夫稳定性分析[11]。线性定常系统的综合即系统设计,包括状态反馈极点配置和状态观测器的极点配置。我校现代控制理论实验为8学时,设计有4个实验项目。
1.1 状态空间表达式的建立及模型转换实验
本实验首先已知系统的传递函数,由MATLAB建立系统的状态空间表达式,并完成不同模型之间的转换,包括能控标准形、能观测标准形、对角标准形和约当标准形。然后在自动控制理论实验箱上完成上述各种模型的搭建,使学生熟悉状态空间表达式与实际电路的对应关系,掌握利用有源网络验证状态空间模型的方法,为后面的实验奠定基础。
1.2 系统运动状态分析实验
本实验已知系统的状态空间表达式,首先求出在单位阶跃信号输入下系统的状态响应和输出响应,从理论上分析系统状态的运动情况以及输出响应曲线的形状。然后使用MATLAB仿真软件,由Simulink建立仿真模型,通过示波器观察系统的状态响应和输出响应曲线。最后在实验箱上设计与状态空间表达式对应的电路,测试实验结果并与仿真结果进行比较。
1.3 状态反馈极点配置实验
本实验为开放性实验,由学生根据实验要求自行设计方案,搭建实验电路,完成实验内容。已知开环系统的状态空间表达式,设计一个状态反馈闭环系统,使其极点位于期望的极点位置上。这里的开放性体现在开环系统的状态空间表达式不同,闭环期望极点不同,所以每名学生设计的方案不同,实验结果也不一样。
1.4 观测器极点配置实验
本实验与状态反馈极点配置实验相似,根据已知的状态空间表达式,设计一个状态观测器,并将观测器的极点配置在期望的极点位置上。其目的是使观测器的极点以最快的速度逼近系统的真实状态,以便构成状态反馈闭环系统。
2 实验内容
本文以状态反馈极点配置实验为例,给出实验目的、实验原理、实验要求和实验步骤等,学生在此基础上设计状态反馈矩阵k,利用MATLAB中的Simulink[12]建立仿真模型,观测开环系统和闭环系统的单位阶跃响应曲线,分析极点配置的作用。然后设计实验电路,选择元器件参数,由实验箱完成实验,并与仿真结果进行比较。
2.1 实验目的
一是掌握状态反馈极点配置的原理;二是熟悉MATLAB仿真软件;三是用状态反馈对闭环极点进行任意配置。
2.2 实验要求
给定一个二阶系统,根据性能指标确定闭环期望极点,通过选择反馈矩阵k使闭环极点位于期望的极点位置上。建立仿真模型,分析极点配置的作用。搭建实物电路,观察状态反馈前后系统的输出,与仿真结果进行比较。
2.3 实验原理
状态反馈极点配置就是通过选择反馈矩阵K,使闭环系统的极点位于所期望的一组极点的位置上,从而使系统具有满意的动态品质。反馈矩阵K的计算步骤如下。

由于线性变换不改变系统的特征值,所以∑0的特征多项式为:
一个响彻神州的食品品牌,一个由40万元起家的行业巨头,一个低调沉默的企业家,一个发生在深圳的创业神话,他构建起目前世界上最大的布丁王国。
(3)根据给定的n个期望闭环极点令f (s)= f*(s),得:
(4)根据状态反馈控制规律在变换前后的表达式,可得原系统的状态反馈矩阵为。式中P为将状态方程化为可控标准形的变换矩阵。
2.4 实验步骤
设计实验步骤如下:
(2)建立开环系统的仿真模型如图1所示。

图1 开环系统的仿真模型
测试系统在单位阶跃信号作用下的响应曲线如图2所示。

图2 开环系统的单位阶跃响应
s1, s2,… ,sn,求期望特征的多项式为:
由图2可见,开环系统不稳定,引入单位负反馈构成闭环系统,单位阶跃响应曲线如图3所示。

图3 单位负反馈系统的阶跃响应
由图3可见,引入单位负反馈后,系统稳定,但是调节时间为20 s左右,响应速度较慢,为了进一步改善系统性能,引入状态反馈,仿真模型如图4所示。

图4 状态反馈闭环系统仿真模型
测试系统在单位阶跃信号作用下的响应曲线如图5所示。

图5 状态反馈闭环系统的单位阶跃响应
由图5可见,加入状态反馈之后,不仅可以使闭环系统稳定,而且超调量小于10%,相对稳定性大大提高。通过MATLAB仿真可以使学生直观了解状态反馈极点配置的作用,避免了纯理论讲解的枯燥性,激发学生的学习兴趣,提高课堂效率。
(3)在自动控制理论实验箱上搭建状态反馈前后的实验电路如图6和图7所示,测量系统的单位阶跃响应,与仿真结果进行比较,验证设计电路的正确性。
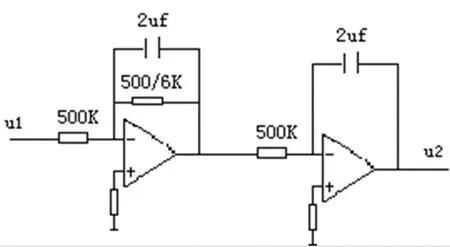
图6 开环系统实验电路
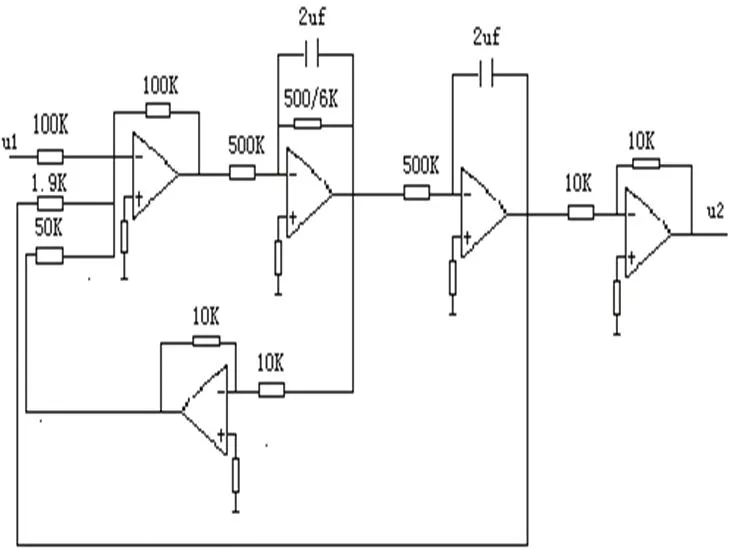
图7 状态反馈闭环系统实验电路
3 结语
本文利用自动控制理论实验箱和MATLAB仿真软件开发现代控制理论实验,确定了实验项目,并以状态反馈极点配置实验为例,设计了一个开放性实验的内容和步骤,实验教学中注重以下几方面。
(1)开环系统只规定阶次,模型学生可以自主选择。
(2)闭环期望极点需要根据性能指标确定,必须利用自动控制理论的内容,做到前后知识有效衔接。
(3)状态反馈矩阵的设计,可以巩固对理论知识的理解。
(4)利用MATLAB软件进行仿真,分析状态反馈极点配置的作用。
(5)自行设计实际电路,选择元器件的参数,测试实验结果,并与仿真结果进行比较。
实践表明,利用自动控制理论实验箱和MATLAB仿真软件开发现代控制理论实验,不仅节约了设备的投资,减少了实验场地,而且调动了学生学习的积极性和主动性,培养了学生的动手能力,提高了学生的计算机应用能力,加深了学生对课堂理论知识的理解,为应用型人才的培养奠定了坚实的基础。
