构架式可展开天线自由度与奇异性分析
2018-07-23,,*,,,
,,*,,,
1. 中国空间技术研究院 西安分院,西安 710100 2. 燕山大学 机械工程学院,秦皇岛 066004
构架式可展开天线是一种由多基本单元组合而成的大型桁架结构,具有收纳比高、精度高、结构稳定性好等特点[1]。构架式天线按基本单元形状分为平面构架天线和空间构架天线,如三角形平面单元[2]和四面体单元[3-4]、四棱锥单元[5]、六棱台单元[6]等。根据基本单元的尺寸大小和单元间连接形式可构造不同桁架结构系统,满足不同天线反射面的设计要求。目前已有多个大型的构架式可展开天线成功应用于俄罗斯“自然号”、“联盟号”飞船、“资源”系列卫星及“和平号”空间站等多个航天任务中。大部分天线都是针对四面体为基本组成单元进行研制,如General Dynamics Corporation(GDC)研制的5.2m构架式天线[7],Johnson Space Center(JSC)研制出的口径7m的构架式可展天线并成功应用在“Kondor”航天器上[8]。
四面体单元构架可展开天线表现出多环耦合、模块化、大尺度柔性等特征,启发了关于构架可展开天线在构型结构设计、力学分析等领域的研究与深入发展。文献[9]对构架几何进行了分析,特别是对各铰链进行了设计,满足多杆在花盘位置的运动。文献[10]描述了构架式天线四面体单元在节点处有3根腹杆和6根同步杆,腹杆和同步杆节点处有滑块驱动并同步运动,弹簧提供驱动力,驱动位置设有阻尼器。文献[11]基于拉格朗日等式,考虑了空间构架式反射器展开数学模型,估计反射器中杆件的载荷受力。由于数学模型对运动特征考虑不全面,尝试建立起展开物理模型,在尺寸分析和物理状态等前提下,以获得相同参数为基础,可识别出描述天线展开的主要参数。文献[12]介绍了天线反射器的结构总体方案和关键部件的结构设计,同时对反射器的形面精度、热变形及刚度等指标进行了分析计算,验证了此四面体可展开天线可以满足卫星对天线的系统指标要求。文献[13]对SAR卫星构架可展开天线进行了模态分析,为驱动的参数提供了设计依据。文献[14]阐述了四面体单元构架式天线总体、结构和电气方面的研究设计,并从力学和热变形角度进行了实际工况分析。
上述文献对构架式可展开天线的整体结构及刚体动力学进行了详细的分析,但对天线机构构型综合研究较少。且四面体单元构架式天线杆件及花盘等构件众多,导致天线展开时运动协调性得不到保证。为保证天线展开时各部件协调动作,避免出现展开不完全的现象,需对天线基本单元在展开过程中的自由度和奇异性进行分析,构建花盘姿态运动的特点,对提高大型可展天线这一典型关键载荷产品的可靠性,开展大型可展天线构型的研究具有重要的理论基础和工程价值。
1 构架式天线构型分析
构架式天线属于大型空间可展机构,由若干四面体单元构成,如图1所示。在连续展开过程中,其四面体单元属于变胞机构,其特点为自由度和拓扑结构可变且能根据不同工作任务改变约束特征,但构型综合难度较大。根据变胞机构的这些特点使得对构架式天线的结构分析和设计中存在一定的困难。四面体变胞单元为多环机构,且具有高度耦合性,为保证航天机构工作可靠性,通常杆件以转动副R连接。以构型为3RR-3RRR的四面体单元为研究对象,构件与构件之间连接方式由转动铰链相连,如图2所示。构架式天线零部件多,运动较为复杂,并且现有的四面体单元构架式天线在展开到工作位置时具有很大的瞬时冲击。为分析构架式天线各部件运动的协调性,可根据螺旋理论能同时表示运动副轴线的位置和运动副类型的特点[15-16],采用螺旋理论对构架式天线进行自由度研究,分析四面体单元的奇异性及组网后的运动学特性,保证构架式天线展开协调。

图1 四面体单元构架式天线Fig.1 A truss antenna composed by tetrahedral elements

图2 3RR-3RRR单元及花盘结构Fig.2 3RR-3RRR element and disk structure
四面体单元的闭环数为[17]:
l=g-n+1=15-13+1=3
(1)
式中:l为独立闭环数目;g为运动副数目;n为杆件数目。
为计算简便,将具有3个闭环数的四面体单元拆分为二闭环机构和两杆件机构,如图3所示。2闭环机构的两点A、C的运动确定时,两杆件上相对应的两端点运动也确定[18]。因此,在分析二闭环机构的基础上可知3RR-3RRR单元的运动特性。
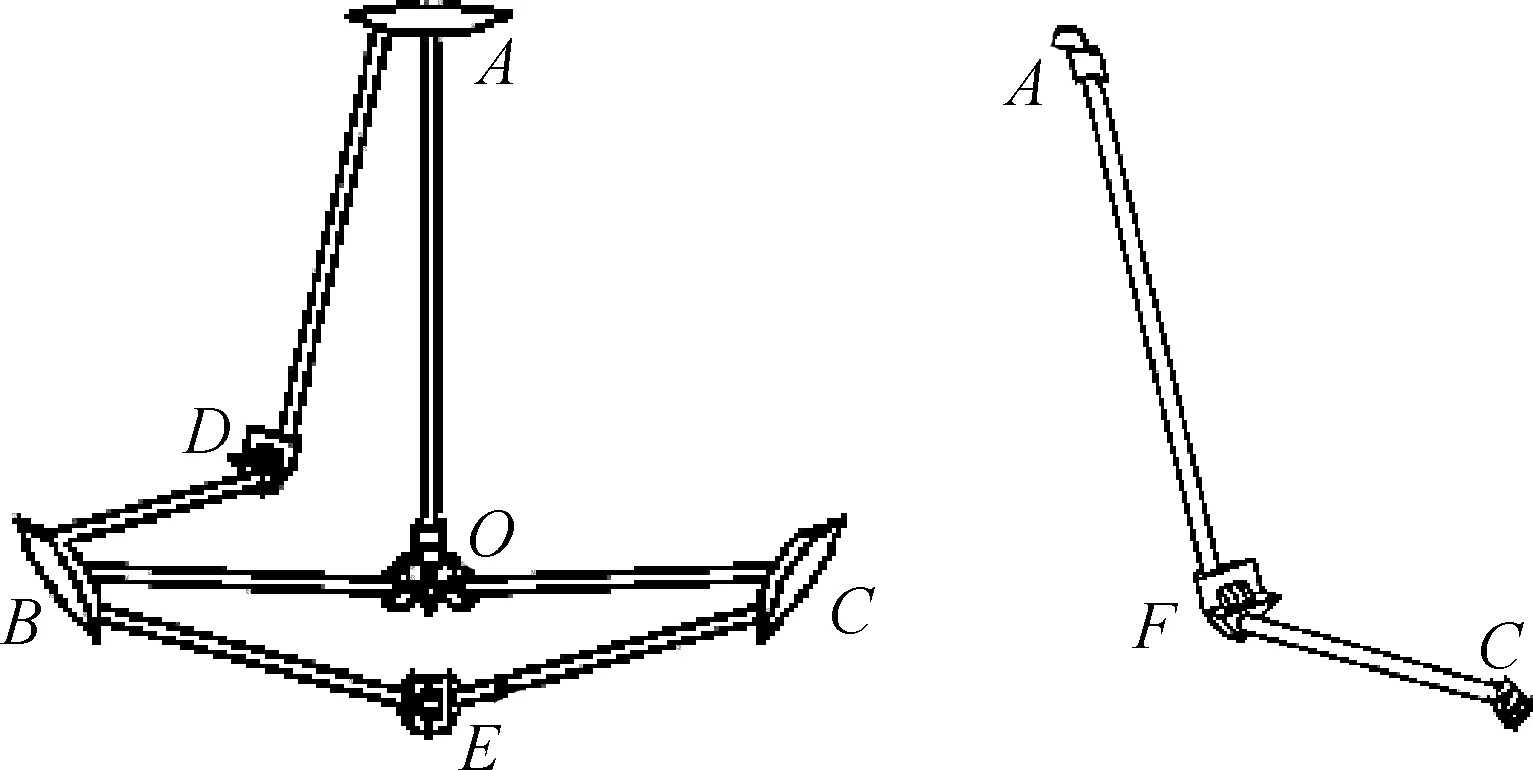
图3 四面体单元拆分Fig.3 Decomposition of the tetrahedron
2 构架式天线单元自由度分析
2.1 单闭环机构的自由度
对3RR-3RRR机构最基本的认识是自由度及其奇异特性,但由于过约束的存在,使自由度计算成为一个难点。首先考虑独立的单闭环机构的自由度,如图4所示。花盘O在平面ABC上的投影为原点P,原点P到直线AB的垂线为x轴,平面ABC的法线方向为z轴,以右手定则确立y轴建立坐标系。
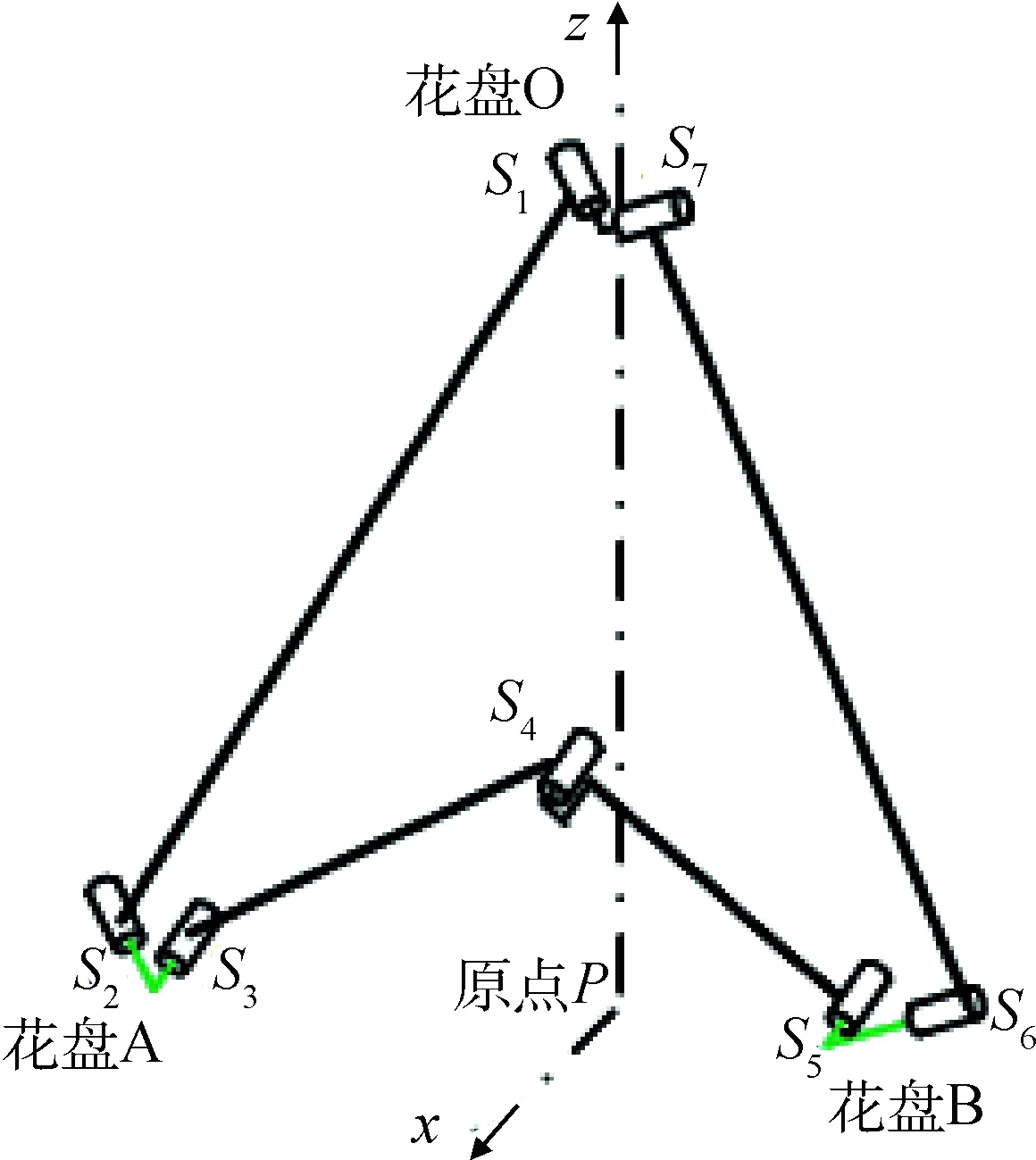
图4 单闭环机构Fig.4 Single closed-loop mechanism

(2)
式中:(xiyizi)、(xjyj0)、(xkyk0)、(xm0zm)、(xk-yk0)、(xj-yj0)、(xi-yizi)分别为铰链S1~S7中心位置的坐标。
根据螺旋理论[17,19],约束螺旋与运动螺旋的互易积为0,即
$∘$r=0
(3)
式中:$为运动螺旋;$r为约束螺旋;“∘”代表两旋量的互易积符号。
当构架式天线转动副轴线S3、S4、S5不平行于ABC平面,此时b≠0,由式(2)与式(3)可求得此单闭环机构的约束螺旋$r=(0 0 0;0 0 0),可知此单闭环单元无公共约束,则单闭环单元的公共约束数为λ=0,单闭环单元的阶数d=6-λ=6。此时,单闭环单元的自由度为[17]:
M=n-dl=7-6×1=1
(4)
式中:M为机构自由度数;d为单元阶数。
2.2 二闭环机构的自由度及过约束分析
再次分析整个二闭环机构,二闭环机构可视为并联机构,由3条支链Z1、Z2、Z3组成,如图5所示。支链Z1由铰链1~5及其铰链之间的杆组成,支链Z2由铰链6~7及其杆件组成,支链Z3由铰链8~12及其杆件组成。将花盘O作为静平台,花盘B作为动平台。支链Z1的运动螺旋系为:
(5)
支链Z2的运动螺旋系为:
(6)
支链Z3的运动螺旋系为:
(7)
其中支链Z1和支链Z2的运动螺旋在第2.1节已求出。
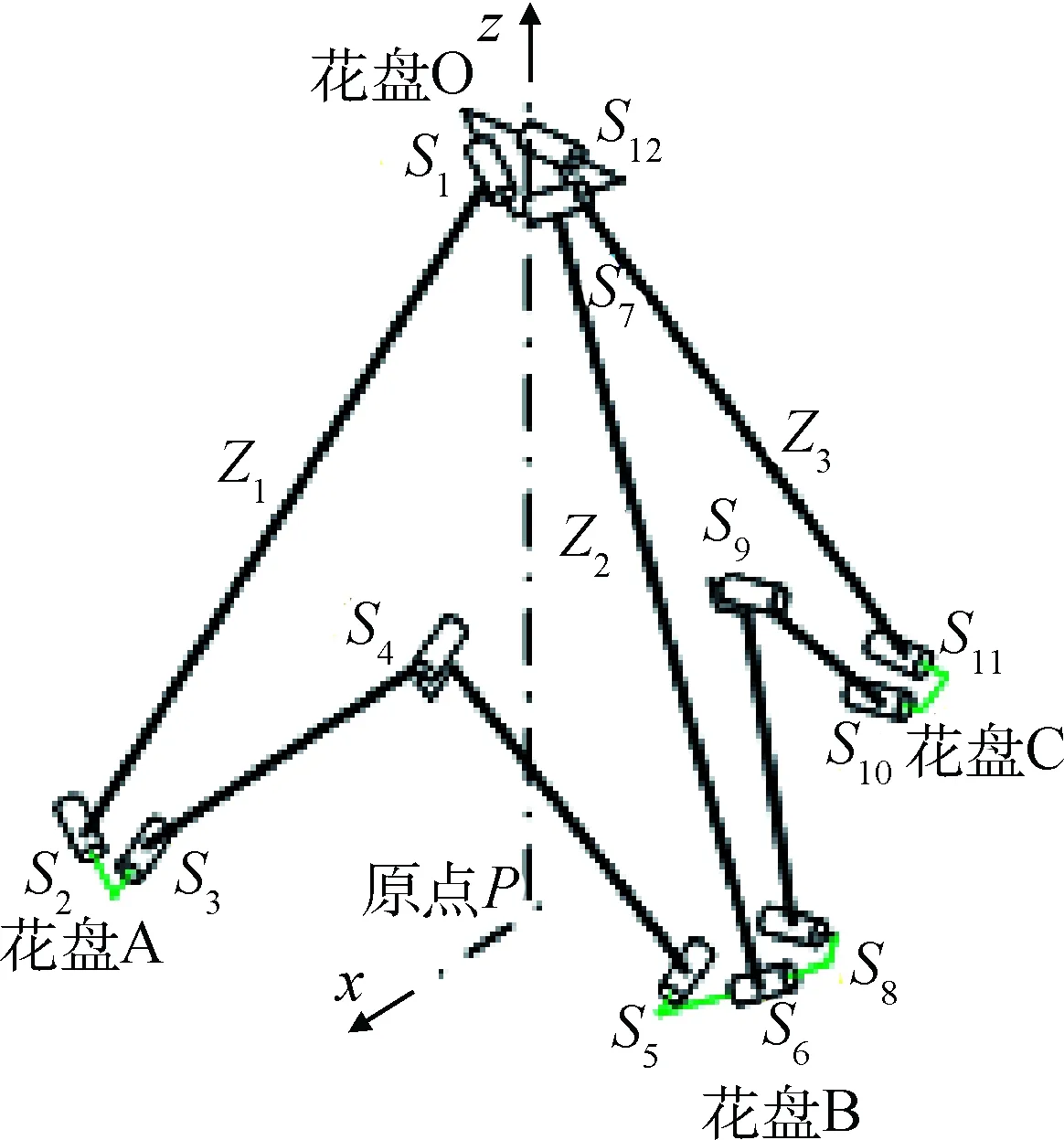
图5 二闭环机构Fig.5 Two closed-loops mechanism
由式(3)可知,支链Z1的约束螺旋为:
(8)
支链Z2的约束螺旋为:
(9)

(10)
因此二闭环机构受到6个约束旋量,且没有公共约束λ=0,则阶数与单闭环单元一样d=6-λ=6。二闭环单元受到4个约束力偶和2个约束力,其中4个约束力偶的最大无关数为3[20],则动平台B受到5个线性不相关的约束,因此二闭环机构约束螺旋是五系螺旋结构即k=5,且含有过约束。过约束个数为[7]:
(11)
式中:qi为第i支链约束螺旋的数目;λ为公共约束数目;p为支链数目。
由修正的Kutzbach-Grübler[17]公式可得到二闭环机构的自由度为:
6×(11-12-1)+12+1-0=1
(12)
式中:fi为第i个运动副的相对自由度数;ν为多环并联机构在去除公共约束的因素后的过约束的数目;ζ为机构中存在的局部自由度。
二闭环单元的自由度为1,则此四面体单元的自由度也为1。将式(8)、式(9)、式(10)代入式(2)中,再次求约束螺旋的反螺旋,可得到运动平台B的运动螺旋为:
(13)

通过上述分析,二闭环机构含有1个过约束,且此过约束为约束力偶。两杆件有3个转动副即含有3个运动螺旋且对机构运动无影响,对照二闭环中的旋量$3、$4、$5,两杆件的3个运动螺旋独立,因此两杆件含有3个约束螺旋即含有3个过约束,则四面体单元为4过约束机构。
3 四面体单元的奇异分析
3.1 特殊位形下的奇异特性
在设计构架可展开天线各部件结构时,应分析出3RR-3RRR单元的奇异性,可避免奇异特性导致的收展不协调性。对四面体单元进行约束奇异分析时,基于螺旋理论判定线矢量不同几何空间的线性相关性来分析四面体单元的奇异性[21]。

(14)

5×(11-12-1)+12+0-0=2
(15)
此位形下自由度与第2.2节中b≠0时相比多了1个自由度,这种奇异特性被称为约束奇异,位形如图6所示。
图6 奇异位形Fig.6 Singularity configuration
3.2 自由度瞬时性判别
计算出在b=0位形下有2个自由度后,还须判断自由度的瞬时性,若为瞬时自由度,则应当舍去。此位形下对式(9)和式(14)求其反螺旋,求得B的运动螺旋为:
(16)
4 多单元组网自由度分析
构架式天线各四面体单元采用共用花盘的方式联接在一起,如图7所示3个单元体两两共用一个花盘,把这样的3个四面体单元所组成的机构称之为基本组合单元。
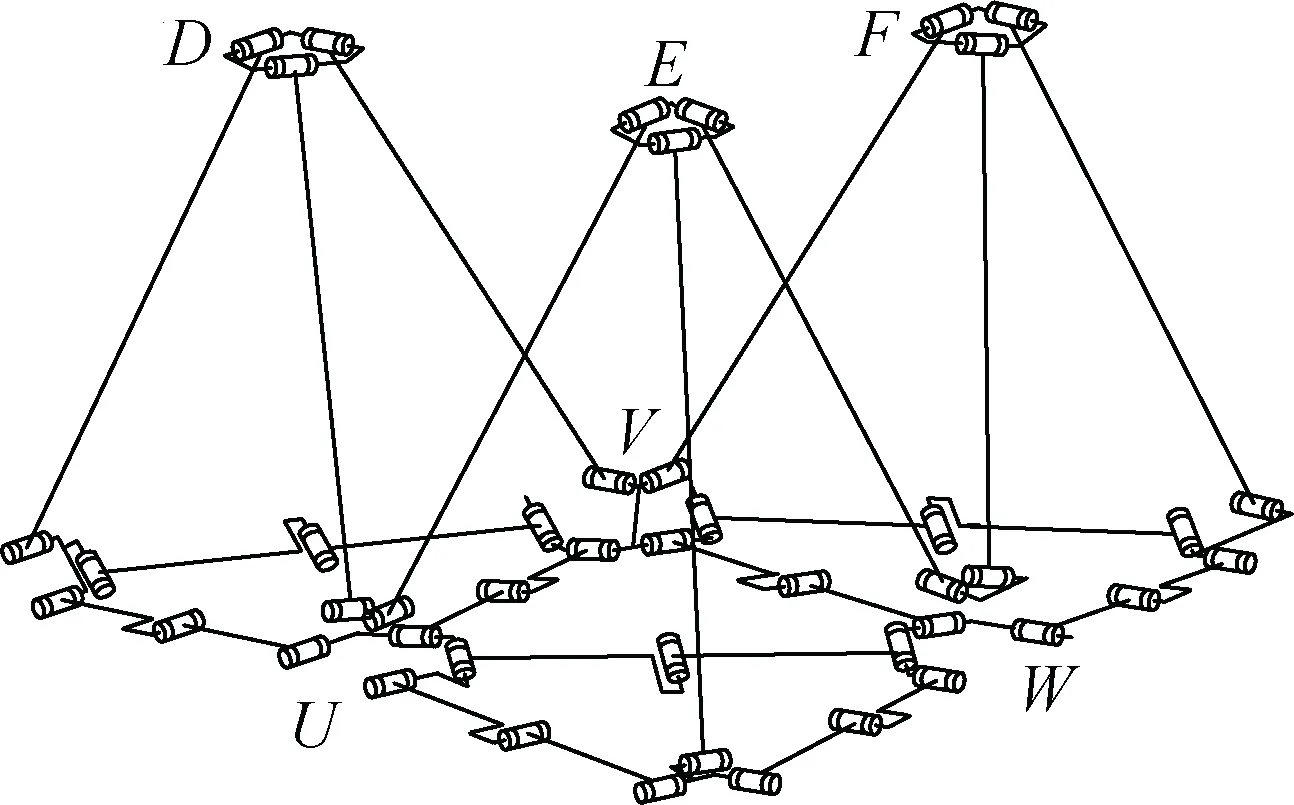
图7 基本组合单元Fig.7 Basic combination unit
在计算多单元自由度时,此组合单元可以形成3个2RR-RRR单闭环构成的机构,如图8(a)所示。该机构可看成3个7R单闭环机构组成,整个机构在收展过程中,仅实现两相邻花盘的收缩或远离移动,并不影响花盘在单元自身的运动约束。由第2.2节可知单闭环机构的自由度为1,实现底面两花盘的相对运动为一维移动,因此可将3个单闭环机构等效为3个P副平面闭环机构,如图8(b)所示。
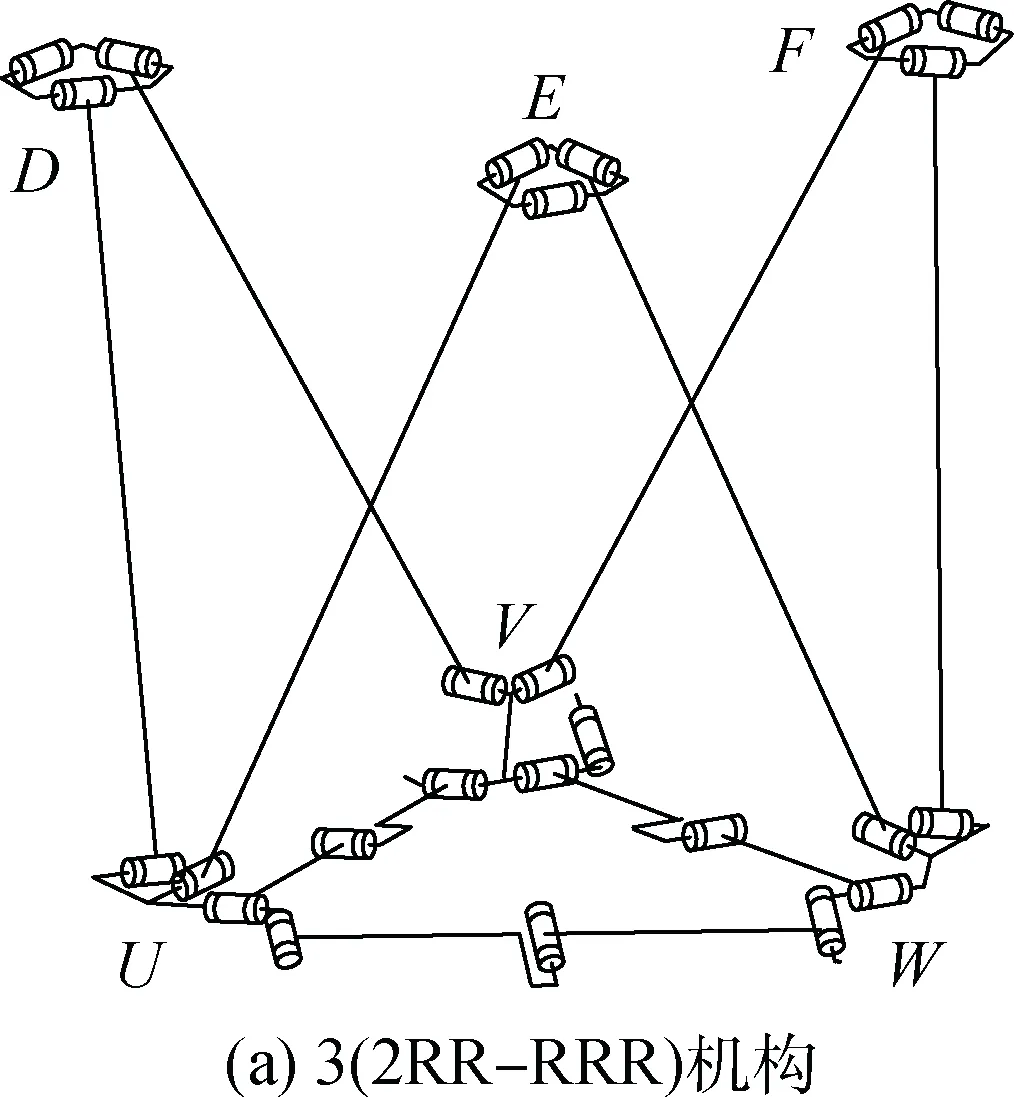

图8 机构等效Fig.8 Equivalent mechanisms
该机构也可看成一个两支链并联机构,把花盘3看成定平台,花盘1看成动平台,则两支链分别为包含移动副的P1和P2P3支链。在花盘3中心建立参考坐标3-xy,则P1支链的约束螺旋为:
(17)
P2P3支链的约束螺旋为:
(18)
由此可知该等效机构含公共约束为:
(19)
则λ=1,由于是平面机构,d=3-λ=2,由式(4)可知3P副机构的自由度为1。对上述支链的约束螺旋求反螺旋可得花盘1的运动螺旋为:
(20)
因此,基本组合单元的自由度为1,且花盘1和花盘3能够沿着固定方向相对运动,实现展开收拢运动。
当天线在收展时,3个上花盘节点D、E、F在运动过程中各节点沿着两节点方向相对移动,但不稳定。在桁架结构中,应尽可能地避免局部模态,考虑到多层的桁架机构具有更好的结构刚度,要使机构的每一个闭环都是封闭的,这样才能形成一个稳定的结构体。而连接支链一般采用构型为SRS支链、SPS支链、SRU支链或UPS支链,为使结构简单和对称,选择SRS支链为上花盘联接的约束支链,构型为3(3RR-3RRR)-3SRS,如图9所示。此时SRS支链还有6个自由度,相当于虚约束不会对原来的基本组合单元运动产生影响,使收展运动协调。综上可知,由3RR-3RRR四面体组成的构架式可展开天线的自由度为1。
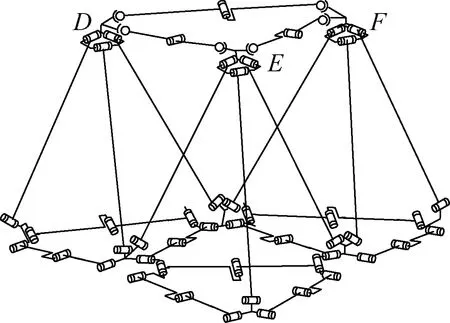
图9 3(3RR-3RRR)-3SRS机构Fig.9 3(3RR-3RRR)-3SRS mechanism
5 多单元花盘间距变化
为更好研究构架式天线的展开特性,验证由3RR-3RRR单元组成的构架式天线为单自由度天线和运动协调性,可对基本组合单元进行运动学分析。因为上花盘连接支链为6自由度支链,不影响机构的运动,在分析时上花盘支链同样可省略。将天线中的花盘简化成一个具有姿态的刚性点构件进行分析,如图10所示。3个收拢单元的3个底面分别绕三角形UVW的边UV、VW和UW偏转β,令底花盘V固定,在V点建立参考坐标系V-xyz,输入为同步两连杆的转角大小θ。

图10 收展机构运动学分析简图Fig.10 Kinematics analysis of combination unit
L、M和N的位置矢量分别为:
(21)
(22)
(23)
进一步可得出特征单元的L、M、N3个外侧节点两两间的相对距离变化,如图11所示。

图11 L、M、N3个外侧节点间距变化Fig.11 Three outer nodes L,M,N spacing
由于仿真模型为根据布置于球面的等边三角形而划分得到的机构,3个外侧节点具有很好的对称性,由图11可看出在收拢过程中单元的3个外侧节点L、M、N之间的相对距离曲线重合,并且节点之间互相靠近收缩,实现了在单输入驱动下运动输出构件收拢的期望运动,并验证了由3RR-3RRR单元组成的构架式天线在收展过程中运动的协调性。
6 结束语
本文基于螺旋理论对组成构架式可展开天线的3RR-3RRR四面体单元构型综合,得到了具有收展运动特性的单自由度机构,并可在设计阶段指导四面体单元结构的设计,避免奇异性带来收展不协调的影响。多单元组网后,反射器桁架系统依然是单自由度结构,可实现对桁架天线的可控展开,并验证了构架式天线整体在工作时能收拢或完全展开,为其展开控制与展开动力学等后续研究提供坚实基础。在工作实践中,对构架式天线反射器自由度和奇异特性的研究有利于构架式空间可展开天线的结构设计和研究,并且可运用于其他空间可展机构,具有较强的应用性。
