基于等效焦面的离轴遥感相机积分时间计算方法
2018-07-23,,,,,
,,,,,
航天东方红卫星有限公司,北京 100094
目前,随着对地观测遥感卫星的飞速发展,相机的成像性能直接决定了卫星的整体性能和最终图像质量[1-2]。由于轴对称反射光学系统不可避免地存在中心遮拦,中心遮拦的存在不仅会损失光通量,而且降低了系统中、低频的衍射极限调制传递函数(MTF)值。
为了解决轴对称反射光学系统存在的中心遮拦问题,科研工作者提出了离轴反射光学系统,通过增加轴对称系统孔径离轴量、增加轴对称反射系统的离轴视场角,或者两者结合的办法来避免中心遮拦[3]。
相对于同轴光学系统的成像模型(光轴与视轴重合,正对星下点成像,如图1(a)所示),离轴反射系统通过将镜面进行合理的倾斜和偏心,消除了中心遮拦,但是导致实际视轴与光轴存在一定角度(离轴角),这样卫星成像的模型如图1(b)所示。这种离轴空间相机实际成像时,由于视轴离星下点较远,实际成像质量会受到影响;为了解决这种问题,提高成像质量,目前国内外的离轴光学遥感卫星通常会让相机整体俯仰一个角度来修正离轴角,如图1(c)所示,这样视轴就可以重新移动至对星下点成像,一定程度上提高了在轨的成像质量。但是这样的设计会引入一个新的问题:焦平面与星下点水平面存在一定夹角,传统的积分时间计算结果将由于真正电荷转移时间对应的像元尺寸发生变化而无法得到精确的积分时间。
本文针对上述问题,提出一种基于等效焦面的积分时间计算方法,该方法构建一个与星下点水平面平行的等效焦面,通过建立严密的几何关系,求出真正电荷转移时间对应的像元尺寸,从而得到准确的积分时间。该方法可以有效提高积分时间计算精度,提高像移补偿精度,最终提高成像质量。
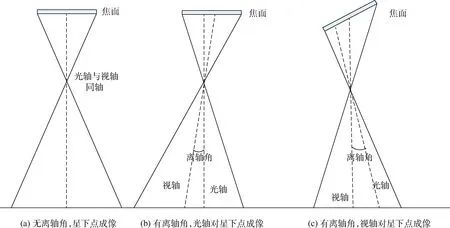
图1 不同光学系统成像示意Fig.1 Diagram of different optical system
1 传统的积分时间分析计算
光学遥感卫星积分时间定义为电荷耦合器件(CCD)的光敏元的电荷累积的时间,即相邻两个转移脉冲之间的时间间隔。传统的积分时间计算方法分为同轴光学系统和离轴光学系统的积分时间计算方法,两种光学系统分别如图1(a)和图1(b)所示。
1.1 同轴光学系统积分时间计算方法
传统的同轴光学系统星下点成像时,光学系统成像模型如图1(a)所示,CCD成像需要光电子转移的速度与像面图像的运动保持同步,即积分时间内相机焦面上的像移与相机单个像元的尺寸相同[4-5],此时相机积分时间为:
(1)
式中:Tint为积分时间;d为CCD探测器的像元尺寸;f为相机焦距;V为摄影点对应的地速;L为摄影点对应的斜距。像元尺寸和相机焦距对于固定的相机都是已知量,而摄影点地速是指地表摄影点相对于相机焦平面中心的运动速度在平行于焦平面内(相机系XOY面)的分量,该矢量的方向在过摄影点平行于焦平面的星下点水平面内。摄影点斜距即在摄影轴线上,从卫星相机焦平面像元中心到摄影点之间的距离。某一成像时刻,相机成像时视场内不同摄影点对应的摄影斜距存在差异,因此通常情况下摄影点对应的地速和斜距通过STK建模仿真获得[6-10]。
1.2 离轴光学系统积分时间计算方法
对于离轴相机,视轴和光轴之间存在一定的离轴角,但是相机没有整体俯仰一个角度,焦平面平行于星下点水平面的情况,如图1(b)所示,此时只要将式(1)中的相机焦距f用相机的视主距f'替代即可,积分时间为:
(2)
式中:f′为相机视主距,
(3)
式中:α为相机离轴角。与第1.1节介绍的同轴光学系统积分时间计算方法相同,像元尺寸d、相机焦距f和相机离轴角α对于固定的相机都是已知量。摄影点地速V和摄影点斜距L通过STK建模仿真获得[6-10]。
2 基于等效焦面的离轴遥感相机积分时间计算方法
目前离轴遥感卫星设计中,为了提高成像质量,通常会让相机整体俯仰一个角度,从而使视轴可以重新移动至对星下点成像,但这样就会引入一个新的问题:焦平面与星下点水平面存在一定夹角,如图2所示,第1.2节介绍传统的离轴光学系统积分时间计算方法中由于真正电荷转移时间对应的像元尺寸发生变化而无法得到精确的积分时间。
根据这种情况下的几何光路可以看出,需要求出此时卫星飞过地面分辨率对应距离所用的时间,这才是真正准确的积分时间(包含实际曝光时间正程和电荷转移逆程的最大积分时间)。因此,本文提出的积分时间计算方法通过构建与星下点水平面平行的等效焦面,求出在等效焦平面中的像元尺寸dWU,即可求出准确的积分时间,如图3所示。
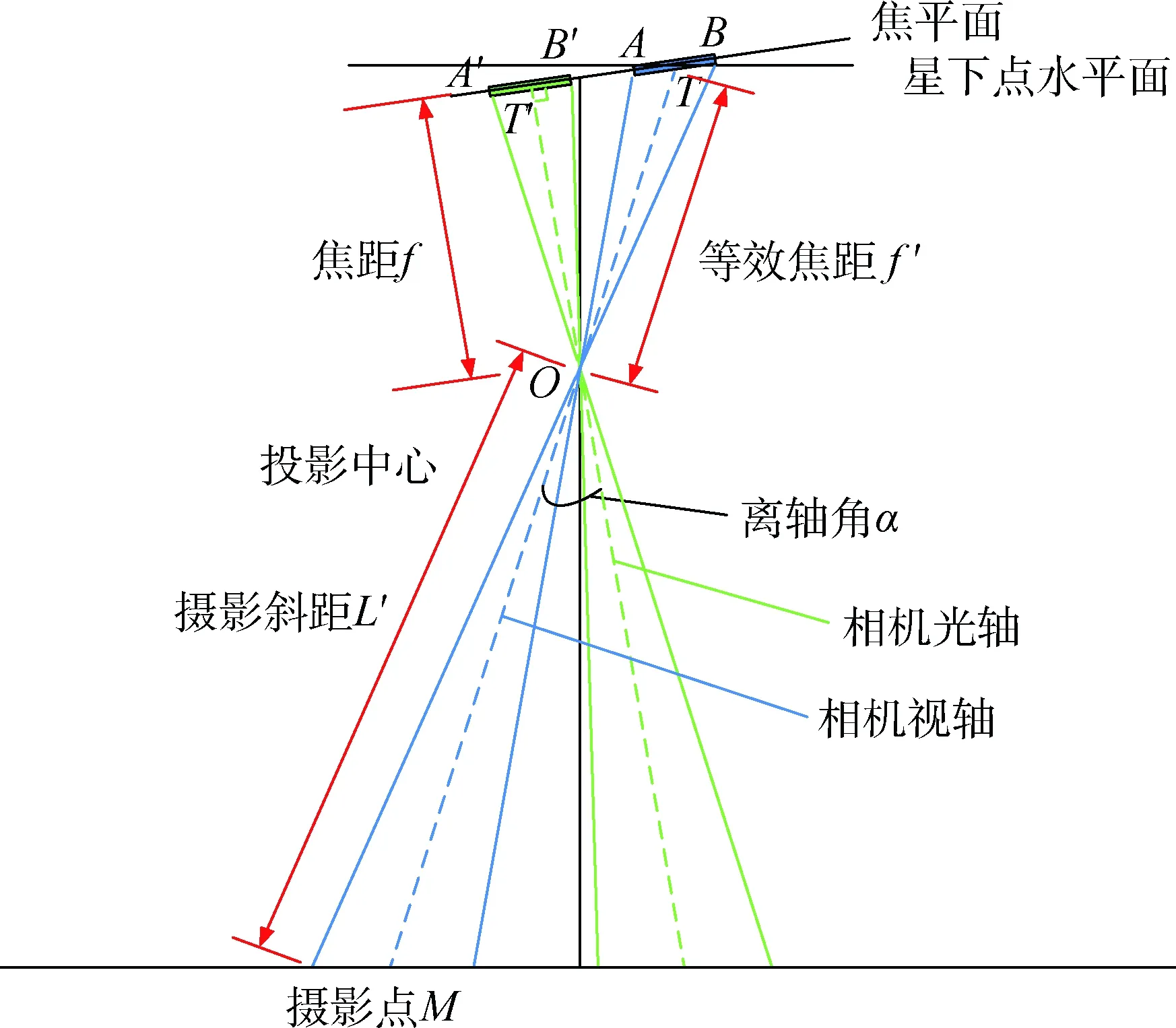
图2 焦平面与星下点水平面存在一定夹角时成像几何关系示意Fig.2 Geometric relations digram of angles between focal plane and horizontal plane
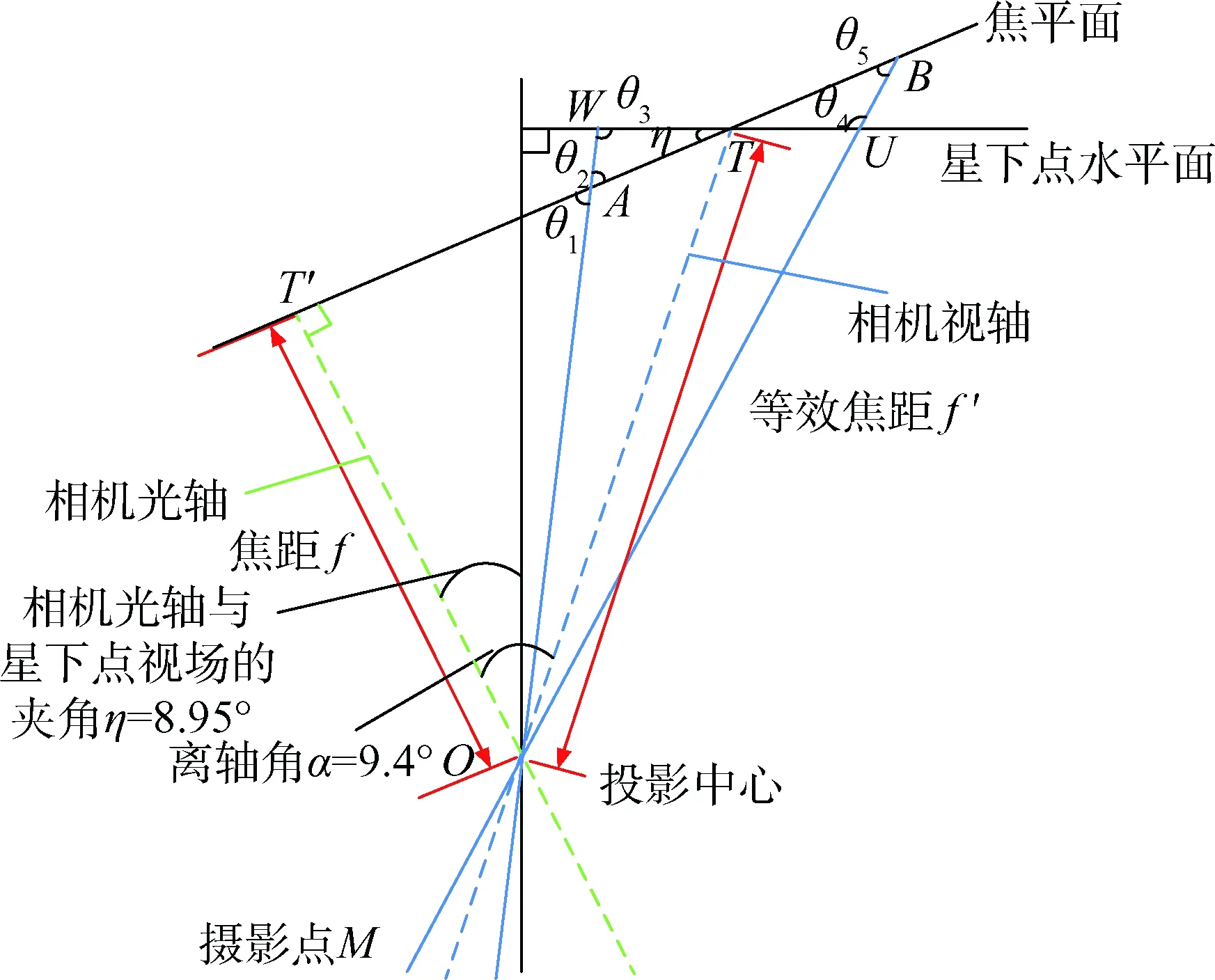
图3 等效焦面中的像元尺寸几何关系示意Fig.3 Geometric relation diagram of pixel width in equivalent focal plane
求等效焦平面中像元尺寸dWU的过程如下:首先,在三角形ΔAOT′中,求出θ1;然后在三角形ΔATW中,根据正弦定理求出dWT:
(4)
同理,在三角形ΔBOT′中,求出θ5,然后在三角形ΔBTU中,根据正弦定理求出dUT:
(5)
最后求出等效焦面中的像元尺寸dWU的长度和视主距f′:
dWU=dWT+dUT=
(6)
(7)
按照式(6)(7)得到与星下点水平面平行的等效像元尺寸dWU和与视轴重合的视主距f′后,相机积分时间计算变为:
(8)
3 仿真分析
3.1 仿真输入条件
针对本文提出的基于等效焦面的离轴遥感相机积分时间计算方法进行仿真,仿真输入条件如下。
1)轨道参数:
轨道类型——太阳同步轨道;
轨道高度——645 km;
轨道倾角——97.97°;
降交点地方时——10:30am。
2)相机参数:
CCD像元尺寸d=25μm;
焦距f=543 mm;
离轴角α=9.4°;
相机光轴与星下点视轴的夹角η=8.95°。
3)仿真时间:2 h。
3.3 仿真结果分析
在STK中按照第3.2节的仿真输入条件建立卫星及相机模型,用STK仿真得到相机视轴相邻两个时刻(间隔1 s)与地球表面交点的位置坐标(x,y,z)及斜距L,地速V计算如下:
(9)
式中:dt为数据采样间隔,这里设为1 s。采用本文提出的积分时间计算方法可以得出相机仿真成像过程中,中心像元的积分时间范围为4.18~4.34 ms,对比传统的未考虑焦平面与星下点水平面夹角的积分时间计算方法得到的积分时间范围是4.23~4.40 ms,计算精度提高了1.2%,对比结果如图4所示。
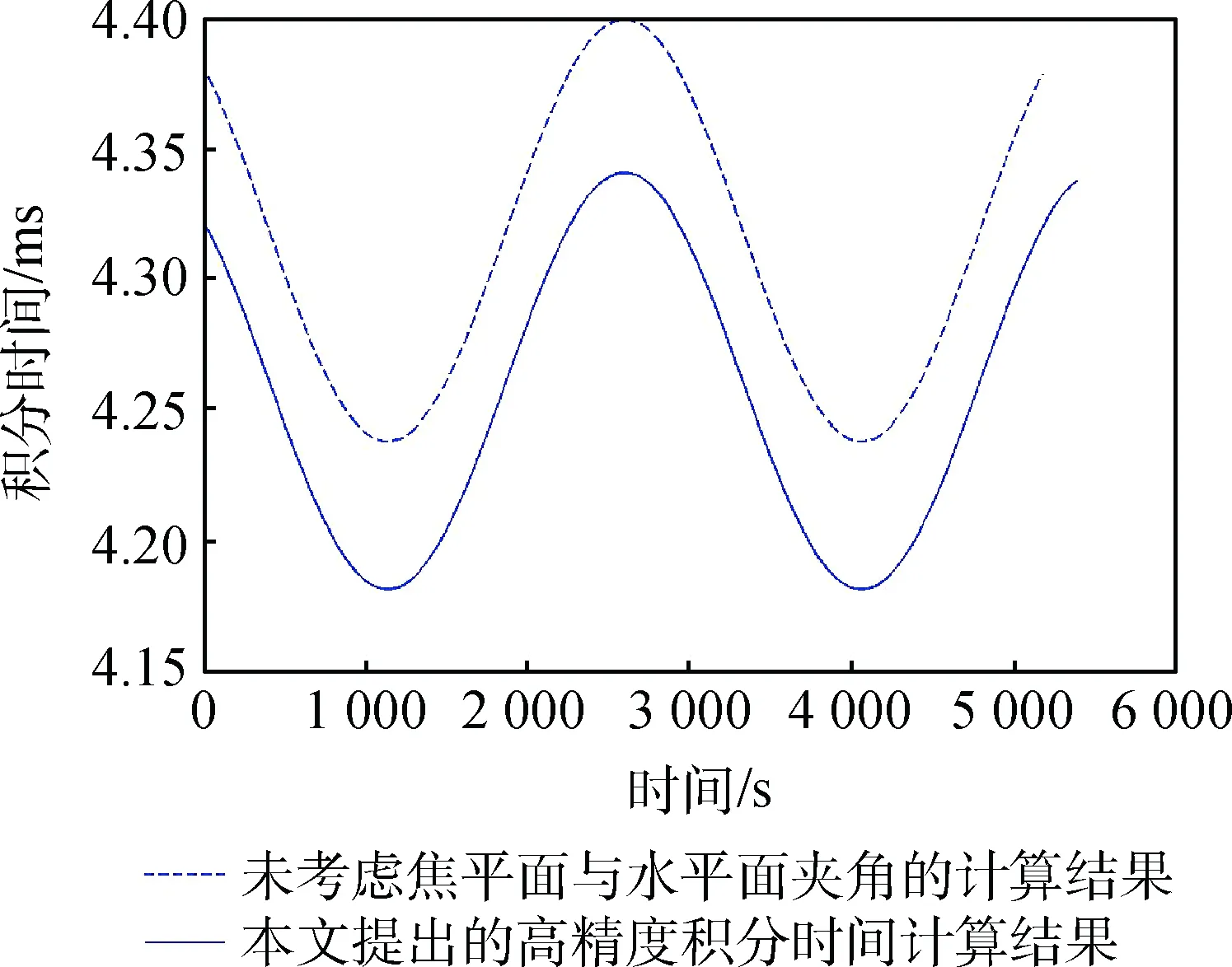
图4 积分时间对比分析结果Fig.4 Comparison of different integral time by different methods
由以上对比分析可以看出,采用本文提出的基于等效焦面的离轴相机积分时间计算方法,可以得到更精确的积分时间,从而提高像移匹配精度,最终提高在轨成像质量。
4 结束语
离轴遥感相机是未来对地观测小卫星发展的趋势,本文针对目前离轴遥感相机,视轴对星下点成像,导致焦平面与星下点水平面不平行,积分时间计算不准确的问题,提出一种基于等效焦面的高精度积分时间计算方法,利用光轴、视轴与星下点水平面之间成像几何关系,通过推导计算出等效焦面中的像元尺寸,改进了积分时间计算方法。仿真分析表明,该方法能将传统的积分时间计算方法的准确度提高1.2%,在轨应用后可以提高像移补偿精度,最终提高成像质量。
