基于PLC的车载通信设备自动化控制系统设计
2018-07-27朱建芳
朱建芳
摘 要: 传统车载通信控制系统的抗干扰能力较差,控制准确率低下,限制了车载通信系统的应用。为此,文中开发基于PLC的车载通信设备自动化控制系统,其主要由自动化控制模块、PLC控制模块以及车载通信系统组成。PLC控制模块采用西门子公司的通用闭环控制模块,其可应用于快速闭环控制系统中,当插入不同的软件功能模块便可形成不同的控制结构;采用5层结构的DSRC进行数据接收与发送,提高了数据收发的稳定性。对控制系统进行可靠性和抗干扰试验,测试结果验证了系统的稳定性及可靠性。
关键词: 车载通信设备; PLC控制模块; 自动化控制; DSRC协议; 闭环控制; 抗干扰; 可靠性
中图分类号: TN915.05?34; TP393 文献标识码: A 文章编号: 1004?373X(2018)14?0034?03
Design of PLC?based automation control system for vehicle?mounted
communication equipment
ZHU Jianfang
(Guangzhou Maritime University, Guangzhou 510725, China)
Abstract: The traditional vehicle?mounted communication control system has poor anti?interference capability and low control accuracy, which limits the application of the vehicle?mounted communication system. Therefore, a PLC?based automation control system for vehicle?mounted communication equipment is developed in this paper. The system is mainly composed of the automation control module, PLC control module, and vehicle?mounted communication system. In the PLC control module, the general closed?loop control module of Siemens is adopted, which can be applied in the fast closed?loop control system. When a different software functional module is inserted, a different control structure is formed. A 5?layer structured DSRC is adopted to receive and send data, so as to improve the stability of data transmission and reception. A reliability and anti?interference test of the control system was performed, and the test results verified the stability and reliability of the system.
Keywords: vehicle?mounted communication equipment; PLC control module; automation control; DSRC protocol; closed?loop control; anti?interference; reliability
0 引 言
车载通信系统是汽车的核心模块,其担负着在高速行驶的汽车中实现交通高度信息化、智能化。车载通信系统通过车车、车路通信将交通参与者、交通工具及其环境有机结合,提高了交通系统的安全和效率[1?4]。为了发挥车载通信系统的作用,必须对其进行控制。传统车载通信控制系统的抗干扰能力较差,控制准确率低下,限制了车载通信系统的应用。为此,本文开发了基于PLC的车载通信设备自动化控制系统,并对其进行了可靠性与抗干扰试验,证明了设计的可行性和正确性。
1 车载通信自动化控制系统
本文所设计的车载通信设备自动化控制系统主要分为3个部分,即PLC自动化模块、PLC控制模块以及车载通信系统[5?6]。
1.1 自动化模块
PLC自动化模块主要由4个部分组成:中央处理单元(CPU)、输入接口部件、输出接口部件以及电源部。中央处理单元用于对整个PLC自动化模块进行控制;电源部件为PLC内部电路提供电源;输入接口部件用于连接进行指令输入的设备,其包括触控屏、按键等指令输入设备;输出接口部件用于连接接收自动化模块指令的设备,本文主要指车载通信设备。
1.2 PLC控制模块
本文PLC控制模块采用的是西门子公司的通用闭环控制模块,其可应用于快速闭环控制系统中,当插入不同的软件功能模块便可形成不同的控制结构。通常安装于PLC的I/O框架上,通过其自身的接口一方面与PLC的系统总线相连,另一方面与被控对象相连。在不占用PLC的CPU资源情况下,可并行管理8个闭环回路。通用闭环控制模块的硬件结构框图如图2所示。整个模块可分为两大部分,上部为处理器部分,下部为模拟与脉冲输入部分,两部分通过电缆相连。
1) 处理器部分。本模块是智能模块处理器部分,采用80186作微处理器,用来实现各种控制算法的计算及各个控制功能的实现。图中的总线接口用于与PLC的系统总线相连,并通过其与PLC的CPU进行信息交换。编程器接口与编程器相连,实现对模块的编程与监控。系统内尚有存储器子模块接口,存储子模块中包括16 kB EPROM和4 kB E2PROM。EPROM中存放与控制结构相应的系统软件,E2PROM中存放系统的结构数据。不同的控制结构需要不同的系统软件,由插入模块内不同的存储子模块内容来确定。
2) 模拟与脉冲输入部分。模拟部分包括:模拟量输入通道(A/D),输入通道数为8路、12位、输入信号范围为±10 V;模量输出通道(D/A),输出通道数亦为8路、12位,输出信号范围为±10 V,且有短路保护。另外,还有脉冲输入部分,计数范围为0~32 767,码盘电源电压5 V,最大输入频率为500 kHz。通过上述3个接口可与实际生产过程相连。
1.3 车载通信系统
车载通信系统包括车与路的通信以及车与车之间的通信,其由路侧单元(Road Said Unit,RSU)以及车载单元(On Board Unit,OBU)组成[7?8]。车载单元OBU负责采集车辆的信息,包括GPS定位信息、汽车油量、车辆状态信息等以及司机遇到紧急事件时所进行的操作记录的信息。再通过DSRC通信协议将采集的信息发送至路侧单元RSU,路侧单元RSU再将信息通过以太网发送至PLC控制中心进行车载通信控制。车载单元OBU的电路结构如图3所示。
本文车载通信系统的数据收发采用DSRC通信协议,其协议层次如图4所示。主要分为5层,分别为L1物理层、L2数据链层、L3网络层、L4传输层以及L7应用层[9]。其中,数据链层由LLC子层以及MAC子层构成。物理层与MAC子层下部分采用IEEE 802.11p协议,MAC子层上部分采用IEEE 1609.4 WAVE多信道运行协议,其定义了一种MAC增强机制,为系统提供了多信道协作功能。LLC子层及传输层采用IEEE 1609.3 WAVE网络服务协议,其确定了系统网络传输形式,实现系统与目前网络的融合。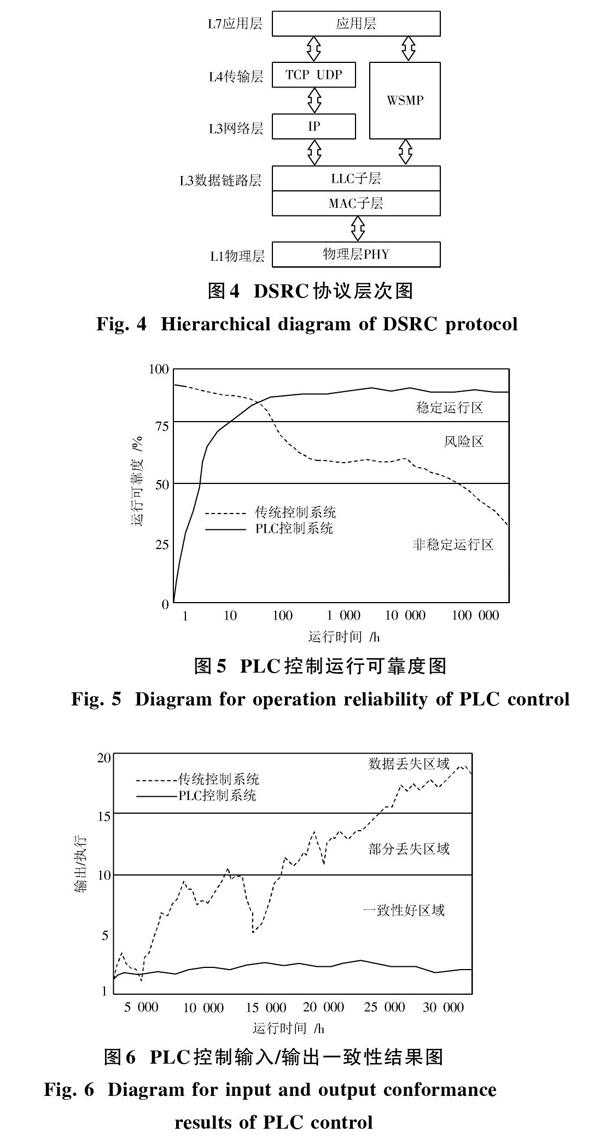
2 实验测试
为了测试本文所设计的车载通信设备自动化控制系统的稳定性及可靠性,文中对其进行了实验测试。首先对其控制运行可靠性进行了测试,分别采用传统控制系统和PLC控制系统进行,得到传统控制系统以及PLC控制系统的运行可靠度。运行可靠度能够衡量控制系统的运行可靠性能。当其值在75%~100%之间时,证明该控制系统可以安全运行。当其值在50%~75%之间时,说明该控制系统能够运行,但存在一定的风险。当其值在50%以下时,说明该控制系统无法正常运行,可靠性差。
由图5可以看到,传统控制系统在运行超过75 h后,其运行可靠度大幅度下降;在超过100 000 h后,其系统运行可靠性已下降至50%以下,控制系统无法正常运行。而对于PLC控制系统,其运行可靠性随着运行时间增大而增大,当运行时间大于10 h时,其运行可靠度上升至75%,并随运行时间的增大持续增长,最终稳定在70%~100%之间。控制系统运行稳定,说明PLC控制系统稳定性良好。
随后对输入、输入执行的一致性进行测试。从图6可以看出,PLC控制系统的输入/执行始终稳定在5以下,而传统控制系统的输入/执行随着运行时间的增长而持续增大。输出/执行小于10时,代表输出与执行能够保持一定的一致性;而在10~15之间时,则代表系统输出与执行有一定的指令丢失;大于15则表示输入/执行无法保持一致性。因此,PLC控制系统具有较好的指令执行正确性。从实验测试结果可得,本文所设计的基于PLC的车载通信设备自动化控制系统具有较好的运行稳定性和控制正确性,能满足车载通信设备控制的需求。
3 结 语
传统车载通信控制系统的抗干扰能力较差、控制准确率低下,限制了车载通信系统的应用。为此,本文开发了基于PLC的车载通信设备自动化控制系统,其主要分为自动化控制模块、PLC控制模块以及车载通信系统。PLC控制模块采用西门子公司的通用闭环控制模块,其可应用于快速闭环控制系统中。当插入不同的软件功能模块便可形成不同的控制结构;采用5层结构的DSRC进行数据的接收与发送,从而提高了数据收发的稳定性。此外,还对控制系统进行了可靠性及抗干扰试验,测试结果验证了该系统的稳定性与可靠性。
参考文献
[1] 裴亮,李晔,冯耀宁,等.基于PLC的喷杆喷雾机变量喷雾自动控制系统设计[J].农机化研究,2018,40(4):129?132.
PEI Liang, LI Ye, FENG Yaoning, et al. Design of variable spray automatic control system for boom sprayer based on PLC [J]. Journal of agricultural mechanization research, 2018, 40(4): 129?132.
[2] 毛梨华.车载通信设备动态运用管理系统方案研究[J].铁道通信信号,2014,50(12):66?69.
MAO Lihua. Research on dynamic application management system of vehicle communication equipment [J]. Railway signalling & communication, 2014, 50(12): 66?69.
[3] 关晓菡,马晓.基于STM32的双向交互式车载通信系统设计[J].单片机与嵌入式系统应用,2016,16(12):36?39.
GUAN Xiaohan, MA Xiao. Two?way interactive vehicle communication system based on STM32 [J]. Microcontrollers & embedded systems, 2016, 16(12): 36?39.
[4] 郭一凡,宋宇飞,林羽晨.基于太阳能的车载无线通信系统设计[J].物联网技术,2016,6(6):58?59.
GUO Yifan, SONG Yufei, LIN Yuchen. Design of vehicle?mounted wireless communication system based on solar energy [J]. Internet of Things technologies, 2016, 6(6): 58?59.
[5] 周鹏飞,乔佳,李良.一种车载设备通信系统的设计与实现[J].计算机应用与软件,2018(3):67?69.
ZHOU Pengfei, QIAO Jia, LI Liang. Design and implementation of a communication system in vehicles [J]. Computer applications and software, 2018(3): 67?69.
[6] 潘玲云,王庆林,张磊.车载“动中通”伺服控制系统研究与应用[J].微型机与应用,2016,35(15):38?41.
PAN Lingyun, WANG Qinglin, ZHANG Lei. Research and application of servo control system for "communication in moving" on vehicle SATCOM [J]. Microcomputer & its applications, 2016, 35(15): 38?41.
[7] 李丹.车载信息安全控制系统的研究[D].长春:吉林农业大学,2016.
LI Dan. Research on vehicle information security control system [D]. Changchun: Jilin Agricultural University, 2016.
[8] 邢红霞.城市轨道交通基于通信的列车控制系统后备模式方案[J].城市轨道交通研究,2012,15(5):42?45.
XING Hongxia. Urban mass transit scheme of CBTC system backup mode [J]. Urban mass transit, 2012, 15(5): 42?45.
[9] 张友兵,王建敏,孙可.基于MVB总线的DMI与车载设备通信方法[J].铁道通信信号,2014,50(11):77?81.
ZHANG Youbing, WANG Jianmin, SUN Ke. Communication method between DMI and vehicle?mounted equipment based on MVB bus [J]. Railway signalling & communication,2014, 50(11): 77?81.
