基于预测和双缓冲区的直升机视景仿真
2018-07-27,,
,,
(海军航空工程学院 青岛校区科研处军用虚拟仿真研究与训练中心,山东 青岛 266041)
0 引言
现代直升机以其独特的环境适应性在军事和民用领域中得到了广泛应用,我国目前正在大力发展直升机,直升机的数量在迅速增加,需要培养大量的直升机飞行员。采用模拟训练的手段可以提高效率、节省经费、保证安全。视景仿真系统在飞行模拟训练中为飞行员提供逼真的视觉感官体验,提高模拟训练的逼真度,是飞行训练模拟器的重要组成部分。与固定翼飞机不同,直升机的起飞降落可以在机场、平地、楼顶平台、舰面等众多地点实现,不局限于机场跑道,因此对视景中的细节要求更高,同时要求视景要与飞控紧密配合,将直升机与场景中地形和目标的交互信息回馈给飞控,以配合直升机在不同的地点降落。目前国内的大部分直升机视景仿真采用的是MultiGen—Paradigm(后与Engenuity和TerreX公司合并成Presagis公司)的VegaPrime(以下简称VP)作为视景驱动软件[1-6],还有一部分采用FlightGear[7]。在直升机视景仿真的报道中,大部分的文章着重讲述了场景的搭建和控制,关于飞控数据的处理并不多[8-10],而在工程实践中必须解决飞控仿真与视景渲染不同步的问题。
为了解决直升机视景仿真中飞控与视景不同步和降落问题,本文首次提出了一种基于双缓冲区和预测机制的直升机着舰视景系统的解决方法。该方法首先将直升机的姿态信息进行采样处理,使之与视景仿真频率匹配,以达到飞控仿真和视景仿真的时间同步性,然后将处理后的姿态信息存储于两个缓冲区中,一个缓冲区的数据传送给视景进行更新;一个缓冲区中的的姿态信息来预测飞控仿真的下一帧数据,然后传送给视景进行碰撞检测,最终使直升机正确降落。接下来首先对飞控与视景不同步的原因进行分析,并给出相应的解决方法,最后给出实验结果。
1 飞控与视景不同步的原因分析
直升机视景仿真中,飞控系统计算出飞机的位置,通过网络传输到视景系统,驱动视景模型库建立战场环境。各系统之间的关系如图1所示,视景控制程序收集飞控和其他模块与视景系统进行交互的各种信息,主要包括直升机和其他目标的姿态位置信息,并把这些信息转换成相应的协议发送到视景渲染模块,将视景渲染模块反馈回来的碰撞信息等进行协议转换后发送给飞控解算;视景控制主程序主要负责对场景中的模型和特效等进行统一的控制和管理;视景渲染模块主要负责接收视景驱动发送过来的信息,并在场景中作出相应的渲染和改变,同时将需要回应的信息发送给视景控制模块。
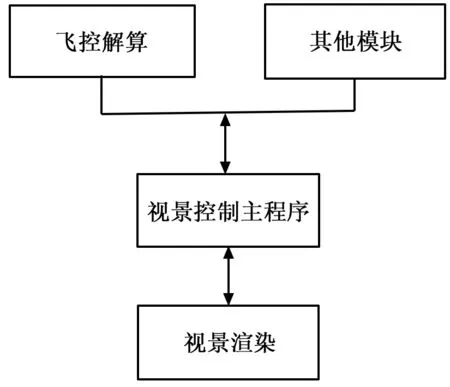
图1 直升机着舰中各系统关系图
飞控解算出的飞机六自由度信息一般会通过网络数据传输给视景模块,由于网络堵塞或者延迟等原因,会出现漏帧的情况。假设飞控的解算频率和视景的刷新频率完全一致,那么在Tn,Tn+1,Tn+2时刻,视景端应该收到Fn,Fn+1,Fn+2帧的数据,但由于网络原因,只收到了Fn,Fn+2帧的数据,这种情况下会导致场景出现卡顿,尤其是飞机做大坡度飞行时,使用者会感觉到场景的抖动。
飞行仿真是比较复杂的系统,一般是根据自己的时钟和仿真步长进行多步长推进的方式进行计算。一般飞行仿真的内部解算采用10 ms的周期进行。视景系统是通过数据来驱动视景模型的,根据视景每帧获取的实体状态进行等步长解算。视景更新频率为 60 Hz,也就是以16.7 ms为步长进行解算。这样就存在刷新频率和数据帧不同步问题, 而且帧周期也不一样,加上每帧计算所花费时间不一样,再加上网络数据传输延时,由此引起数据读错帧。在视景解算时就会发生连续两帧数据读取是同样数据, 或者有些帧数据未被读取等现象(跳帧)[8]。如图2上图所示,在飞控和视景分别以100帧/秒和10帧/秒运行的情况下,在理想情况下,当视景渲染1,2,3,4,5,6,7,8帧时,所用到的飞控数据分别为1,2,4,5,7,9,10,12帧。这样飞控与视景渲染达不到同步,在场景渲染时会出现抖动等情况,影响用户的使用;同时飞控系统需要视景反馈回的碰撞信息进行解算,视景在1,2,3,4,5,6,7,8帧所检测的碰撞信息分别反馈到了飞控的1,2,5,7,9,10,12,13帧,这种非实时反馈的碰撞信息会严重影响飞控的计算结果,导致飞控出现不可预料的错误。

图2 飞控与视景数据传输示例
2 飞控与视景不同步的解决方法
通过第一节的分析可以知道,飞控与视景不同步主要是由两个原因引起的:一是网络传输所导致的漏帧和跳帧;二是飞控的计算频率与视景的刷新频率不一致所导致的错帧。针对这两种问题,采用不同的方法予以解决:一是在视景控制端利用已知数据对没有收到的飞控数据进行模拟推演,保证数据的完整性;二是利用双缓冲区来解决错帧问题。
2.1 利用推演解决漏帧问题
飞控与视景之间的数据通过网络进行传输,网络传输会导致数据丢失,而视景刷新时需要连贯一致的数据,否则会出现场景抖动的现象。为了得到与视景刷新同步的数据,同时又不能增加视景端的计算负担,因此需要在视景端需要利用已经收到的数据推演出丢失的数据,从而保证数据的一致性。假设视景在时刻收到的飞机六自由度数据为{Lonn,Latn,Altn,Hn,Pn,Rn},其中Lonn,Latn,Altn代表了飞机的位置信息,分别是飞机的经度、纬度和高度信息,Hn,Pn,Rn表示飞机的姿态信息,分别是航向角、俯仰角和横滚角信息。视景端同时还会收到飞控传过来的飞机速度数据Vn={Vx,Vy,Vz,Vh,Vp,Vr},Vx,Vy,Vz分别是飞机速度的北向分量,东向分量和天向分量;Vh,Vp,Vr分别是飞机的偏航角速度,俯仰角速度和横滚角速度。而在tn+1时刻没有收到数据。此时视景端需要根据已经收到的飞机位置姿态信息和速度信息推算出飞机在tn+1时刻的位置姿态信息。因为飞机的位置是用经度、纬度和高度来描述的,而飞机的速度信息却是以飞机起飞点为原点,北向为X方向,东向为Y方向,天空为Z方向的笛卡尔坐标系来描述的,因此需要进行坐标变换才能使二者的坐标一致。利用函数f(x)表示从经纬度坐标到北东天坐标的变换,则在北东天坐标系下的飞机位置如公式(1)所示。
Dn’={X,Y,Z,H,P,R}=f(Dn)=
{f(Lonn,Latn,Altn),Hn,Pn,Rn}
(1)
用函数f’(x)表示从北东天坐标系到经纬度坐标系的转换,则视景端在tn+1时刻的飞机六自由度数据如公式(2)所示。
Dn+1=f’(f(Dn)+An)
(2)
2.2 利用双缓冲区解决错帧问题
飞控与视景是一个双向交互的过程,如果视景只是接收飞控数据进行飞机姿态的定位和显示,那么问题变的相对简单,可只对视景接收到的飞机姿态信息进行数据处理后送渲染端进行显示即可,在很多工程应用上都如此处理;而在飞控需要视景实时反馈的碰撞检测结果作为飞控的输入量进行解算时,整个过程成为一个需要实时反馈的系统,这样视景系统不但需要处理接收到的数据,还需要保证将当前飞机与场景中发生碰撞的信息实时返回。本文通过在飞控和视景控制端加入了双数据缓冲区来解决这个问题,如图2下图所示,在飞控的数据传送给视景之前,先将其数据放入双缓冲区中,在缓冲区中对数据进行处理,使得飞控发送给视景的数据和飞控接收到的视景数据都满足要求,能够同步。具体实现时,如图3所示,缓冲区1存放用来进行视景渲染的飞机信息,通过插值计算使飞控解算频率与渲染频率匹配;缓冲区2存放用来进行碰撞检测的飞机信息,通过预测算法使飞控解算频率与渲染频率匹配。视景中放置两架飞机,一架用来渲染,一架“影子飞机”只用来进行碰撞检测的计算,不在场景中进行渲染,这样既可以保证在渲染时按照渲染端的频率进行更新,又可以保证碰撞检测的实时性。

图3 双缓冲区示意图
为了达到频率匹配,视景和飞控中的数据都自带帧号,若当前视景渲染到n帧,飞控解算到m帧,缓冲区1由一个10帧的队列组成,所收到的数据分别为{Dm,Dm+1,Dm+2,Dm+3,Dm+4,Dm+5,Dm+6,Dm+7,Dm+8,Dm+9},用来渲染的数据为{DDn,DDn+1,DDn+2,DDn+3,DDn+4,DDn+5},则它们之间的关系为:
(3)
其中:C1+C2=1,C3+C4=1,C6+C7=1,C8+C9=1。从公示(3)可以看出,利用线性插值算法可从缓冲区1中计算出需要渲染的数据。这样可保证飞控发送过来的数据能够与视景的渲染速度相匹配,如果视景渲染帧速或飞控的解算频率发生改变,则相应修改公式(3)即可。为了保证数据的一致性,缓冲区1中的数据采用滑动窗口进行,按照“先进先出”的原则,采用队列存储缓冲区1的数据。利用缓冲区计算的时候,使用者操作后的效果在视景上显现时会延迟0.01秒,这种延迟不会影响使用者的主观感受。
缓冲区2用来计算当前帧的碰撞检测,本文中采用的LOS碰撞检测,该检测需要提供检测线的起点和终点形成检测线,而检测线的起点和终点依附在飞机尾部上,因此是随着飞机实时更新的。假设视景在第n帧接收到碰撞检测请求,会在第n+1帧将检测结果返回。如果将当前帧的碰撞检测请求直接发送给视景,则结果需要在下一帧才能收到,延迟了一帧。为了解决这个问题,我们设立了第二个缓冲区。假设收到飞控的当前帧数据为第i帧,则在第二个缓冲区中存放的五帧数据分别为{Di-4,Di-3,Di-2,Di-1,Di}。首先根据公式(3)计算出这五帧数据对应的三帧渲染数据{DDn-2,DDn-1,DDn};然后利用飞机当前帧的位置和加速度预测出下一帧飞机的位置姿态。公式如下:
DDn+1=DDn+C0Vn+C1Vn-1
(4)
其中:C0+C1=1,Vn=DDn-DDn-1,Vn-1=DDn-1-DDn-2。将预测到的数据发送给视景中的“影子飞机”,然后将视景发送回来的碰撞检测结果作为输入量传送给飞控进行解算。
3 实验结果
如果直接将飞控数据赋值给视景,我们记录了视景渲染帧数和飞控计算帧数,他们的关系如图4所示,其中横轴是视景渲染帧数,纵轴是飞控计算帧数。若两者的仿真频率完全匹配,则该图中应该是一条直线,而现在却是折线,因此帧率是不匹配的,而且由于帧率不匹配,出现了错帧和漏帧,图中圆圈所示是一处非常典型的错漏帧情况。

图4 视景渲染帧数与飞控仿真帧数关系图

图5 采样后数据、非采样数据和真实数据之间的对比
以飞行高度数据为例,设置飞控仿真频率为100帧/秒,视景渲染频率为50帧/秒,得到根据视景渲染频率采样插值后的数据和没有采样直接接收的两组数据,图5显示了这两组数据与直接按照50帧/秒的频率得到的飞控数据图,其中横轴是仿真时间,纵轴是分别是三组数据,线段1是按照50帧/秒的频率得到的飞控数据(即真实数据);线段2是根据视景渲染频率采样插值后的数据;线段3是没有采样直接接收的数据。图5上图是原始图,下图是局部细节放大后的图像。从中可以看出,线2比线3更接近真实数据,即根据视景渲染频率采样插值后的数据比没有采样直接接收的数据更接近原始数据。以50个数据为一组,取100组,将这两组数据与真实数据之差的方差进行对比,如图6上图所示,其中曲线1表示根据视景渲染频率采样插值后的数据与真实数据之差的方差,曲线2是直接接收的数据与真实数据之差的方差;可以看出,曲线1数据与真实数据之差的方差更小,因此本文的采样算法是成功的。用同样的方法,以50个数据为一组,取100组,计算预测到的飞控数据与真实数据之差的方差,其结果如图6下图所示,本文的预测数据越来越收敛与真实数据,因此预测算法也是成功的。

图6 方差分析图
4 结束语
该方法目前已应用于多个直升机模拟训练项目中,有效解决了由于飞控与视景不同步所引起的场景抖动问题,并且能够保证直升机在多个地点正常降落,目前该方法已成功应用于通用直升机着舰系统,取得了非常好的效果。下一步将在飞控数据预测中进一步优化算法,使预测的数据更接近真实值。
