卫星姿态控制系统执行器的故障诊断方法研究
2018-06-19陈辛魏炳翌闻新
陈辛 魏炳翌 闻新


摘要: 小卫星具有成本低、 体积小、 灵活性高等优点, 多颗小卫星协同工作完成太空探索任务已逐渐成为国际航天技术发展的研究热点之一。 针对脉冲等离子体推进器(Pulsed Plasma Thruster, PPT)作为执行器的卫星姿态控制系统常见故障问题, 设计了一种基于新型级联前馈神经网络的故障诊断系统。 该系统采用自组织神经网络训练算法, 结合训练误差与拓扑信息, 优化神经网络结构, 提高其泛化性能, 进而应用神经网络模拟PPT的动力学特性开展故障诊断。 仿真结果表明, 该训练算法能优化网络结构, 提升了故障诊断策略的有效性与可靠性。
关键词: 小卫星; 姿态控制; 神经网络; 故障诊断; 脉冲等离子体推进器
中图分类号: V439+.2文献标识码: A文章编号: 1673-5048(2018)02-0069-08
0引言
近年来, 航天科学技术日益进步, 卫星的种类也随之不断丰富。 目前, 多颗小卫星协同工作已经成为航天领域发展的新方向, 也是国内外研究的最新热点[1]。 小卫星具有成本低、 体积小、 灵活性高等优点, 可通过编队飞行的方式替代大型航天器完成任务。 小卫星群编队飞行时, 要求每颗卫星均具备良好的轨道与姿态机动能力, 从而顺利完成队形保持及协同合作等任务, 这对卫星控制系统与执行器提出了较高要求。 传统的卫星姿态控制系统中普遍使用反作用飞轮作为执行器, 但体积和重量等因素限制了其在小卫星中的使用。 目前, 作为电推进技术之一的脉冲等离子体推进器(Pulsed Plasma Thruster, PPT)因具有成本低、 体积小、 效率高、 控制精度高等优点, 被广泛用作小卫星的执行器[2]。 然而, 卫星在环境恶劣的太空中工作会受到很多未知因素影响。 此外, PPT的工作过程涉及电、 热、 磁等多个过程, 一旦发生故障会导致整个控制系统失灵, 进而影响到整个航天任务, 所以必须保证卫星具备自主故障诊断及故障处理的能力。
经过各国学者和专家多年的研究和论证, 目前航天器的故障诊断技术已经形成了较为完善的体系。 现阶段, 用于故障诊断的方法主要是基于模型的方法和基于人工智能的方法[3-4]。 前者通过构建被诊断对象的数学模型, 将模型计算产生的理论值与实际工作情况中的测量值作比较, 生成残差作为故障检测和辨识的依据。 但这种方法的可靠性很大程度依赖于模型的准确性, 对于一些复杂的非线性系统, 很难建立精确的数学模型。 因此专家们又提出了人工智能的故障诊断方法, 利用已有的历史数据进行训练分析, 模拟实际系统, 从而完成故障诊断任务。 如文献[5]分别利用两个递归神经网络识别卫星姿态控制系统的执行器和敏感器故障。 文献[6]利用动态神经网络模拟了反作用飞轮的运行特性, 实现了对卫星群姿态控制系统的故障检测与隔离。 文献[7]通过设计一种Mahalanobis-like距离计算神经元间距离的HBF神经网络, 并引入新的矩阵表示神经元间的相似
收稿日期: 2017-07-14
作者简介: 陈辛(1993-), 男, 黑龙江哈尔滨人, 硕士研究生, 研究方向是航天器故障诊断算法研究。
引用格式: 陈辛, 魏炳翌, 闻新. 卫星姿态控制系统执行器的故障诊断方法研究[ J]. 航空兵器, 2018( 2): 69-76.
Chen Xin, Wei Bingyi, Wen Xin. Research on Actuator Fault Diagnosis Method for Satellite Attitude Control System[ J]. Aero Weaponry, 2018( 2): 69-76.( in Chinese)
度, 用于航天器执行机构的故障重构。
而神经网络的跟踪拟合能力很大程度上取决于其网络结构。 文献[8-9]对神经网络结构的自确定进行了很多尝试, 大致包括三种主流方法: (1)先选取最小的神经网络结构, 在训练期间逐渐增加新的隐含层、 神经元, 并生成连接权值; (2)选取大型神经网络结构, 在训练过程中删除不必要的隐含层、 神经元; (3)使用一种混合方法——结构复原算法, 对神经元与隐含层进行搭建, 然后删减多余的神经元与隐含层。 文献[10]解决了单隐含层神经网络任意精度的函数拟合问题。 文献[11-12]对多隐含层神经网络提出了新的见解。 文献[13]指出的结构自适应性和功能自适应性可以提高网络自确定的性能。
结合上述研究成果及存在的问题, 本文采用一种新的神经元搭建算法, 用于确定网络完整的拓扑信息和神经元连接权值, 并结合了结构自适应与功能自适应算法, 通过最小的神经网络结构适应所有训练数据。 随着适应训练的推进, 逐漸向网络中添加隐含层与神经元, 并且着重训练未被学习的数据。 利用自组织网络训练算法, 设计了一种新型级联前馈神经网络故障诊断系统。 通过神经网络模拟PPT的运行特性, 判断其是否工作在正常状态, 最后针对PPT系统常见的两种故障进行了仿真分析, 验证了此故障诊断策略的有效性与可靠性。
1卫星姿态系统
1.1卫星姿态运动方程
卫星的姿态运动方程可以描述其绕自身质心的运动状态, 通常由两部分组成: 一部分是通过坐标变换关系得到的运动学方程, 另一部分是通过牛顿运动定律得出的动力学方程[14]。 首先通过四元数的表示方法给出卫星的运动学方程。 四元数法主要依据欧拉旋转定理, 即两个坐标系间的相对方向可以通过一个轴的旋转来表示, 同时也可避免欧拉角表示方法中出现的奇异点问题。 四元数通常包括一个标量q0以及一个矢量[q1q2q3]T, 矢量代表坐标系变换的旋转轴, 标量代表转动的角度大小。 将卫星本体坐标系转换到质心轨道坐标系的四元数设为
Q=q0+q1i+q2 j+q3k(1)
则卫星姿态运动学方程可表示为
q·=12q0
q1
q2
q3-q1
q0
q3
-q2-q2
-q3
q0
q1-q3
q2
-q1
q00
ωx
ωy
ωz(2)
其中: ωx,ωy,ωz是卫星转动角速度ω在卫星本体坐标系中的分量, 可将式(1)改写为
q·0=12(-q1ωx-q2ωy-q3ωz)
q·1=12(-q0ωx-q3ωy+q2ωz)
q·2=12(q3ωx+q0ωy-q1ωz)
q·3=12(-q2ωx+q1ωy+q0ωz) (3)
航空兵器2018年第2期陈辛, 等: 卫星姿態控制系统执行器的故障诊断方法研究文中将卫星视作刚体, 根据刚体动量矩定理, 其姿态动力学方程可描述为
T=h+ω×h=I·ω+ω×(I·ω) (4)
式中: Τ=[TxTyTz]是作用于卫星上的合外力矩, Tx,Ty,Tz分别为其在Ox, Oy, Oz上的分量; h是卫星的角动量; ω是卫星的角速度; I是卫星的转动惯量。 取卫星本体坐标系的坐标轴Ox,Oy,Oz作为其惯量主轴, 则转动惯量矩阵表示为
I=Ix
Iy
Iz(5)
其中: Ix,Iy,Iz分别代表卫星绕Ox,Oy,Oz的转动惯量。 将式(4)代入式(3)中, 并重新整理可得卫星的姿态运动学方程:
ω·x=TxIx+Iy-IzIxωyωz
ω·y=TyIy+Iz-IxIyωzωx
ω·z=TzIz+Ix-IyIzωxωy (6)
联立式(3)和式(6)即为本文所研究卫星的姿态运动方程。
1.2脉冲等离子体推进器(PPT)
卫星姿态控制系统主要由敏感器、 控制器和执行器组成。 其中执行器主要通过产生力矩来调整卫星姿态。 推进器是使用最广泛的航天器执行机构之一, 根据产生推力所需能源形式的不同, 可分为冷气推进器、 热气推进器和电推进器。 PPT作为电推进技术的一种, 具有比冲高、 体积小、 结构简单、 寿命长等优点, 是微小卫星理想的动力装置。 其可应用于轨道转移、 姿态控制、 精确编队飞行等许多推进任务。 PPT的工作原理主要是通过脉冲放电电离推进剂产生等离子体, 并在压力及电磁场作用下形成等离子体羽流, 从而完成推进作用[15]。
PPT主要分为同轴电极型和平行板电极型两种结构。 本文对一种类似于美国LES8/9任务中使用的平行板电极型脉冲等离子推进器进行研究, 其模型如图1所示, 主要由电容器、 电极板、 火花塞、 供给弹簧、 电流薄片、 固体燃料推进剂等部分组成。
图1脉冲等离子体推进器结构示意图
Fig.1Schematic diagram of PPT
目前, 针对PPT的建模方法有很多种, 如零维模型、 一维模型、 基于磁流体的动力学模型等。 本文根据文献[16]定义的PPT运行特性, 采用著名科学家Jahn提出的一维数学模型对平板PPT进行建模分析, 具体数学模型如下:
x·1(t)=x3(t)
x·2(t)=x4(t)
x·3(t)=12 L′pem0[x4(t)]2
x·4(t)=-C-1x2(t)-L·T(t)x4(t)-RTx4(t)+V0LT(t) (7)
y1(t)=m0x3(t)f
y2(t)=x4(t)(8)
式中: x1是PPT位置信息; x2是电容器电荷量; x3是速度; x4是放电电流; V0是电容器初始电压; y1是PPT产生的推力; y2是放电电流; RT=Rc+Re+Rpe+Rp; LT(t)=Lc+Le+Lpe(t)。 其中Rp和Lpe的表达式如下所示:
Rp=8.08hT34ewμ0ln1.24×107T3ene12τ(9)
Lpe(t)=μ0hwx1(t) (10)
PPT中其他参数的物理意义如表1所示。
表1脉冲等离子体推进器模型参数
Table 1Parameters of PPT model参数物理意义单位RT 电路中合计电阻 ΩLT 电路中合计电感 Hμ0 真空磁导率 Wb·A-1 ·m-1m0 t=0时刻等离子体燃料质量 kgne 电子密度m-3h 电极间距离 mw 电极板宽度 mτ 特性脉冲时间 sC 电容器内部电容 FTe 电子温度-f 脉冲频率 Hz
卫星本体坐标系中, 每个PPT产生的推力为
Fth=Fth·eth(11)
其中: eth是推力的单位向量; Fth是推力的大小。 其产生的力矩为
Tth=rth×Fth=rth×Fth·eth(12)
式中: rth为从卫星中心到PPT推力指向的距离。
2级联前馈神经网络
2.1级联前馈神经网络模型
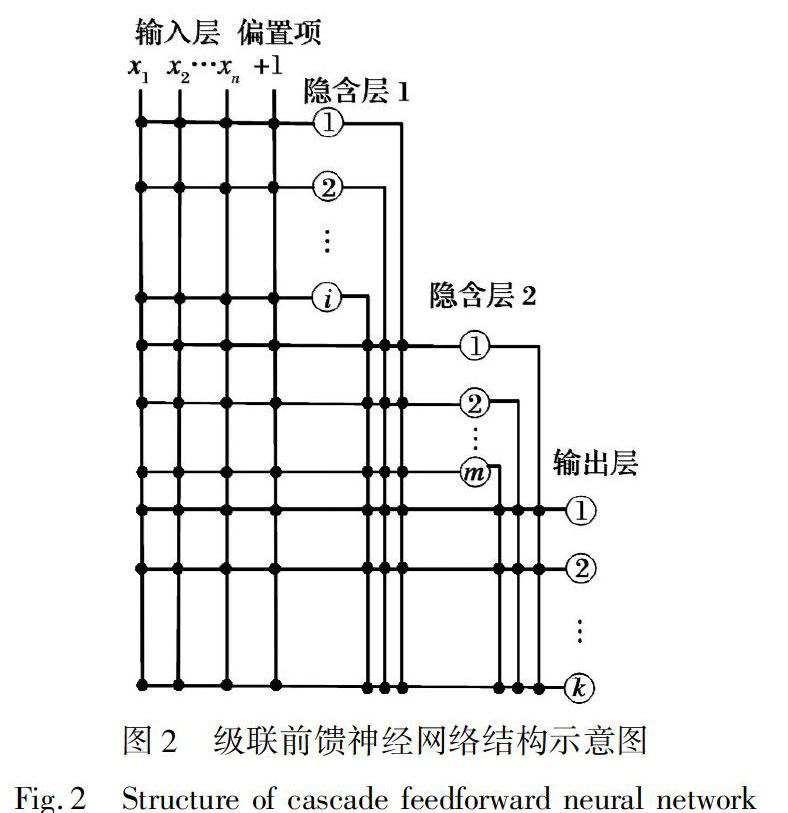
级联前馈神经网络与常见的前向神经网络结构类似, 但其输入量与每一层神经元均通过权值连接, 同时每一层神经元都与之前各层的神经元通过权值相连。 一个含有两个隐含层的级联前馈神经网络结构如图2 所示。 因每一层的神经元都图2级联前馈神经网络结构示意图
Fig.2Structure of cascade feedforward neural network
与前面所有层的神经元相关, 可更快速、 准确地完成复杂映射关系的学习训练[17]。
神经网络结构的确定是神经网络中最重要的问题之一, 本文采用一种新的神经网络构建方法, 可实现神经网络结构的自确定。 使其具有结构及功能自适应能力, 从而能更好地处理多目标自适应问题。 采用文献[18]中的神经网络搭建方法, 具有如下特点:
(1) 网络形成过程中不仅能确定总神经元的个数, 同时能够确定网络中每个隐含层神经元的个数。
(2) 隐含层神经元添加过程中, 固定已有的神经元连接权值, 同时对新神经元创建一个新的训练集。
(3) 新神经元的训练集主要用来训练之前没有训练好的数据部分。
(4) 通过训练误差与隐含层神经元的拓扑信息来设置隐含层构建的终止标准。
网络构建的主要步骤如图3所示。
图3神经网络自组织训练算法流程图
Fig.3Flow chart of neural network selforganizing training
algorithm
詳细步骤如下文所述:
(1) 最简单的三层神经网络结构包括: 隐含层、 输入层和输出层。 输入输出层的神经元个数与故障诊断系统需要诊断输入输出变量个数有关。 初始化阶段, 网络中只有一个隐含层, 里面包含一个神经元, 在小范围内随机生成神经网络的所有权值, 用标签C代表这个隐含层, 标签I代表隐含层中的单个神经元。
(2) 创建一个C隐含层的I神经元对应的新训练集。
(3) 设置训练集训练次数τ, 通过梯度下降算法进行训练, 此训练阶段为初始部分训练。
(4) 对网络进行终止标准判定, 若符合标准则神经网络训练完成; 不符合转到下一步。
(5) 计算神经网络训练集误差E, 如果训练τ次之后误差减少到η, 转到步骤(3), 代表进展顺利, 可以进一步的训练; 否则, 转到下一步。
误差E的计算公式如下:
E=100omax-ominNPt∑Ktrk=1∑mi=1Yi(k)-Zi(k)2 (13)
式中: omax与omin为输出系数的最大值和最小值; Ktr是训练集中的样本个数; m为输出神经元个数; Yi(k)与Zi(k)分别代表第i个输出神经元对于训练样本p的实际与期望输出。
(6) 对C隐含层中的I神经元的所有连接权值添加少量噪声后进一步训练。 噪声采用平均值为0、 方差为1的高斯分布。 这次训练为最终训练。
(7) 对网络进行终止标准判定, 若满足此标准, 转到步骤(11); 不符合转到下一步。
(8) 计算训练集误差E。 如果E在训练τ次后减少量为η, 则转到步骤(6)进一步训练I神经元; 如果没有达到要求, 固定神经元连接权值, 删除神经元标签, 转到下一步。
(9) 检查是否需要添加新的隐含层神经元。 如果需要, 则在C隐含层中添加一个新的神经元, 用标签I代表神经元, 并将其连接权值初始化为0, 然后转到步骤(2); 如果不需要, 删除隐含层标签并继续下一步。
(10) 在神经网络现有隐藏层的上方添加一个新的隐藏层, 并且里面仅仅包含一个神经元。 用标签C代表隐含层, 标签I代表神经元, 神经元连接权值初始化为0, 转到步骤(2)。
(11) 输出网络结构。
2.2终止准则
Etr(τ)和Eva(τ)是分别是训练τ次的训练和验证误差, Eopt(τ)是最小验证误差, 训练τ次后的泛化损失为
GL(τ)=Eva(τ)Eopt(τ)-1 (14)
因为过拟合的存在, 泛化损失超出阈值后网络训练自动停止, 然而如果Etr(τ)非常快速的下降, 很可能泛化损失起不到停止训练的作用, 系统仍然会继续训练来弥补泛化损失。
网络训练τ次中, 带宽为k的训练带的训练进展Pk(τ)用来测量一个训练带中平均训练误差大小:
Pk(τ)=Σττ′=-k+1Etr(τ′)k×minττ′=-k+1Etr(τ′)-1 (15)
其中: 带宽为k, 是一系列次数n+1,n+2, …, n+k, n可以被k整除, k一般为5。
当GL(τ)>Pk(τ)时网络停止训练, 此终止准则比阈值准则复杂, 但训练出的网络结构更加优化。 根据文献[18]中的收敛性证明, 级联前馈神经网络能够有效拟合任意函数。
3卫星姿态控制系统故障诊断
3.1卫星姿态控制策略
为了对卫星进行三轴稳定控制, 应安装六个脉冲等离子体推进器从而实现对三个坐标轴六个方向的独立控制, 对控制系统进行建模分析。 将预期姿态角和实际测量姿态角从欧拉角的形式转换为四元数的表达方式, 卫星姿态控制通过四元数中的矢量部分即可完成, 得到两者的四元数差值qe=qe1qe2qe3T。 然后将四元数差值和预期与实际角速度的差值ωe=ωexωeyωezT输入至PID控制器中, 即可得到力矩控制信号Tm。 利用脉冲等离子体推进器系统产生推力, 从而实现力矩控制, 式(16)和式(17)分别表示卫星的转矩矩阵Tt和卫星受到的合力矩Th:
Tt=Tt1,x
Tt1,y
Tt1,zTt2,x
Tt2,y
Tt2,zTt3,x
Tt3,y
Tt3,zTt4,x
Tt4,y
Tt4,zTt5,x
Tt5,y
Tt5,zTt6,x
Tt6,y
Tt6,z (16)
Th=Tt·S (17)
其中: Tta,b代表第a個推进器在b轴上产生的力矩大小; S代表控制推进器开关的二进制信号, 其表达式如下:
S=T-1t ·Tm -∑6a=1ua ·Snull,b (18)
式中: Snull,b是卫星推进器模型对应的零空间矩阵, 其控制量ua=min(T-1t·Tm)b, 如表2所示。
通过这种控制方法, 可分别通过六个推进器在三个轴六个方向上产生的力矩实现对卫星姿态的稳定性控制。
表2脉冲等离子体推进器零空间矩阵
Table 2Null space matrix for PPT configuration卫星各轴零空间矩阵数值Snull,x (110000)T Snull,y(001100)TSnull,z (000011)T
3.2卫星姿态故障诊断
本文提出的针对卫星姿态控制系统执行器的故障检测方案如图4所示。 首先, 构造级联前馈神经网络, 用正常情况下控制系统产生的力矩控制信号Tm和PPT系统的输出力矩Th作为神经网络的训练数据, 从而得到PPT系统对应的神经网络结构及参数。 将训练好的神经网络观测器加入到卫星姿态控制系统中, 对应三个坐标轴设置三个神经网络观测器, 分别检测三对推进器的工作状态。 在卫星姿态系统工作时, 同时将力矩控制信号输入到PPT系统及神经网络系统中。 通过扭矩传感器可测量得到PPT系统实际输出的力矩信号Th, 将其与神经网络输出的估计值Test做差, 即可生成用于故障诊断的残差信号。 当残差超过系统设定的阈值时, 即认定PPT发生故障, 从而完成故障诊断任务。
图4卫星姿态故障诊断系统示意图
Fig.4Schematic diagram of fault diagnosis system of satellite
其中阈值选择对整个故障诊断策略起着至关重要的作用, 若阈值选择过大则会造成漏报的情况, 若选择过小则会导致虚报和错报等问题。 在实际工作中, 空间环境等因素以及随机噪声等都会对推进器产生一定影响, 为了尽量提高故障诊断的准确性, 采取以下方法计算阈值。 通过计算残差数值的平均差与标准差可得阈值表达式[19]:
M=∑ni=1E(i)n+εmaxnM-∑ni=1E(i)n (19)
其中: E(i)是残差信号Th(i)-Test(i), i=1, 2, …, n的平均绝对误差; 系数ε是一个可调节故障诊断系统灵敏度的常数。
4仿真分析
在仿真试验过程中, 首先对PPT系统进行动力学建模, 然后搭建卫星姿态控制系统模型。 对正常情况下的系统进行仿真分析, 采集三个轴上控制器输出的力矩控制信号Tm及PPT系统的输出力矩Th 作为神经网络的训练数据。 从最简单的神经网络结构开始训练, 通过自组织算法调整神经网络结构; 梯度下降算法调节神经网络权值, 达到误差允许的范围内即停止训练。 网络训练四次的网络结构重要参数如表3所示, 包括隐含层层数与隐含神经元个数。
表3网络训练指标
Table 3Network training index训练次数训练指标第一次第二次第三次第四次隐含层层数5453隐含神经元个数23241920
利用训练好的神经网络模拟卫星姿态控制系统中的PPT系统。 由于三个坐标轴情况相同, 这里仅对x轴的情况展开分析。
设定初始时刻卫星姿态角四元数分别为0.910.070.030.28T, 目标姿态为1000T。 分别利用神经网络与PPT系统, 作为卫星姿态控制系统的执行器, 四元数中q1变化情况如图5所示。 结果表明神经网络可准确模拟PPT系统动力学特性, 闭环情况下神经网络预测效果优秀, 同时也验证了网络结构搭建算法的有效性。
正常工作情况下, 神经网络系统的输出力矩与脉冲等离子体推进器的实际产生力矩的残差如图6所示。 在开始阶段的突变是由于状态变量进行初始化时, 初始值是按照经验进行选取, 从而造成开始阶段的估计误差相对较大。 之后在卫星姿态不断调整的过程中, 残差信号始终保持在阈值范围内。
图5神经网络预测卫星姿态效果图
Fig.5Prediction result of satellite attitude by neural network
图6正常情况下预期与实际力矩残差图
Fig.6Residual signal of predicted torque and actual torque under normal condition
在实际的工作过程中, 由于PPT长期工作在环境恶劣复杂的太空环境中, 且随着工作时间的增加, 会导致其发生故障。 结合文献[20]所提出的问题, 主要考虑以下两种常见的故障情况。
故障情况1: 推进剂缺失引发的故障, 属于间歇性故障, 故障发生以后系统能够在较短时间内自我修复。 随着工作时间的增加, PPT中的弹簧反复受到冲击载荷的作用, 其弹性发生突变时, 固体推进剂燃料无法被送到正常位置。 造成推进剂质量m0减少, PPT产生的推力小于正常情况。 在仿真时, 设置x轴上的两个脉冲等离子推进器在2 s时, 推进剂质量减少50%, 卫星的残差信号如图7所示, 其中虚线代表阈值。
图7故障情况1预期与实际力矩残差图
Fig.7Residual signal of predicted torque and actual torque under fault condition 1
从图7中可以看出, 在2 s时残差信号发生突变, 在短时间内超过阈值范围, 可有效檢测到故障的发生。
故障情况2: 导电性能下降引发的故障, 属于永久性故障, 故障发生以后系统无法自我修复。 在工作过程中, PPT的导线、 电极板、 电容器等都会受到不同程度的消耗和磨损, 一旦某种器件受损程度严重, 则会造成其导电性能大幅下降, 即电阻RT的增加, 致使脉冲期间产生的放电电流低于正常值, PPT产生的推力低于容许范围。 在仿真试验中, 设置x轴上的两个脉冲等离子推进器在2.5 s时, 电路中的电阻阻值增加40%, 卫星的残差信号变化情况如图8所示。
图8故障情况2预期与实际力矩残差图
Fig.8Residual signal of predicted torque and actual torque under fault condition 2
从图8中可以看出, 在2.5 s后残差信号有明显波动, 多次超过阈值范围, 可判断卫星已处于非正常工作状态。 由于故障导致PPT系统推力减小, 力矩不能稳定输出, 控制系统无法正常调节卫星姿态。
通过以上仿真试验可见, 针对卫星姿态控制系统中PPT的两种常见故障, 所设计的故障诊断系统可快速响应、 准确报警, 也验证了这种基于神经网络故障诊断方法的有效性和可靠性。 通过此方法, 分别对y轴和z轴进行相同的试验, 均可得到准确的故障诊断结果, 无虚报、 漏报等情况发生。
5结论
针对小卫星姿态控制系统执行器脉冲等离子推进器的常见故障, 提出一种基于新型级联前馈神经网络的故障诊断系统。 通过运用自组织神经网络训练算法, 结合训练误差与拓扑信息, 优化神经网络性能, 提高了网络的结构与功能自适应能力。 仿真结果表明, 对于脉冲等离子推进器的常见故障, 所设计的故障诊断系统可精确迅速检测到故障的发生, 验证了自组织神经网络算法能有效提高级联前馈神经网络的性能, 以及该故障诊断方法的有效性与可靠性。
本文仅考虑了单故障发生情况, 没有考虑多故障同时发生情况; 此外, 现阶段小卫星普遍采用编队飞行策略, 需考虑卫星编队时的故障诊断方法, 这些问题还有待进一步完善。
参考文献:
[1] 闻新. 太空探索正在进入航天器集群时代[J]. 人民论坛·学术前沿, 2017(5): 19-26.
Wen Xin. Space Exploration is Entering the Era of Spacecraft Cluster [J]. Frontiers, 2017(5): 19-26.(in Chinese)
[2] 牛禄, 王宏伟, 杨威. 用于微小卫星推进装置的脉冲等离子体推力器[J]. 上海航天, 2004(5): 39-43.
Niu Lu, Wang Hongwei, Yang Wei. The Pulsed Plasma Thruster for Propeller in Small and Micro Satellite[J]. Aerospace Shanghai, 2004(5): 39-43. (in Chinese)
[3] Venkatasubramanian V, Rengaswamy R, Yin K, et al. A Review of Process Fault Detection and Diagnosis: Part I: Quantitative ModelBased Methods[J]. Computers & Chemical Engineering, 2003, 27(3): 293-311.
[4] Venkatasubramanian V, Rengaswamy R, Kavuri S N. A Review of Process Fault Detection and Diagnosis: Part II: Quanlitative Models and Search Strategies[J]. Computers & Chemical Engineering, 2003, 27(3): 313-326.
[5] Talebi H A, Khorasani K, Tafazoli S. A Recurrent NeuralNetworkBased Sensor and Actuator Fault Detection and Isolation for Nonlinear Systems with Application to the Satellites Attitude Control Subsystem[J]. IEEE Transactions on Neural Networks, 2009, 20(1): 45-60.
[6] Mousavi S, Khorasani K. Fault Detection of Reaction Wheels in Attitude Control Subsystem of Formation Flying Satellites: A Dynamic Neural NetworkBased Approach[J]. International Journal of Intelligent Unmanned Systems, 2014, 2(1): 2-26.
[7] Wen Xin, Zhang Xingwang, Zhu Yaping. Design of Fault Detection Observer Based on Hyper Basis Function[J]. Tsinghua Science and Technology, 2015, 20(2): 200-204.
[8] Han S J, Cho S B. Evolutionary Neural Networks for Anomaly Detection Based on the Behavior of a Program[J]. IEEE Transactions on Systems Man & Cybernetics, Part B, 2005, 36(3): 559-570.
[9] Islam M, Sattar A, Amin F, et al. A New Adaptive Merging and Growing Algorithm for Designing Artificial Neural Networks[J]. IEEE Transactions on Systems Man & Cybernetics, Part B, 2009, 39(3): 705-722.
[10] Hornik K, Stinchcombe M, White H. Multilayer Feedforward Networks are Universal Approximators[J]. Neural Networks, 1989, 2(5): 359-366.
[11] Sattar A, Islam M, Murase K. A New Constructive Algorithm for Designing and Training Artificial Neural Networks[M]. Heidelberg: SpringerVerlag, 2007: 317-327.
[12] Larochelle H, Erhan D, Courville A, et al. An Empirical Evaluation of Deep Architectures on Problems with Many Factors of Variation[C]∥The TwentyFourth International Conference on Machine Learning, Corvallis, USA, 2007: 473-480.
[13] Ma L Y, Khorasani K. Constructive Feedforward Neural Networks Using Hermite Polynomial Activation Functions[J]. IEEE Transactions on Neural Networks, 2005, 16(4): 821-833.
[14] 周軍.航天器控制原理[M].西安: 西北工业大学出版社, 2001: 44-46.
Zhou Jun. The Principle of Spacecraft Control[M]. Xian: Northwestern Polytechnic University Press, 2001: 44-46. (in Chinese)
[15] 邓健. 脉冲等离子体推进器脉冲电源及推进剂烧蚀特性的实验研究和数值分析[D]. 南京: 南京理工大学, 2012.
Deng Jian. Experimental Research and Numerical Analysis of Pulsed Plasma Thruster Power Supply and the Ablative Characteristics of Characteristics Propellant [D]. Nanjing: Nanjing University of Science and Technology, 2012. (in Chinese)
[16] Laperriere D D. Electromechanical Modeling and OpenLoop Control of ParallelPlate Pulsed Plasma Microthrusters with Applied Magnetic Fields [D]. Massachusetts: Worcester Polytechnic Institute, 2005: 51-55.
[17] Thatoi D, Guru P, Jena P K, et al. Comparison of CFBP, FFBP, and RBF Networks in the Field of Crack Detection[J]. Modelling & Simulation in Engineering, 2014(2): 3.
[18] Islam M, Sattar A, Amin F, et al. A New Constructive Algorithm for Architectural and Functional Adaptation of Artificial Neural Networks.[J]. IEEE Transactions on Systems Man & Cybernetics, Part B, 2009, 39(6): 1590-1605.
[19] Kiakojoori S, Khorasani K. Dynamic Neural Networks for Gas Turbine Engine Degradation Prediction, Health Monitoring and Prognosis[J]. Neural Computing & Applications, 2016, 27(8): 2157-2192.
[20] Hoskins W A, Cassady R J. ARC Discharge Initiation for a Pulsed Plasma Thruster: US, 6373023[P]. 2002.
Research on Actuator Fault Diagnosis Method for
Satellite Attitude Control System
Chen Xin1,2, Wei Bingyi2, Wen Xin2
(1. Beijing Aerospace Automatic Control Institute, Beijing 100854, China;
2.College of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
Abstract: Small satellites have the advantages of low cost, small size and high flexibility. Many small satellites that work together to accomplish space exploration missions has become one of the focuses of international space technology development. Aiming at the common faults of the satellite attitude control system with a pulsed plasma thruster (PPT) as an actuator, a fault diagnosis system based on a new cascade feedforward neural network is presented. Using selforganizing neural network training algorithm, combining training error and topology information, the neural network structure is optimized and its generalization performance is improved. Then, the neural network is used to simulate the dynamic characteristics of PPT, and fault diagnosis is carried out. Simulation results show that the training algorithm can effectively improve the network comprehensive capability and enhance the validity and reliability of the fault diagnosis strategy.
Key words: small satellite; attitude control; neural network; fault diagnosis; PPT1Polarization; interference rejection; phased array radar
