质心调整质量块位置对某六轮车抗倾覆能力的影响
2018-09-06吴文文刘西侠贾伟健于魁龙
吴文文, 刘西侠, 宋 磊, 贾伟健, 于魁龙
(1. 陆军装甲兵学院车辆工程系, 北京 100072; 2. 77231部队, 云南 临沧 677000)
轮式车辆越垂直障碍的能力主要由车辆接近角、离去角、质心位置、车轮驱动力和半径等因素决定,驱动力足够时,传统六轮车能够越过垂直障碍的高度通常不超过轮胎直径的1/2[1- 2]。部分具有摆臂功能的轮式车辆,通过摆臂调整姿态,可越过大于其车轮直径高度的垂直障碍[3]。文献[4]、[5]的作者分别研究了6×6无人地面车辆和轮腿复合式移动机器人的越障性能和转向性能等,在越垂直障碍时,六轮车的前摆臂向前摆动,后摆臂向后摆动,增大了与地面的包络面积,增强了六轮车的抗倾覆能力,进而提高了车辆越垂直障碍的高度。其中,文献[5]中研究的轮腿复合式移动机器人用六轮独立驱动,其框架长1 068 mm,摆臂长200 mm,通过摆臂的摆动可越过车轮直径1.5倍的垂直障碍,其越垂直障碍最大高度为200 mm,跨越壕沟最大宽度为350 mm。以上研究对六轮车越垂直的最大高度、越壕沟的最大宽度、越障时的车身姿态进行了分析,为越障方面的研究提供了思路,但对越障过程中六轮车本身的状态,如稳定性、动力性等直接影响六轮车顺利越障的条件研究较少。为进一步提高其越障能力[6]和地面适应性,笔者在六轮车上增加了一个折腰自由度,并在后车体上增设了一个可前后移动、用于调整整车质心的质量块,以研究质心调整质量块位置对车辆越障时的抗倾覆能力的影响。
1 折腰- 摆臂六轮车的结构
图1为折腰- 摆臂六轮车结构简图。图1(a)中:α1、α2、α3均为摆臂角度;β为前车体折腰角度;h为摆臂长度;h1为后车体质量块质心与前后车体铰接点的纵向距离;h2为后车体质量块质心与后车体间的垂向距离;l1为车体尾部与摆臂5和后车体铰接点间的距离;l2为摆臂5和后车体铰接点与摆臂3和后车体铰接点间的距离;l3、l4、l5、l6分别为前/后车体铰接点与摆臂3和后车体铰接点间的距离、前/后车体铰接连接件的长度、摆臂1和前车体铰接点与前/后车体铰接链接件前铰接点的距离、摆臂1和车体铰接点与车体最前端的距离。图1(b)中:b为车体的半边宽度;b1为摆臂的横向长度;b2为摆臂质心到轮心的横向距离。该折腰- 摆臂六轮车的结构和原理为:该车体尺寸为3 840 mm×2 405 mm×1 920 mm;车体分为前、后2部分,用铰接装置和液压缸连接[7- 8],其中前车体通过液压缸活塞拉动实现折腰,后车体通过液压缸活塞前后拉动质量块调整整车质心;整车采用电力和液压混合传动,供电单元在后车体位置,六轮车摆臂时,液压系统通过液压马达减速机减速带动蜗轮,蜗杆,使摆臂摆动至合适位置;6个摆臂内分别装有带动车轮转动的电机,由供电单元给电机提供电能, 6个摆臂均可绕铰接点360°自由旋转(图2为右后摆臂360°旋转图)。
通过一系列的摆臂和液压缸的配合动作,折腰- 摆臂六轮车可通过某些垂直障碍与壕沟障碍,具有较强的越障能力和快速通过性(图3、4分别为越垂直障碍和越壕沟时的状态)。此外,该六轮车的折腰自由度及6个摆臂自由度[9]可对复杂非结构路面的越障发挥重要作用,使六轮车通过性显著提升。
2 六轮车质心位置计算
2.1 六轮车结构简化
在分析计算六轮车质心时,需要对其结构进行简化,见图1。假设车轮、摆臂、前车体、后车体、质量块等均为刚体,且各部件的质量分布均匀。设单个车轮的质量为m1,单个摆臂的质量为m2,前车体的质量为m3,后车体质量为m4,质量块质量为m5。
2.2 各部件坐标变换关系
图5为由车轮1、摆臂1、前车体、后车体、质量块5个部件建立的坐标系。分别以六轮车折腰铰接点质心m,前车体质心所在位置B1,后车体质心所在位置B2,质量块质心所在位置B3,车体与1、3、5摆臂的铰接点位置r1、r3、r5为原点建立坐标系,并依次命名为m、B1、B2、B3、r1、r3、r5坐标系。
由于前车体的折腰角度为β,则B1坐标系相对于m坐标系的位置矩阵为
(1)
r1坐标系相对于B1坐标系的位置矩阵为
(2)
将车轮1和摆臂1、车轮3和摆臂3、车轮5和摆臂5分别看作一个整体,则车轮1及摆臂1的质心位置C1在r1坐标系中的位置矢量为
(3)
B2坐标系相对于m坐标系的位置矩阵为
(4)
r3坐标系相对于B2坐标系的位置矩阵为
(5)
摆臂3和车轮3的质心位置C3在r3坐标系中的位置矢量为
(6)
摆臂5和车轮5的质心位置C5在r5坐标系中的位置矢量为
(7)
前车体的质心位置B1相对于m坐标系的位置矢量为
(8)
后车体的质心位置B2相对于m坐标系的位置矢量为
(9)
质量块的质心位置B3相对于m坐标系的位置矢量为
(10)
2.3 整车质心位置
为了计算出整车的质心位置,需要先计算出左右两侧车轮及摆臂、前车体、后车体、质量块相对于m坐标系的位置矢量。则车轮1和摆臂1在m坐标系中的位置矢量为
mrC1=mVB1·B1Tr1·r1rC1=(m1+m2)-1×
((m1+m2/2)hsin(α3-β)+(m1+m2)×
[(l5-l6)cosβ+l4+l5+l6]/2,
-(b+2b1+2b2)m1-(b+2b1+b2)m2,
-(m1+m2/2)hcos(α3-β)-(m1+m2)×
(l5-l6)sinβ/2,m1+m2)T;
(11)
车轮3和摆臂3在m坐标系中的位置矢量为
mrC3=mVB2·B2Tr3·r3rC3=(m1+m2)-1×
(12)
车轮5和摆臂5在m参考系中的位置矢量为
mrC5=mVB2·B2Tr5·r5rC5=(m1+m2)-1×
(13)
由于m参考系建立在车体的纵向对称面内,因此整车的位置矢量在y方向上数值为0,则整车的质心C位置矢量为
(14)
2l2-4l3]+(2m1+m2)h(sinα1+
sinα2+sin(α3-β))+m3(l4+l5+
l6)cosβ/2-m4(l1+l2+l3)/2-h1m5,0,
(2m1+m2)h(cos(α3-β)-cosα2-
cosα1)-(m1+m2)(l5-l6)sinβ+
m3(l4+l5+l6)sinβ/2+h2m5,M)T。
(15)
2.4 六轮车抗倾覆能力的判定
六轮车的抗倾覆能力可用静态稳定边界法衡量[10]。该方法是在重心投影法的基础上,将稳定区域重新定义为车辆车轮与地面接触点连接而成的凸多边形水平投影区域,当车辆质心水平投影处于该凸多边形的水平投影区域内时,便判定车辆是稳定的,其适用于不平坦地面上车辆稳定性度量。图6为六轮车车轮与地面形成的区域四边形ABCD,其抗倾覆能力判定为:当六轮车的整车重心在地面上投影点在四边形ABCD内时,六轮车处于稳定状态,不发生倾覆;反之,则发生倾覆。
3 质量块在不同位置的车轮受力
质量块的位置对整个六轮车的质心位置有直接影响,通过改变质量块位置可提升六轮车的抗倾覆能力和越障能力等。在六轮车的越障过程中,需要分析质量块在不同位置时车轮的受力情况。
3.1 水平路面行驶状态
在六轮车遇到垂直障碍之前,假定其在水平路面上匀速行驶,六轮车各部件视为刚体,选取六轮车右侧为研究对象,其受力示意图如图7所示。
在水平路面建立通用模型,假设车轮均与地面接触,车体保持水平状态,液压缸质量忽略不计。利用隔离法进行水平路面上受力分析,则由图7(a)可得
(16)
由图7(b)可得
(17)
式中:FZ为六轮车右侧在Z方向的合力;F1、F3、F5,f1、f3、f5,Tf1、Tf3、Tf5,M1、M3、M5分别为前、中、后车轮受到地面的支持力、地面的反向驱动力、阻力偶矩和驱动力矩;G为整车所受重力;g为重力加速度;M0为六轮车右侧总力矩;T2为摆臂5对车体的反向力;r为车轮半径;φ为动摩擦因数。
当车体在水平路面行驶时,六轮车的前、中、后摆臂角度α1=α2=α3=α。将式(16)、(17)联立,化简后可得
(18)
由式(18)可知:在水平路面行驶的状态下,φ值不变,且在某一时刻摆臂角度α固定,此时质量块向前移动(即h1减小),中、前轮受力均会增大,车轮与地面的摩擦力也会增大,这有助于提升其动力性能。结合式(15)可得:h1减小时,整车的质心沿纵向向前移动。
3.2 前轮越障状态
六轮车在水平路面上进行摆臂和折腰角度的调整,可为下一步整车的越障做准备。其中:摆臂摆动使重心降低,而使越障更为平稳;折腰使得六轮车能够越过大于轮胎直径的垂直障碍[11]。图8为六轮车前轮越障受力示意图。
由图8可得
(19)
由式(19)可知:1)当六轮车前轮越上障碍时,仅有折腰角度β发生了变化,此时的质量块前移(即h1减小),使得作用在中、前轮的力F3、F1增大,进而使前轮的摩擦力、牵引力增大,有助于六轮车越上垂直障碍;2) 当摆臂角度α2>α1时,中间轮离开地面(即F3=0),前、后轮着地,此时质量块向前移动,有助于车辆越障时保持稳定。
3.3 中间轮越障状态
当六轮车的前轮越上障碍后,中间摆臂和折腰机构的相互协调作用,使得中间轮与垂直障碍高度相同,从而使其能够越上障碍。图9为六轮车中间轮越障受力示意图。
假定此时折腰角度α1=α3=45°,α2=70°,后轮抬起,中间轮和前轮越上障碍。根据式(15),可得质心C位置矢量为
(20)
垂直障碍高度为700 mm,当质量块处于如图9所示初始位置时,有h1=1 500 mm,质量块纵向坐标x=-1 221 mm,质量块垂直方向的坐标z=24 mm,且|x|>h+l3,此时整车质心在障碍面投影位置位于前轮和中间轮构成的区域之外。由2.4中的判定条件可知:六轮车处于不稳定状态,易发生倾覆。
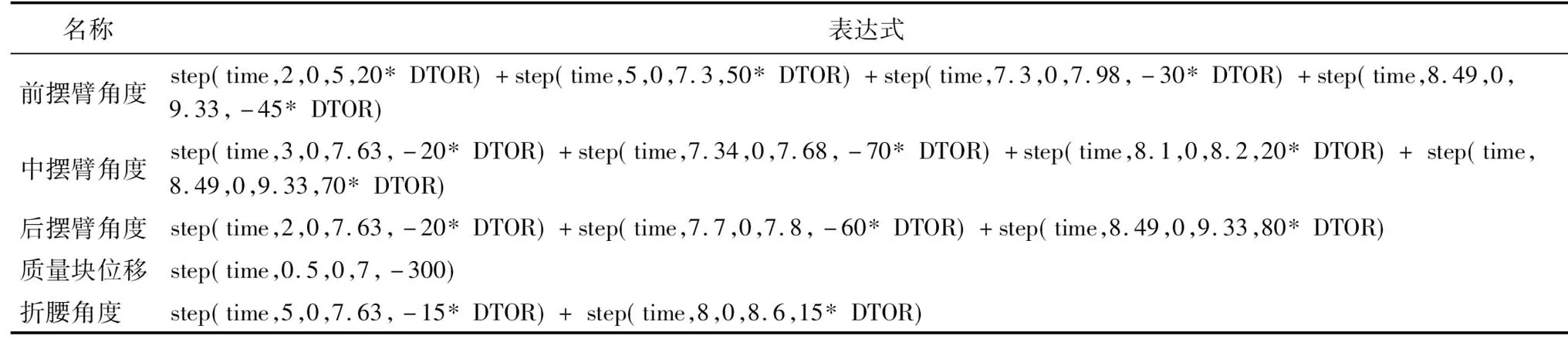
通过调整质量块的位置可避免发生倾覆。由于质量块向前移动的最大距离为540 mm,h1∈(960,1 500),则当h1=1 205 mm,|x|=h+l3时,六轮车处于临界状态,质量块移动距离为295 mm;当h1∈(960,1 205)时,|x| 为了确定理论分析的合理性,需要对其进行验证。由于六轮车本身结构尺寸和质量较大,对抗倾覆能力等性能验证存在一定的困难。因此,通过在RecurDyn软件中建立虚拟样机模型对六轮车越障过程进行仿真[12],分析质量块的位置对抗倾覆能力的影响,以节省成本、提高效率。 先在SolidWorks中构造折腰- 摆臂六轮车的三维模型图(导出为(*.x_t)格式),然后将其导入RecurDyn软件[13]中,构造出折腰- 摆臂六轮车仿真模型。约束条件为:1)将6个摆臂与车体分别用RevJoint相连,使摆臂可以绕铰接点进行旋转;2)将摆臂一端与车轮轮心用RevJoint相连,使车轮能够绕连接轴线旋转,从而驱动整车行驶;3)将后车体盛放质量块的框架与质量块之间用Fixed固定,框架与车体用Translate相连,框架可沿与车体的接触面纵向滑动,可实现质量块的前后移动,进而调节整车重心;4)液压缸活塞与缸体间添加Translate约束,液压缸活塞可沿其轴线伸缩;5)前/后车体铰接部位用RevJoint相连,实现前车体向上折腰动作;6)前车体上框架与前车体用Fixed固定。 在RecurDyn中建立“凸”字型垂直障碍路面模型,如图10所示。图中:A、B、C、D、E、F为参数化点,线段AB为水平路面,BCDE为垂直障碍,线段EF为水平路面,可通过改变各点在空间中的坐标来调节AB之间的距离、障碍面高度BC、障碍面长度CD等。 路面模型采用Outline Road(轮廓线路面)方式建立,该模型由一系列的空间三角形单元拼接而成,每块单元均具有独立记忆功能,能提供表征路面性能的各项参数(如剪应力、剪应变和最大沉陷量等),以便于计算路面所受的最大正压力和摩擦力;在车轴轴心位置添加车轮,选用Fiala轮胎模型,该模型将轮胎简化为具有弹性的圆环梁模型,且忽略轮胎的松弛效应及外倾角的影响;在创建轮胎力时,轮胎力作用点的方位角必须与轮胎几何中心点一致。在RecurDyn软件中,要建立正确的整车模型,在建立地面模型和轮胎模型时需要将重力方向调整为-Z,并在6个车轮处添加coupler约束,施加恒转矩,使仿真模型正常运转。图11为六轮车仿真模型。 4.2.1 车轮受力试验 基于六轮车仿真模型,对其添加约束和驱动。为使六轮车能越上垂直障碍,需要控制摆臂、折腰角度及质量块位置,各部件对应的step函数如表1所示。 表1 各部件对应的step函数 设定垂直障碍的高度为700 mm,在2~7.63 s进行前、中、后摆臂挥动,其中,中摆臂和后摆臂向后摆动角度为20°,前摆臂向前摆动70°,而折腰角度为20°,后车体质量块在0.5~7 s时向前移动的距离为540 mm。前轮受力如图12所示,可以看出:六轮车刚接触地面时受力不够稳定;在2.5~4 s时,前车体折腰使得前轮受力逐渐减小;当前轮离开地面时,前轮受力变为0。 中间轮受力如图13所示。可以看出:在质量块向前移动的过程中,中间轮在2.6~5 s时受力逐渐增大;随着前车体向上折腰,在5~7.6 s时受力缓慢减小。仿真结果与3.1中计算得到的结果一致。 4.2.2 抗倾覆能力试验 当六轮车在水平路面行驶时,车体不会发生倾覆。当越垂直障碍时,六轮车由于自由度较多,摆臂角度、折腰角度和整车重心位置变化较大,对六轮车越垂直障碍的稳定性有较大影响。具体为: 1) 当质量块位于初始位置时,六轮车不能顺利越过垂直障碍,发生倾覆; 2) 当质量块向前移动300 mm(即距离前极限位置240 mm)时,六轮车能够越上垂直障碍,未发生倾覆,如图14所示。 由以上仿真试验可知:当质量块移动的距离小于300 mm时,六轮车可能在越障时发生倾覆。经过多组试验分析得出:当质量块移动距离为286 mm时,六轮车处于临界稳定状态。与3.3中所得结果“当质量块移动距离为295 mm时,六轮车处于临界状态”相接近,验证了理论计算的合理性。 通过建立直角坐标系及进行各部件坐标系之间的变换,计算出六轮车的整车质心在空间中的坐标位置,分析了质量块位置对整车质心位置,中间轮、前轮的受力,以及抗倾覆能力的影响,同时验证了质量块位置的改变对中间轮和前轮的受力影响,以及理论计算的合理性。结果表明:当质量块向前移动距离大于一定值时,六轮车越障时不发生倾覆,为后续六轮车越障策略研究打下了基础。4 仿真验证
4.1 建立仿真模型
4.2 仿真试验
5 结论
