简析平面机构自由度的计算方法
2018-08-11金英达于晓文周三合沈阳工学院机械与运载学院
金英达 于晓文* 周三合 沈阳工学院机械与运载学院
1 平面机构自由度和约束的概念
1.1 平面机构的自由度
作平面运动的构件相对于定参考系所具有的独立运动的数目,称为构件的自由度。因此一个作平面运动的自由构件具有三个自由度。
1.2 约束
对非自由体的运动所加的限制称为约束。
构件之间组成运动副后,由于独立运动受到限制,因而其自由度便随之减少。每加上一个约束,构件便失去一个自由度。平面低副均引入2个约束,平面高副引入1个约束,且自由度减少的数目等于约束的数目。
2 平面机构自由度的计算公式
设平面机构中活动构件数目为 ,形成运动副之前共有3 个自由度。若机构中有个低副,则自由度减少个;若机构中有 个高副,则自由度减少个。因此,活动构件自由度总数,扣除因形成运动副而减少的自由度,剩下的自由度即为机构的自由度,以表示,即

这就是计算平面机构自由度的公式。由公式可知,机构自由度取决于活动的构件数目以及运动副的性质(低副或者高副)和个数。
3.计算平面机构自由度时应注意的几个问题
3.1 复合铰链:由两个以上构件在同一处构成的
重合转动副称为复合铰链。由 个构件汇聚而成的
图1所示压力机构的自由度计算为:


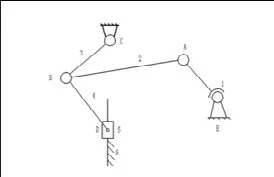
图1 压力机构运动简图
3.2 局部自由度:机构中与输出构件运动无关的自由度,称为局部自由度。
如图2所示平面滚子传动件盘形凸轮机构中,滚子绕其自身轴线的转动为机构的局部自由度,在计算机构的自由度时,应预先将转动副除去不计,或设想将滚子与从动件固联在一起作为一个构件来考虑。


则图2 凸轮机构运动简图
3.3 虚约束:这种重复对构件运动形成限制作用的约束或不起独立限制作用的约束称为虚约束。在计算机构自由度时,应从机构的约束数中减去虚约束数。
如图3所示的凸轮-连杆组合机构中,在B处
滚子与凸轮机构成高副,滚子引入一局部自由度,应除去;在F和F`两处,竖杆与机架组成导路平行的移动副,引入一虚约束,应除去。

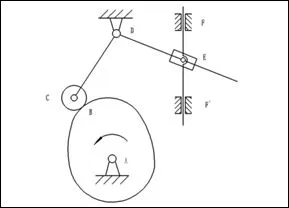
则图3 凸 轮-连杆机构运动简图
应当注意,虚约束对机构的几何条件要求较高,因此对机构的加工和装配提出了较高的要求,从机构的运动观点来看是多余的,但能增加机构的刚性,改善其受力状况,因而被广泛采用。
4 结论
当机构自由度按照上面方法计算完后,即可用此来判断机构的运动是否确定。机构的运动是否确定取决于其自由度数目以及它和原动件数目之间的关系。当自由度F>0时,自由度数与原动件数之间的关系有三种情况:
自由度数>原动件数时,机构的运动不能确定;
自由度数<原动件数时,机构将在薄弱环节被破坏;
自由度数=原动件数时,机构的运动完全确定。
综上所述,通过一个原动件输入一个运动规律,必然限制机构的一个运动自由度。因此,只有当F>0,且原动件数目等于自由度时,机构才能具有确定的相对运动。
