机械臂轨迹跟踪云模型控制器设计
2018-08-25付誉,李众
付 誉,李 众
(江苏科技大学电子信息学院,江苏镇江212003)
随着工业的快速发展,机械臂在我国机械、制造等行业已是必需的设备。而在实际应用中机械臂轨迹的微小偏差就很有可能损害到机械臂本身,甚至是对外界的人或者环境带来极大的破坏。因此使机械臂轨迹能够快速、准确地跟踪上期望轨迹已成为我们的研究目的[1]。目前国内外很多学者对机械臂轨迹跟踪控制问题进行了全面的研究,文献[2]利用并联模糊推理设计了机械手控制力矩控制器,该方法虽然鲁棒性强且对动态系统不确定性问题进行了补偿,但模糊规则的建立则是相当麻烦,在控制过程中控制规则等不能作修改,控制的自适应能力有限。文献[3]提出了两种基于神经网络的机器人鲁棒控制算法。鲁棒控制虽然不需有精确的过程模型作为基础控制系统的鲁棒稳定性也能保证。但是一般假设系统的过程动态特性以及它的变化范围,具有一定的局限性。文献[4-5]针对具有外部干扰和重复性任务的机器臂的轨迹跟踪问题,提出了迭代学习控制相关的控制方法。系统的收敛速度得到了提高,但迭代学习比较复杂且实现周期长。文献[6]将经典滑模控制器转化为具有简单规则库的模糊滑模控制器来实现机械臂的最佳轨迹跟踪,并进行了仿真研究。当被控对象进入滑模面后,滑模变结构控制对外界的干扰和参数变化具备某种不变性且响应快速,明显比其他控制系统鲁棒性要强,但其所产生抖振问题是难以避免的。
云模型在实现复杂非线性系统的控制中,不需要有精确的控制对象数学模型,还能够使环境中各种未知的不确定性因素得到保留,具有强大的非线性处理能力和工程实用性[7-8]。由于机械臂系统是一个高度耦合、多输入多输出的复杂非线性系统,外部扰动大,且又要求较高的跟踪精度,其运动的数学模型非常复杂且不易建立,对机械臂的轨迹跟踪是一个比较困难的控制问题[9]。为了提高智能控制对参数变化的鲁棒性等问题,有学者提出了使用传统建模方式为基础的经典控制理论和现代控制理论相结合的方法,但是这种方法很难设计出适当的控制器且虽然提高了对参数的鲁棒性,但是只在稳态时效果更佳且响应速度较慢。
因此,本文将要研究一种高精度且对不确定非线性因素具有较强适应性的云模型控制方法。提出了一种基于一维云模型的机械臂轨迹跟踪控制器设计。目的在于解决机械臂存在的死区、未知负载等非线性因素的影响下轨迹跟踪控制问题,提高轨迹跟踪控制系统的操作性能,使机械臂能够快速、精确地沿着目标轨迹运行。
1 机械臂轨迹跟踪系统的数学模型
1.1 机械臂的坐标系建立
由图1可知,它由质量分别为为m1,m2的连杆L1,L2构成。电机给出的驱动力矩τ1、τ2分别驱动连杆L1、L2,底座、L1、L2之间过旋转关节连接。坐标系Χ1Υ1Ζ1和Χ2Υ2Ζ2分别固定在两个连杆上。而操作空间则用坐标系ΧΥΖ表示,其原点及Ζ轴与Χ1Υ1Ζ1重合。用l1,l2来表示连杆的臂长,质心距连杆接点长度为长度为r1和r2。
1.2 机械臂的数学模型
n自由度机械臂的动态过程如下数学模型描述为:

式中q∈Rn为关节位置坐标向量,M(q)∈Rn×n为机器人的惯性矩阵,C(q,̇)∈Rn表示离心力和哥氏力,G(q)∈Rn重力项,F(̇)∈Rn表示摩擦力矩,τ∈Rn为控制力矩,τd∈Rn为外加扰动,具体包括建模误差,参数变化及其他不确定因素[10]。
采用层次回归分析法进一步探索社会认知两大基本维度对中庸思维各因子独特成分的解释作用。在第一层回归纳入非因变量的中庸思维因子,第二层纳入能动性与社群性。结果发现(表3),社群性依旧对多方思考、和谐性有预测作用,对整合性的预测变为不显著。
其动力学模型如图2所示。

图1 二自由度机械臂示意图

图2 机械臂的动力学模型
2 云模型控制器设计
2.1 云模型概念
云模型是表示定性概念与定量表示之间不确定性转换过程的模型,数字特征用均值(Ex),熵(En)和超熵(He)3个数值来表示[11-12]。设U是一个精确数值表示的集合U={x},称为论域,T为U中的模糊集合,对于任意元素x∈U都存在一个有稳定倾向的随机数,叫做x对T的隶属度μ(x),μ(x)是U到闭区间[0,1]的映射。则称μ(x)在论域U上的分布称为云模型[13]。
2.2 云模型不确定性推理
云模型控制器将实现偏差到控制输出的映射。根据已知的各种条件在某些环境下一步步推导得到目标规则的过程叫做云模型的不确定规则推理。云规则发生器一般由X条件云发生器和Y条件云发生器两部分组成,即规则前件和规则后件[14]。
一维X条件云模型:

一维Y条件云模型:

式中(Ex,En,He)为X条件发生器的一维云模型数字特征;(Ey,En,He)为Y条件发生器的云模型数字特征;Ex为期望值;En为熵;He为超熵。μ为X条件云的输出。
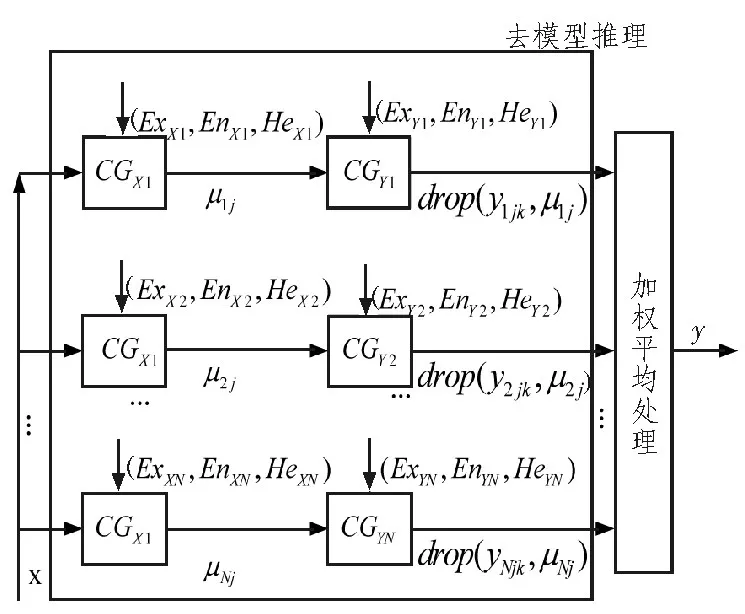
图3 一维云模型映射器
如图3所示,它可以反映N条推理规则:IFXiTHENYi,i=1,2,…,N。 当偏差输 入x多次 刺激不同规则的前件部分CGX1~CGXN,会产生μNj值,然后μNj值再刺激对应的规则后件CGY1~CGYN,会输出一组云滴drop(yNjk,μNj),通过计算云滴加权平均值,即输入x到定量输出y的映射[15-16]。
2.3 一维云模型轨迹跟踪控制器设计
根据以上对一维云模型的描述,构造出机械臂轨迹跟踪控制系统框图如图4所示。

图4 轨迹跟踪云模型控制器结构图
云模型的特征参数设置如表1所示。

表1 规则发生器参数表
3 系统仿真
3.1 本文仿真控制对象的参数
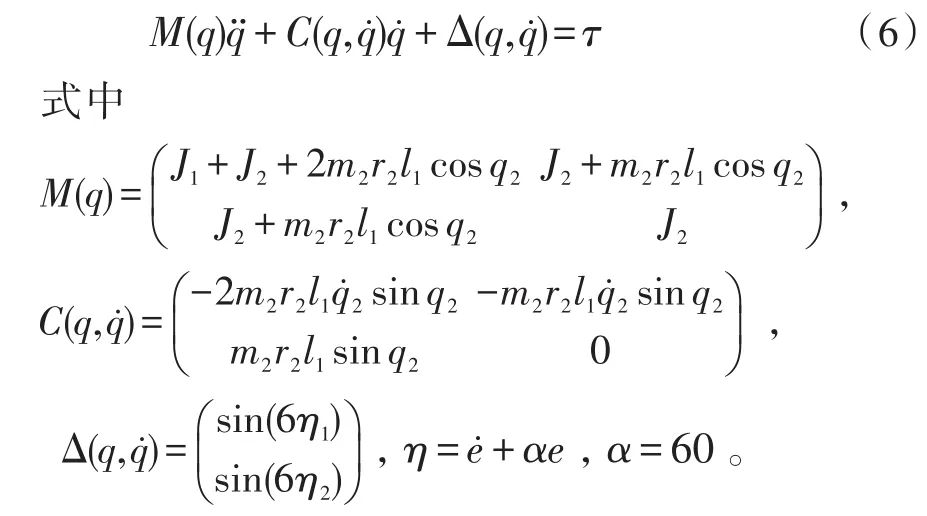
为了验证云模型控制方法的可行性及有异性,选取二自由度机械臂为被控对象进行Matlab仿真[17],通过分析图2以及对机械臂系统动能、转动惯量等计算[18],可以得到本文的机械臂在平面上运动的动力学模型:
机械臂的各项参数的物理含义如表2所示。

表2 二自由度机械臂的标称参数
设机械臂的操作平面用坐标x和y来表示,期望轨迹的坐标如表3所示。
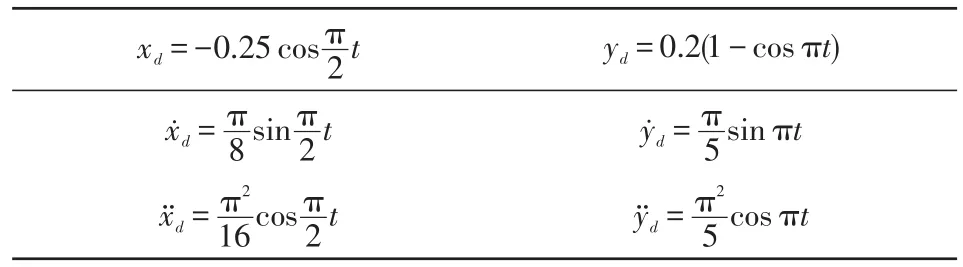
表3 期望轨迹的坐标
机械臂末端初始位置通过s函数设置,为,理想轨迹的初始位置为,仿真时间设为2 s。
3.2 仿真结果与分析
由图5~8可以看出在云模型控制下关节1、2的位置误差在0.2 s内就能趋于稳定,调节速度快且无较大波动。由图9、10可以明显的看到在云模型控制下的机械臂末端能够准确地跟踪目标轨迹,跟踪精度也得到了明显的改善。因此云模型控制算法对于非线性因素带来的影响表现出了较强的适应性[19],保证了机械臂能够快速精确地跟踪目标轨迹。

图5 PID控制的关节一的位置及误差曲线

图6 PID控制的关节二的位置及误差曲线
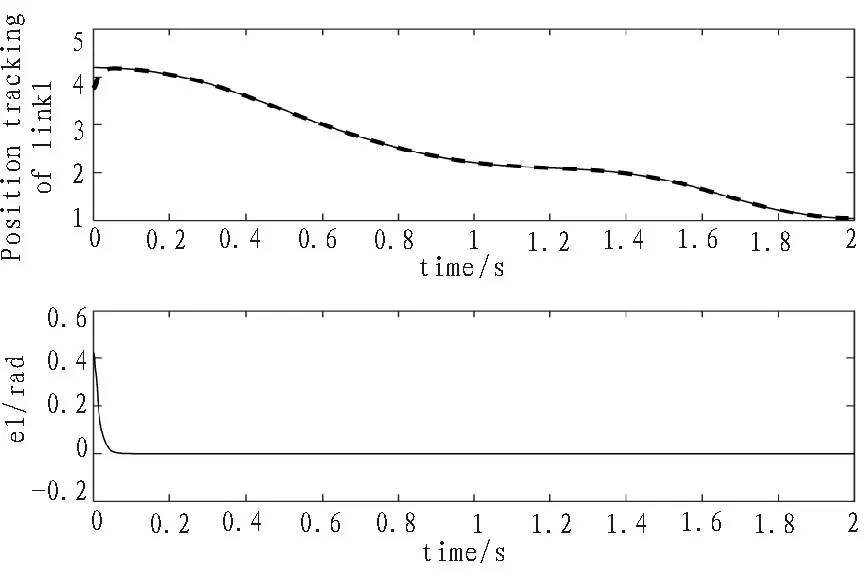
图7 云模型控制的关节一的位置及误差曲线

图8 云模型控制的关节二的位置及误差曲线

图9 PID控制的机械臂末端轨迹曲线

图10 一维云模型控制的机械臂末端轨迹曲线
4 结 论
机械臂轨迹跟踪控制一直以来是控制学领域研究的重点内容,它关系到工业发展的安全性和可靠性。本文在被控对象存在非线性因素的情况下,提出了基于一维云模型的轨迹跟踪控制设计方法[20],仿真结果显示云模型控制算法能够在不确定未知外界因素下能够快速精确地跟踪目标轨迹,适应性强,解决了机械臂轨迹跟踪系统在复杂工作环境中的控制问题,使得机械臂轨迹跟踪控制安全、持续、稳定运行,具有一定的实用价值。
