采用霍尔传感器的无刷直流电动机DTC系统研究
2018-09-05张兰红唐慧雨何坚强
张兰红,唐慧雨,2,何坚强,孙 星
(1.盐城工学院,盐城 224051;2.江苏大学,镇江 212013;3.江苏龙源风力发电有限公司,盐城 224100)
0 引 言
随着高性能永磁材料与电力电子技术的飞速发展,无刷直流电动机(以下简称BLDCM)兼具了交流电动机结构简单、可靠性高和有刷直流电动机调节性能与起动性能优良的优点,在汽车电子、家用电器与办公自动化等场合获得越来越广泛的应用[1-4]。随着应用范围的不断扩大,BLDCM产品的控制性能要求越来越高,为此许多优秀的控制技术被应用于BLDCM中,直接转矩控制(以下简称DTC)技术是其中的典型代表[5,6],实现DTC的关键是对转矩的观测与控制。文献[6]采用通过测量定子对地端电压、定子电流、中性点电压、电机转速来观测转矩,再用两点式调节器实现对转矩的控制,但转矩观测需用到电压、电流与转速等众多传感器,系统成本高,结构较复杂。文献[7]中DTC通过选择具有最优交轴分量的电压矢量来实现,但需根据连续的转子位置信息和速度信息观测出转矩。文献[8]采用了转矩滞环的单环控制,由转矩滞环输出与转子磁极位置决定下一时刻需要施加的电压矢量,但需采用较复杂的滑模观测器观测电机反电动势,进而估算转矩。文献[9]提出了滞环转矩控制和PWM控制相结合的考虑转矩脉动最小化的DTC方法,转矩观测通过随转子位置变化的线反电动势系数和工作相电流求取,该方法既需连续的转子位置信号,还需要通过离线实验获取线反电动势系数。上述转矩观测与控制基本都需要连续的转子位置信息,须借助于旋转变压器或光电编码器等高级位置传感器,但BLDCM中用得最多的传感器是简单价廉的霍尔位置传感器,该传感器只能提供离散的转子位置信号,如何针对霍尔位置传感器提供的离散信号进行BLDCM的DTC,使BLDCM在保持简洁特色的前提下,大幅提高其控制性能,目前这方面的研究较少,本文对此进行研究。
1 采用霍尔位置传感器的BLDCM-DTC
1.1 BLDCM数学模型
BLDCM等效电路如图1所示,包括逆变器和电机本体两部分,图中电机绕组为三相星型连接方式。

图1 BLDCM等效电路
若不考虑磁路饱和、铁耗和齿槽影响,BLDCM定子侧电压与电流方程分别如下:
ia+ib+ic=0
(2)
式中:u,i,e分别为定子相电压、电流和反电动势的瞬时值;R,L为定子每相电阻与自感;M为两相互感;下标a,b,c代表a,b,c三相。
BLDCM电磁转矩:
(3)
电机运动方程:
(4)
式中:Te为电机电磁转矩;TL为负载转矩;ω为机械角速度;J为转动惯量。
1.2 基于霍尔位置信号的转矩观测
DTC系统实现的关键是对转矩的准确观测。从能量传递角度出发,BLDCM的电磁转矩观测如式(3)所示[4],但由式(3)来观测转矩时,除需要检测电机至少两相电流外,还要获得反电动势形状函数。反电动势形状函数一般要根据连续的转子位置信息得到,霍尔位置传感器仅可以获得离散转子位置信息,在采用霍尔位置传感器的BLDCM中用式(3)来观测转矩显然不合适。
BLDCM控制使用两相导通方式,每一时刻总有一相是关断的,假设a相关断,b相和c相导通,则ib=-ic,根据式(3)有:
(5)
导通的两相反电动势幅值大小和转速成正比,方向相反,若设反电动势系数为Ke,则b相反电动势eb=Keω,c相反电动势ec=-Keω,将它们代入式(5)得:
Te=2Keib
(6)
式(6)表明,转矩可根据导通相电流计算得到,不考虑定子绕组电感影响的理想状态下,相电流幅值只有0、恒定正和恒定负3个状态,霍尔位置信号有0和1两种状态,因此相电流与霍尔位置信号之间应该存在某种对应关系,可从相电流与霍尔位置信号之间的对应关系出发,对转矩进行观测。
三相反电动势统一表示:
ex=Keωfex(θ)x=a,b,c
(7)
式中:fex(θ)为三相反电动势形状函数,它与反电动势波形一致,最大幅值为1。式(3)的转矩计算公式可以表示:
Te=Ke[fea(θ)ia+feb(θ)ib+fec(θ)ic]
(8)
两相导通方式工作的BLDCM,当某一相导通时,其反电动势及电流均为恒定值,当某一相关断时,该相反电动势呈线性上升或下降状态,电流为0,相反电动势和相电流形状函数的对应关系如图2中(a)~(c)所示,其中的fex和fix分别是反电动势及相电流形状函数,相电流形状函数定义为波形和相电流一致,最大幅值1的函数。横坐标θ为转子N极磁场轴线相对于a相绕组轴线的角度。
式(8)中的反电动势形状函数fex(θ)可以用与相电流有关的形状函数fix(θ)代替,则式(8)可以改写:
Te=Ke[fia(θ)ia+fib(θ)ib+fic(θ)ic]
(9)
由式(9)可知,根据霍尔位置信号计算电磁转矩的关键是找到相电流形状函数和霍尔位置信号之间的函数关系。
BLDCM采用3个锁存型霍尔位置传感器(Ha,Hb,Hc)在定子上等间隔120°电角度安装,Ha超前a相绕组轴线180°电角度安装,Hb,Hc依次逆时针转过120°电角度安装。霍尔位置信号和转子磁场位置的对应关系,如图2中(d)~(f)所示。当转子永磁体N极靠近霍尔传感器时,霍尔传感器输出高电平并保持,直到S极靠近后输出变为低电平。转子磁场旋转360°电角度,霍尔位置信号循环一次,3个传感器共输出6组位置信号,每组信号表示磁极转动60°电角度。电机运转时,霍尔位置信号的占空比是50%,即逻辑1和0都为180°电角度。

图2 反电动势及相电流形状函数与霍尔信号的对应关系
根据图2列出相电流形状函数和霍尔位置信号的对应关系,如表1所示。

表1 相电流形状函数和霍尔位置信号的对应关系
由表1推出相电流形状函数和霍尔位置信号的对应关系:
(10)

1.3 电压矢量及DTC的开关表
将开关状态用数字量表示,1代表开关管导通,0代表开关管关断,两相导通的BLDCM逆变器共有6个通电状态和1个全关断状态。计算6个通电状态下导通相电压矢量,得到如表2所示的结果。

表2 BLDCM导通相电压矢量
图3为导通相电压矢量分布,以导通相电压矢量为界,电压矢量平面可以被划分为Ⅰ~Ⅵ 6个扇区。由图2可知,在Ⅰ扇区,绕组通电状态为b+c-,此时所发矢量为V2(001001),设电机逆时针旋转,因此图3中扇区Ⅰ应定义在滞后V2(001001)60°~120°的区域。

图3 导通相电压矢量分布图
全关断状态电压矢量V0(000000)相当于在全关断状态之前所发矢量的反矢量,也可以称为公共反矢量,发这个矢量可以使电磁转矩迅速减小[5]。
由于转子永磁体磁链幅值一定,定子磁链幅值由电磁转矩Te唯一决定[5],只要控制了电磁转矩,定子磁链幅值也得到了控制,因此BLDCM-DTC可以通过在不同扇区选择不同电压矢量,采用转矩单环控制实现。根据图3的电压矢量和扇区分布,建立最优导通相电压矢量选择表,如表3所示,τ表示转矩调节标志。若τ为1,则表示需要增加转矩,选择和电机转向一致的最优导通相电压矢量;若τ为0,则表示需要减小转矩,选择公共反矢量V0(000000)。

表3 BLDCM-DTC最优导通相电压矢量选择表
表3说明DTC在每个扇区选用2个电压矢量将转矩控制在一定变化范围内,而由图2可知,常规的两相导通方式控制的BLDCM,在某一个扇区只会发1个固定的矢量,如在扇区Ⅰ,只发V2(001001),一直保持a相断开,b相正向导通,c相负向导通的状态,未考虑转矩控制问题,其转矩和相电流的波动必定大于采用DTC的BLDCM。
2 BLDCM-DTC系统建模与仿真分析
2.1 仿真模型的建立
BLDCM-DTC系统整体MATLAB仿真模型如图4所示。其中三相逆变桥模型根据输入的直流母线电压,计算出电机三相电压ua,ub与uc,BLDCM模型以电机三相电压和转速作为输入激励,输出为三相电流,转矩观测模型根据霍尔位置信号和三相电流获得转矩观测值,在直接转矩控制器模型中根据转矩观测值Te与转矩给定值Teg的比较结果,发出最优导通相电压矢量,对转矩进行控制。

图4 BLDCM-DTC系统整体MATLAB仿真模型
BLDCM模型由电压方程模型和反电动势计算模型组成,电压方程模型根据式(1)建立,如图5所示。

图5 电压方程模型
BLDCM在较宽的转速变化范围内,反电动势幅值和电机转速成正比关系,设与转速n对应的反电动势系数为Kn,三相反电势计算仿真模型根据式(11)~(13)用m函数实现,仿真模型如图6所示。
(11)

(12)
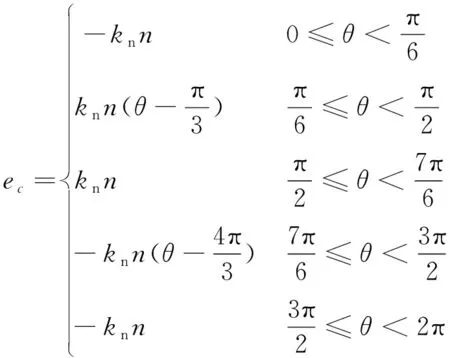
(13)

图6 三相反电动势计算仿真模型
电机转子转过的角度θ根据转速n得到,计算公式如下:
(14)
转速计算和转子位置判断模型结构如图7所示,其中转速n通过式(4)的运动方程计算得到。

图7 转速计算和转子位置判断模型
霍尔位置信号模型是一个MATLAB Function模型,根据转子转过的角度θ计算输出霍尔位置信号,其功能用m函数实现。
转矩观测模型也是一个MATLAB Function模型,通过m函数实现,根据电机三相电流ia,ib,ic和霍尔位置信号,按照式(9)和式(10)计算得到电机的观测转矩。
DTC开关表采用m函数实现,图8为直接转矩控制器模型的内部结构。
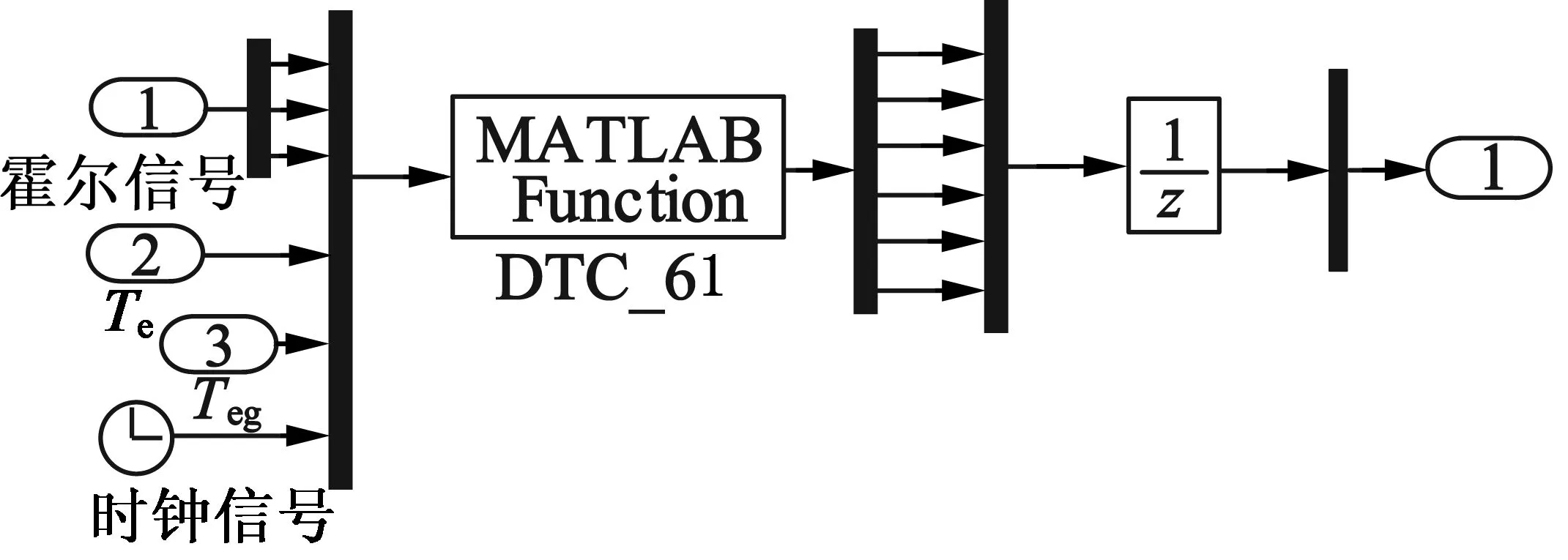
图8 直接转矩控制器模型内部结构
2.2 仿真结果分析
利用上节建立的仿真模型对BLDCM-DTC系统进行了仿真分析,仿真及下文实验所用电机参数均如表4所示。

表4 BLDCM参数
3个霍尔位置传感器间隔120°电角度安装,霍尔信号循环一次,3个传感器输出6组不同的位置信号,每组信号表示磁极转动60°电角度。
绕组相电流和霍尔传感器位置信号的仿真波形如图9所示。以其中的Ⅴ区为例,此时霍尔位置信号HaHbHc为110,a相电流为正,b相电流为负,c相电流为0,导通相电流为a+b-。同理可分析其他5组霍尔位置信号与绕组相电流关系。图9相电流形状与霍尔位置信号的关系与图2一致,仿真结果说明根据式(10)的关系求得相电流形状函数,再进一步根据式(9)求出转矩观测值。

图9 相电流与霍尔位置信号对应关系仿真波形
电机从空载起动再到负载运行的转矩与转速仿真波形如图10所示。电机转速上升到额定转速400 r/min后,在0.2 s时突加1 N·m的负载,在0.4 s时

(a) 转矩波形

(b)转速波形图10 电机转矩与转速仿真波形
突卸1 N·m负载,突加、突卸负载时转矩的响应时间均小于3 ms,转矩几乎无超调,稳态运行时转矩波动范围为0.02 N·m,说明系统运行平稳。
3 实验及分析
搭建了采用霍尔位置传感器的BLDCM-DTC实验系统,其结构如图11所示,系统由BLDCM、霍尔位置传感器、三相PWM逆变器和数字信号处理器DSP控制系统组成。

图11 BLDCM-DTC实验系统结构框图

对BLDCM-DTC系统的霍尔位置信号与绕组相电流关系进行了实验测试,结果如图12(a)所示,图中相电流形状与霍尔位置信号的对应关系与图2、图9一致,说明可以根据霍尔位置信号求得相电流形状函数,从而求出转矩观测值。需要说明的是与图2、图9相比,图12(a)中ia,ib2个电流波形正、负平顶部分并不是很平,而是存在着波动,这是由于换流过程中导通相电流换流速度不一致造成的;另外因为实验所用电机电感较小,且控制周期(50 μs)相对较大,所以相电流脉动幅值较大。而仿真由于采用了理想状态,并不存在这样的现象。
BLDCM满载运行在额定转速时,电机转矩波形如图12(b)所示,转矩脉动范围为0.1 N·m,脉动较小,电机稳态运行性能好。电机在额定转速从空载变为额定负载时,转矩动态响应波形如图12(c)所示,转矩的动态响应时间小于3 ms,电机的动态性能优良。

(a) 相电流与霍尔位置信号对应关系

(b) 满载转矩波形

(c) 从空载到满载转矩动态响应
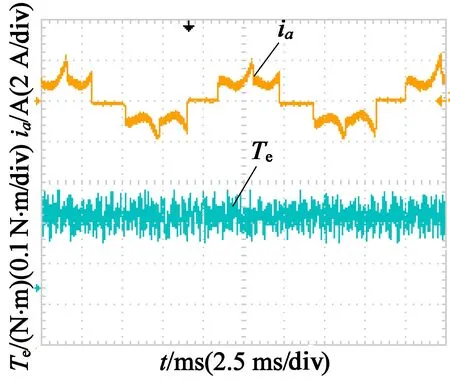
(d)采用常规两相导通控制的 BLDCM相电流与转矩波形

(e) 采用DTC的BLDCM相电流与转矩波形图12 实验结果
采用常规两相导通方式控制和DTC的BLDCM相电流和转矩波形分别如图12(d)和图12(e)所示。由于常规两相导通控制方式每个扇区只发一个固定电压矢量,而DTC可根据转矩控制需要灵活选择所发电压矢量,因此图12(e)的DTC相电流和转矩波动幅度明显小于图12(d)的常规两相导通控制方式,BLDCM-DTC的运行性能得到提高。
4 结 语
为在采用简单价廉的霍尔位置传感器的BLDCM中实现DTC技术,本文提出了根据霍尔位置信号进行转矩观测的方法,分析了BLDCM的电压矢量特点,建立了实现DTC的电压矢量选择表。利用MATLAB软件建立了BLDCM-DTC系统的仿真模型,介绍了电机模型、转矩观测模型等关键模型的建立过程,搭建了BLDCM-DTC系统实验平台,用仿真和实验分别测试了BLDCM-DTC系统的运行性能。仿真和实验结果表明,本文的根据霍尔位置信号进行转矩观测的方法可行,实现了BLDCM-DTC系统动、静态运行良好。本文的研究可为高性能BLDCM-DTC系统的研发提供技术借鉴。
