无刷直流电动机无位置传感器闭环控制研究
2018-09-05张劲恒
张劲恒,杨 扬
(南昌理工学院,南昌 330044)
0 引 言
无刷直流电动机具有结构本身相对简单、控制系统设计方便、运行稳定、维护成本低、功率密度高、调速性好等优点,已经在伺服控制、精密电子、办公自动化、医疗器械、家用电器、电动车辆、航天航空、工业工控等行业内得到了广泛的应用[1-8]。传统的无刷直流电动机需要安装位置传感器,从而得到转子位置信号对三相绕组进行换相控制。然而位置传感器的安装不但增加了系统自身的尺寸,使内部结构变得复杂,同时增加了成本,特别在高温、高湿等恶劣的工作环境下,传感器信号线容易受外界信号干扰,系统可靠性降低。因此,无刷直流电动机无位置传感器闭环控制是目前研究的热点,并成为控制系统的一个重要发展方向。
迄今为止,国内外学者对无刷直流电动机的无位置传感器控制技术展开了大量的研究,其控制技术主要包含反电动势法、三次谐波法、续流二极管法、磁链法、电感法[9]、状态观测器法[10]、端电压法[11]以及智能控制策略[15-17]等。文献[1]采用三次谐波检测转子位置,提出了基于软件实现数字锁相功能,并且对换相时刻进行估计, 去除了传统的硬件积分方法。这种方法受滤波器性能影响较大,由于信号采集及数字滤波的延时会造成切换点时刻估计偏差。在参考文献中,反电动势法是实际应用中一种较为常用的检测方法,该方法基于测量三相绕组端电压, 实时检测三相绕组反电动势的过零点时刻,从而得到离散的换相信号。文献[2]基于三相绕组断开相的端电压与变流器直流母线中间点电压之间的关系,检测到三相绕组的反电动势过零点时刻,从而得到转子位置旋转信息。该方法对于全压型及上、下桥臂PWM调制策略适用,对于H_PMW_L_ON,H_ON_L_PWM,开通相PWM保持相恒通,开通相恒通保持相PWM不适用。文献[14] 基于扩展卡尔曼滤波原理对三相绕组的反电动势进行相应检测,该方法运算相对复杂,对控制系统运算速度提出了较高的要求,提升了控制系统的成本。
本文首先系统阐述了无刷直流电动机的基本原理和工作特性,比较分析了无刷直流电动机不同控制策略下的数学模型及拓扑结构,研究了一种基于逆变器直流环中点电压为参考点,利用线电压来实时计算相反电动势的转子位置辨识方法。基于此方法,采用预定位-外同步-自同步三段式起动,实现无刷直流电动机无位置传感器闭环稳定控制,并对控制策略进行仿真,从而验证理论分析的正确性。
1 无刷直流电动机电路拓扑及数学模型
三相全桥式无刷直流电动机主电路拓扑结构框图如图1所示。其三相绕组为Y型接法,假设三相绕组的反电动势波形为梯形波,三相绕组的电流波形为方波。为了达到最大的电磁转矩输出目的,三相绕组的电流需要与对应自身相的绕组反电动势保持相位一致。变流器采用120°两两导通的控制方式,开关器件每60°电角度更换一次,一个周期内需要6次换相信号。反电动势及电流波形如图 2所示,三相绕组的反电动势过零点都领先对应相绕组的换相信号30°电角度。

图1 无刷直流电动机驱动电路拓扑原理图

图2 反电动势、电流波形
假设无刷直流电动机的绕组是三相对称的,并忽略电机的齿槽效应和电枢反应,气隙磁场空间分布为梯形波,三相绕组的电压方程式可以表示:
(1)
式中:uaN,ubN,ucN分别为三相绕组的相电压;R为每相绕组的电阻;ia,ib,ic分别为每相绕组的电流;ψa,ψb,ψc分别为三相绕组的磁链。
式(1)中,三相绕组的磁链表达式如下:
(2)
式中:ψar,ψbr,ψcr分别为永磁体在三相绕组感应产生的磁链;M为三相绕组之间的互感;L为三相绕组自身的电感。
因假设绕组是三相对称的,所以三相绕组的电流存在如下关系:
ia+ib+ic=0
(3)
将式(3)代入式(2)得:
(4)
将式(4)代入式(1)得:
(5)

(6)
以直流母线中点m的电势为参考点,因此电机三相绕组电压的数学模型如下:
(7)
式中,uam,ubm,ucm为定子a相,b相,c相绕组相对直流环中点的电压;uNm为电机中性点对直流环中点的电压。
电机输出的电磁有功功率:
Pe=eaia+ebib+ecic
(8)
电机输出的电磁转矩:
(9)
式中:ωr为转子机械角速度。
2 无刷直流电动机相反电动势检测方法
本文研究了一种新的反电动势检测方法,该方法以逆变器直流环中点电压为参考点,利用线电压来实时计算相反电动势的转子位置进行辨识。此方法不需要构造电机中点或虚拟中性点,通过直接检测无刷直流电动机三相绕组与直流环中点之间的电压,经过软件实时计算,可以得到三相绕组反电动势过零点时刻,进而可以得到每个周期内6个换相时刻切换点。
基于三相相绕组电压表达式(7),通过两两相减可以得到三相线电压表达式如下:
(10)
为了进一步推导相感应电动势与线电压之间的关系,将其中两相线电压进一步进行相减,以ubc,uca两相为例说明如下:
(ea+eb-2ec)
(11)
假设处于a相,b相导通,c相不导通时刻,ea+eb=0,电机三相电流之和ia+ib+ic=0,则式(11)可以简化:
(12)
又由于上面假设为c相不导通时刻,所以ic=0,对式(12)进一步简化得:
(13)
通过式(13)可以看出,在c相不导通时刻,其反电动势只与线电压有关系。同理可得ea,eb两相在不导通时刻非换相期间的表达式如下:
(14)
因此可以根据检测线电压值,就可以得到三相绕组反电动势过零点时刻,进而可以确定每个周期内6个换相时刻切换点。
3 基于线电压计算相反电动势仿真验证
下面分别给出基于断开相绕组端与直流中点之间电压、线电压来实时计算的相反电动势、绕组电流仿真波形,以a相为例。图3为不同调制方式下的仿真波形图,图3(a)为上、下桥臂PWM调制策略,图3(b)为全压型调制策略,图3(c)为H_PMW_L_ON调制策略,图3(d)为H_ON_L_PWM调制策略,图3(e)为开通相PWM保持相恒通调制策略,图3(f)为开通相恒通保持相PWM调制策略。从仿真结果中可以看出,图3(a)的上、下桥臂PWM调制及图3(b)的全压型调制策略的断开相绕组端与直流中点之间电压存在明显的过零点,可以用于换相信号控制;其它4种调制策略的断开相绕组端与直流中点之间电压并不是连续波形,是一种断变式电压波形,在软件或硬件中较难处理,如果基于低通滤波又会产生较大相位延时。然而在这6种不同的调制策略中,基于式(13)、式(14)由线电压来实时计算的相反电动势在断开相绕组存在连续的过零点,便于换相信号控制。

(a) 上、下桥臂PWM调制

(b) 全压型调制

(c) H_PMW_L_ON调制

(d) H_ON_L_PMW调制

(e) 开通相PWM保持相恒通

(f) 开通相恒通保持相PWM图3 相电流、端电压及相反电动势波形
4 无刷直流电动机闭环控制策略系统仿真
要实现无刷直流电动机闭环控制策略,首先需要解决电机稳定起动,目前现有的研究文献通常采用三段式闭环起动方法。三段式闭环起动方法主要分3个过程:第一阶段为转子预定位控制;第二阶段为V/f恒定比同步加速控制;第三阶段为自同步运转闭环控制。本文同样采用三段式起动策略。系统中电机参数定子电阻R=11.9 Ω,定子绕组自感L=2.07mH,定子绕组互感M=0.69mH,当速度为1 000 r/min时,电机空载时永磁产生的线电压峰值VPK=32.3 V,电机极数p=4,电机转动惯量J=0.000 031 kg·m2,直流母线电压udc=100 V,导通方式为两两120°导通。
转子预定位采用b相上管、a和c相下管同时导通,持续时间为0.1 s,转子受力产生旋转,将使转子磁场轴线与b相绕组中心轴对齐。外同步加速原理是电机定子绕组频率fs从零以400 Hz/s的增加梯度上升,同步角频率ωs积分得到同步电角度θ,每个周期开关切换时刻根据电角度θ确定,具体切换时刻如图4所示,这个区间持续时间为0.2 s。

图4 外同步加速开环切换时刻
自同步运转基于本文前面提出的基于逆变器直流环中点电压为参考点,利用线电压来实时计算相反电动势的转子位置辨识方法得到切换时刻,这个区间仿真时间为0.2 s,系统整个仿真时长为0.5 s。图5为H_PMW_L_ON调制策略无刷直流电动机无位置传感器起动及闭环控制系统仿真结果。

(a) 电机转速、三相 电流波形

(b) 图5(a)水平坐标X轴 方向局部放大图

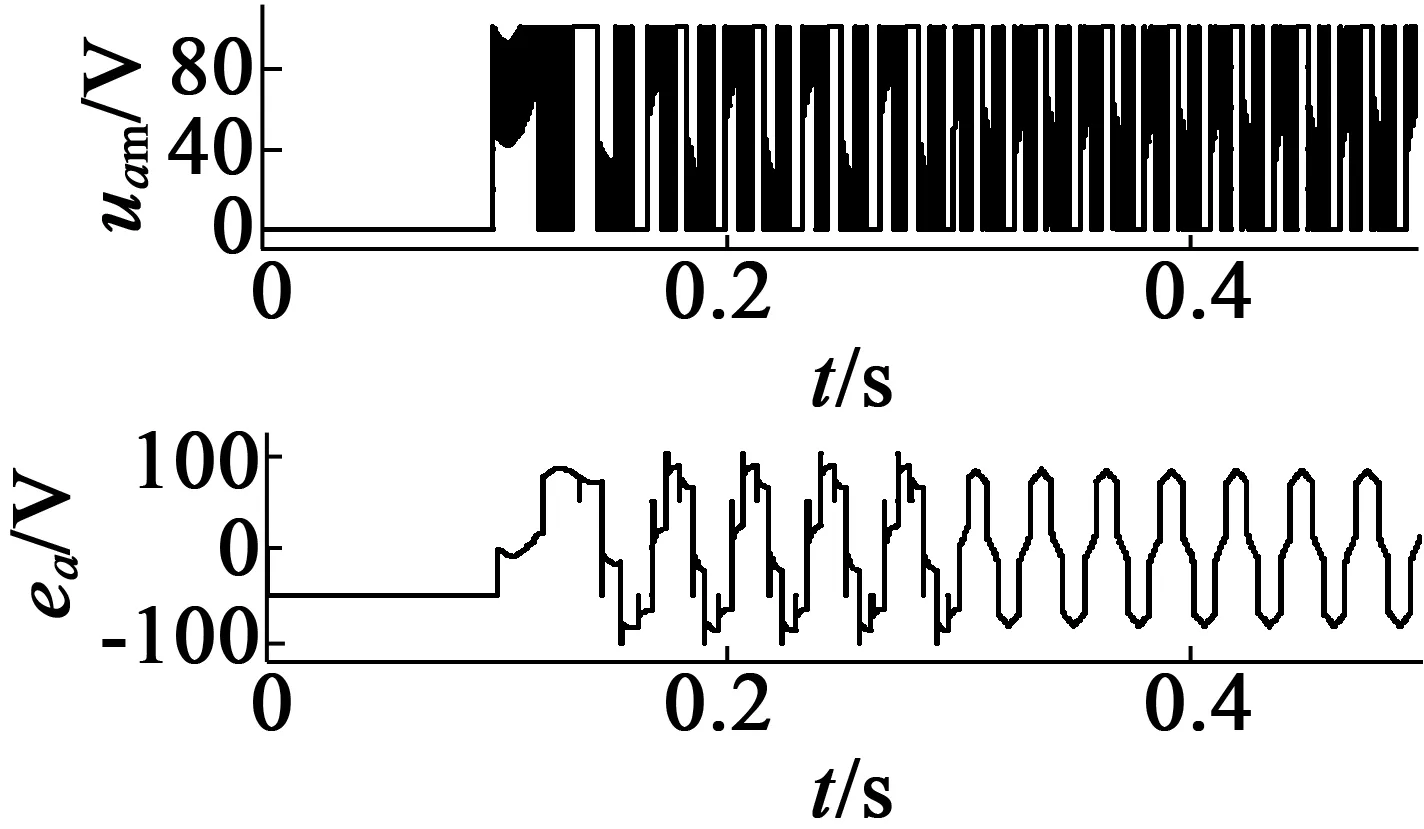
(c) 电压uam,a相绕组 反电动势ea波形

(d) 图5(c)水平坐标X轴 方向局部放大图
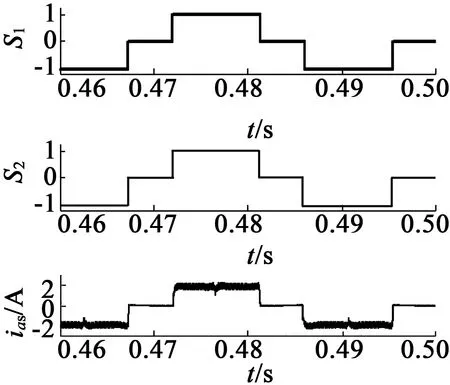
(e) 电机a相实际霍尔信号S1, 估算换相信号S2,a相绕组电流波形图5 H_PMW_L_ON调制策略闭环控制仿真
图6为开通相PWM保持相恒通调制策略无刷直流电动机无位置传感器起动及闭环控制系统仿真结果。
从仿真波形中可以看出,从外同步加速切换到自同步运转相对平滑,没有出现电流明显过冲现象,说明本文采用预定位-外同步-自同步三段式起动方法可以实现无刷直流电动机无位置传感器稳定起动。利用线电压来实时计算相反电动势的转子位置辨识方法估算的换相信号与实际霍尔信号几乎完全一致,验证了本文研究的绕组反电动势检测方法的正确性。由于本文只给出了H_PMW_L_ON、开通相PWM保持相恒通调制策略的仿真波形,其余4种调制同样可以实现稳定起动及闭环控制,结果相类似。

(a) 电机转速、三相 电流波形

(b) 图6(a)水平坐标X轴 方向局部放大图
(c) 电压uam,a相绕组 反电动势ea波形

(d) 图6(c)水平坐标X轴 方向局部放大图

(e) 电机a相实际霍尔信号S1, 估算换相信号S2,a相绕组电流波形图6 开通相PWM保持相恒通调制策略闭环控制仿真
5 结 语
本文研究了一种基于逆变器直流环中点电压为参考点,利用线电压来实时计算相反电动势的转子位置辨识方法,给出了全压型及5种PWM调制模式下的相电压反电动势波形。起动过程采用预定位-外同步-自同步三段式起动方法,可以实现无刷直流电动机无位置传感器稳定闭环起动,外同步加速切换到自同步运转过程相对平稳,没有出现电流振荡,仿真波形验证了无位置传感器闭环控制系统的可行性及有效性。
