基于多帧积累的海面弱小慢速目标检测算法
2018-06-19王雅陶海红代品品柳阳
王雅 陶海红 代品品 柳阳

摘要: 在复杂的海杂波环境中, 海面弱小慢速目标检测技术一直是雷达领域中的一项重点。 由于以往采用的单帧数据检测海面弱小慢速目标容易产生较高的虚警率, 所以本文联合多帧雷达回波数据, 在基于十字窗改进的多帧积累算法上进行算法改进, 减少了一个处理块来抑制海杂波从而检测海面弱小慢速目标, 降低了算法的运算复杂度, 增加了算法的可靠性与有效性, 最后通过对实测海杂波数据进行算法仿真验证, 表明了该算法的可行性和有效性。
关键词: 海杂波抑制; 弱小慢速目标检测; 多帧积累; 十字窗; 多帧数据
中图分类号: TJ760.1; TN911.7文献标识码: A文章编号: 1673-5048(2018)02-0043-06
0引言
随着海洋环境的日益复杂, 海洋的武器平台也在不断增加, 因此对海事雷达探测性能的要求也越来越高。 而在极其复杂的海面环境条件下, 检测湮没在强海杂波中的弱小慢速目标一直是雷达对海探测研究的热点与难点。 海事雷达接收到的回波中不仅仅包含目标信号, 更多的是海杂波以及噪声信号, 在强海杂波环境中回波的信杂比是非常低的, 通常都为负值, 具有较低的可观测性, 而且杂波也是复杂非均匀的, 因此负的信杂比条件下检测海面弱小目标变得非常困难。 本文在多帧积累抑制海杂波算法的基础上将算法进一步改进, 提出一种新的多帧积累的海面弱小慢速目标检测算法, 降低了算法的运算复杂度。 并将算法应用于实测海杂波数据中进行算法仿真验证, 有效地抑制了海杂波从而检测出海面弱小慢速目标。
众所周知, 海洋环境远远比其他环境的杂波复杂[1], 因此海事雷达在海面检测目标的背景不仅仅是常见的三类背景即均匀背景、 杂波边缘背景和多目标环境中的任意一个单一的背景[2], 而是非常容易受云雨、 海尖峰、 陆地、 海面温度以及洋流等因素影响的复杂背景。 对于海杂波而言, 使用常规的杂波抑制[3]方法如动目标显示(MTI)算法[4]、 单帧恒虚警检测算法[5-6]等很难对其进行有效抑制。 基于此, 本文采用多帧积累的检测算法实现对海杂波的抑制从而检测出海面弱小慢速目标, 通过对实测数据的处理和性能分析验证了所提算法的可行性和有效性。
1目前存在问题
由于海洋环境的复杂性, 海杂波的非均匀性以及多变性使海面弱小慢速目标表现出低可观测性, 增加了海事雷达检测的难度。 而以往的杂波抑制算法对于海杂波的抑制大多也是失效的。 当杂波与目标的多普勒速度相近时, MTI算法的杂波抑制效果并不理想, 因為MTI算法主要用来抑制静止和慢速杂波, 但是海杂波会受到许多自然因素
收稿日期: 2017-08-21
基金项目: 西安电子科技大学基本科研业务费项目(BYD061428)
作者简介: 王雅(1992-), 女, 天津人, 硕士研究生, 研究方向为雷达信号处理。
引用格式: 王雅, 陶海红, 代品品, 等. 基于多帧积累的海面弱小慢速目标检测算法[ J]. 航空兵器, 2018( 2): 43-48.
Wang Ya, Tao Haihong, Dai Pinpin, et al. Weak and Slow Targets Detection Algorithm for Sea Surface Based on MultipleFrame Accumulation[ J]. Aero Weaponry, 2018( 2): 43-48. ( in Chinese)的影响, 是一种具有动态特性的复杂杂波。 除此之外, 比较常见的单帧恒虚警检测算法在强海杂波条件下,在信杂比较低、 海面弱小慢速目标的可观测性很差的时候会造成很高的虚警率, 因此也不适用于海面弱小慢速目标的检测;若直接采用分数阶傅里叶变换(FRFT)[7-9]的方法在较低的信杂比条件下比较容易失效;还有不少学者采用分形[10-11]的方法进行海杂波背景下目标的检测问题, 但是分形方法无法获得目标的运动信息。 多帧数据[12]联合处理能更准确地检测出海面目标。 因此, 按照目前研究情况来看, 寻找适用性强而且低复杂度的算法进行海面弱小慢速目标的检测是一直努力和探索的方向。
2算法描述
2.1基于十字窗改进的多帧积累算法
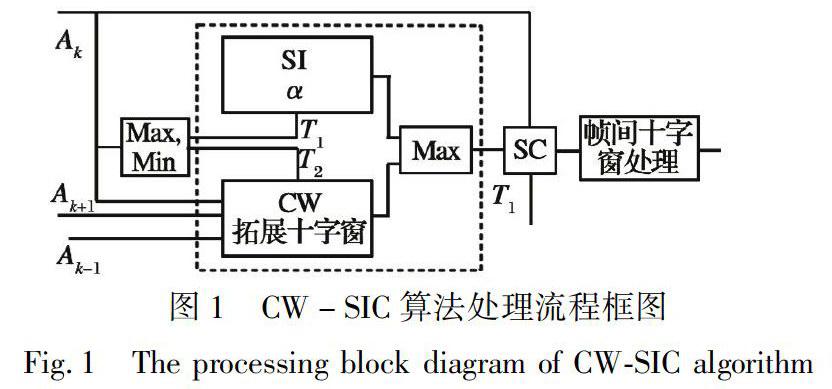
基于十字窗改进的多帧积累(CW-SIC)算法首先通过两个通道即SI通道[13]和CW通道对数据进行处理, 然后将处理后的数据使用扫描相关(SC)算法进一步处理, 最后通过过门限以及帧间十字窗处理的方法来实现检测低速运动目标的目的。 其中SI通道主要是通过对信号进行加权达到抑制海杂波的目的, 而CW通道主要是利用海杂波在帧间的非相关性与海面弱小慢速目标在帧间的强相关性的原理来检测海杂波中的所有目标回波, 达到检测目标的效果。 CW-SIC算法的处理框图如图1所示。
图1CW-SIC算法处理流程框图
Fig.1The processing block diagram of CWSIC algorithm
2.1.1SI通道
SI通道最主要目的是抑制海杂波, 原理是通过对当前帧的数据处理单元(i, j)的扫描幅度Aij与前一帧的数据处理单元的历史加权幅度Aij,old进行加权求和, 将合成的加权扫描幅度Aij,new作为下一次扫描加权处理的“旧”值, 即Ak+1,old=Ak,new, 其中k代表帧数。 根据经验, 将加权因子[14]设为α0<α<1。 传统SI算法按下式对帧间数据进行积累:
Aij,new=(1-α)Aij,old+αAij(1)
2.1.2CW通道
CW通道的原理是假设当前帧的数据处理单元(i, j)的幅度值为Aij, 则在其前一帧与后一帧数据中分别以数据处理单元(i, j)为中心拓展形成一个十字窗, 因为低速运动的弱小目标运动速度较低, 所以相邻帧基本不会跨跃很大的距离单元和方位, 因此如果该帧的目标在数据处理单元(i, j)处, 则在其前一帧与后一帧数据中以数据处理单元(i, j)为中心形成的拓展十字窗中也会有目标存在。 根据这个原理可以大概率的检测出目标并且能有效抑制部分海杂波。
2.1.3SC算法[15]
航空兵器2018年第2期王雅, 等: 基于多帧积累的海面弱小慢速目标检测算法SC算法的主要目的是检测目标, 在经SI通道与CW通道处理后的数据data_max中提取有效回波, 实现目标检测, 同时去掉传统SI算法处理后带来的动目标 “尾巴”现象, 减少海杂波的尖峰数目。 SC算法简单来说是一个逻辑处理问题, 假设第k帧的数据处理单元(i, j)的幅度为data{k}(i, j), 假如data{k}(i, j)超过阈值门限T2, 而且其对应的data_max{k}(i, j)的幅度也超过阈值门限T1, 则输出data_max{k}(i, j), 否则就置零输出。
2.2基于SI通道改进的多帧积累算法
基于SI通道改进的多帧积累(NCW-SIC)算法主要通过对基于十字窗改进的多帧积累算法的SI通道进行算法改进, 利用多帧数据进行海杂波抑制从而达到检测低速运动的弱小目标的目的。
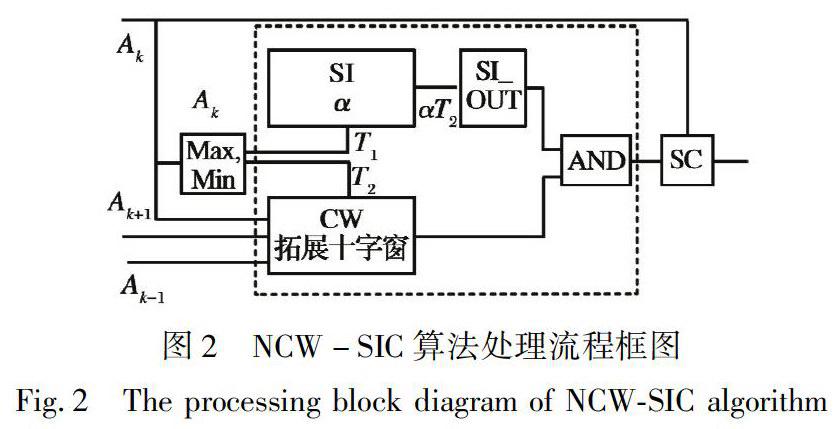
NCW-SIC算法首先通过两个通道即NSI通道和CW通道进行数据处理, 然后将处理后的数据使用SC算法进一步处理, 以此实现检测低速运动目标的目的。 NCW-SIC算法具体的处理框图如图2所示。
图2NCW-SIC算法处理流程框图
Fig.2The processing block diagram of NCWSIC algorithm
CW通道的主要目的是输出海杂波中的所有目标回波。 处理方法与CW-SIC算法中的CW通道的处理方法相同。
NSI通道是对传统SI算法改进而来的, 主要作用是抑制海杂波, 根据经验[15], 为了更好地抑制海杂波, 传统SI算法中的加权因子α选取为α<0.5。 NSI在传统SI算法处理之后增加了一步杂波抑制处理, 从而增加了原先SI通道杂波抑制的强度, 使海面弱小慢速目标有更高的检测概率。 根据式(1)可以看出经过传统SI算法处理之后, 目标回波被衰减为原来的α倍, 而在CW通道中目标都被输出而且幅度没有增大或者衰减, 所以在NSI通道中目标幅度应该不小于αT2的大小。 因此在NSI通道经过传统SI算法处理之后的目标与杂波均存在的数据中, 若经过传统SI算法处理后幅度超过αT2时则判断该点为目标, 否则就置零输出。
最后将经过NSI通道和CW通道处理后的数据进行一个逻辑“与”的操作, 将两通道處理后的数据经过SC算法处理后即可得到经过NCW-SIC算法处理后的结果图。
2.3阈值门限的选取
由于海杂波并不是均匀分布的, 因此较难提前给出海杂波的阈值门限, 同样也不能将阈值门限设为一个固定的值。 但是小范围内的海杂波可以近似为均匀分布的, 因此在CW-SIC算法中涉及到的两个阈值门限T1和T2, 本文均采用对每帧数据进行分块处理的方法来求取阈值门限, 就是将整帧数据看做一个大的矩形块, 并将其平均分为若干个小的矩形块。 NSI通道的门限T1的选取方法是去掉小矩形块中的两个最小值, 然后对剩下的值取平均求得; CW通道的门限T2的选取方法是将每个小矩形块中的最大值与最小值剔除掉, 最后对剩余数据求取平均值。
2.4NCW-SIC算法的具体步骤
(1) 所用实测海杂波数据为对脉冲多普勒雷达的回波进行脉冲压缩处理后的M帧多普勒雷达回波数据, 先使用SI算法对M帧数据进行处理, 将处理后的数据保存, 记作SI{k}, 然后根据2.3节阈值门限的选取方法求出其阈值门限T1。
(2) 假设选取第k帧数据作为检测数据, 首先求出该帧的阈值门限T2; 然后将数据经过CW通道进行处理; 最后将经过拓展十字窗处理后的第k帧数据结果保存, 记作CW{k}。
(3) 将SI{k}(i, j)的幅值与步骤(2)中求出的阈值门限T2{k}(i, j)的α倍αT2{k}(i, j)作比较, 若SI{k}(i, j)>=αT2{k}(i, j), 则暂时判定该点为目标, 否则就置零输出, 输出结果记作SI_OUT{k}, 然后将SI_OUT{k}(i, j)与CW{k}(i, j)的值进行“与”操作, 将满足上述条件的数据保存为NCW{k}。
(4) 将NCW{k}与第k帧未经处理过的数据使用SC算法进行处理, 若第k帧数据处理单元(i, j)的幅度Ak(i, j)大于其对应的阈值门限T2{k}(i, j), 而且数据处理单元(i, j)的幅度NCW{k}(i, j)也大于其阈值门限T1{k}(i, j), 则输出数据NCW{k}(i, j)的值, 否则就置零输出, 最后将得到的数据记作data_end{k}, 并且画出目标航迹图。
对比图1~2, 可以看出NCW-SIC算法处理起来更加简单方便, 比CW-SIC算法少了一个帧间十字窗处理的模块, 大大降低了算法的复杂度。 对于NCW-SIC算法来说, 在上通道中只增加了一个CW-SIC过门限的处理, 其复杂度比起算法中的帧间十字窗处理简单很多, 假设一帧数据包括10个距离单元10个脉冲, 那么对于NCW-SIC算法中的SI_OUT的复杂度是100, 但是对于CW-SIC算法中的帧间十字窗处理来说就大得多, 比如选择的十字窗长和宽均为3, 那么经过帧间十字窗处理后的复杂度为256, 所以可以明显看出NCW-SIC算法比CW-SIC算法的复杂度要低, 说明了NCW-SIC算法经过改进后更有效, 也更易于工程实现。
3仿真实验和性能分析
仿真实验所用的两组数据均为某海域实测海杂波数据, 第一组数据包含25帧数据, 海杂波不是很强; 另一组数据包含27帧数据, 但是海杂波相对于第一组数据来说强了很多, 该数据中均含有两个小目标, 这两个目标是敞篷小船拉着一个易拉罐, 如图3为导航设备录取时的PPI视频图片。 小目标在海面上运动情况的图片见图4。 对两组数据具体的仿真效果见图5~11。
图3导航设备录取时PPI视频
Fig.3PPI video when navigation equipment accepts data
假设目标的能量为S, 杂波与噪声的能量为C+N, 则信杂噪比可以表示为SCNR=S/(C+N)。 所取第2组数据的第23帧数据原始的信杂噪比为-21.95 dB。 该信杂噪比的计算均是在弱小慢速目标检测成功后通过对实测海杂波数据中的信号能量与其周围杂波及噪声平均能量的比值得到的,所以该数据是比较真实的。 如果想在该低信杂比情况下检测出目标是相当困难的。 但是实测海杂波数据经过NCW-SIC算法处理后两个小目标均检测出来, 可以看到信杂噪比得到明显的提高, 表明了NCW-SIC算法的有效性, 具体仿真结果如图6, 8, 11所示。
图5~6为对第一组海杂波较弱的实测数据进行的仿真实验; 图7~8为对第二组较强的实测海杂波数据进行的仿真实验。 从图6与图8两张结果图均可以明显看出两个小目标, 而且海杂波也被图4小目标在海面运动情形
Fig.4The movement of small targets in the sea
图5第7帧数据
Fig.5Data of the 7 frame
图6第7帧数据经过NCW-SIC算法处理结果图
Fig.6The 7 frame data are processed by NCWSIC algorithm
图7第23帧数据
Fig.7Data of the 23 frame
图8第23帧数据经过NCW-SIC算法处理结果图
Fig.8The 23 frame data are processed by NCWSIC algorithm
明显的抑制了, 表明NCW-SIC算法对海杂波抑制与海面弱小慢速目标的检测均具有明显效果, 表现出该算法的有效性与可靠性。
图9为对第一组海杂波数据的第7帧数据采用SIC算法处理后的结果图。 在图9中发现目标并未找到, 目标依然湮没在了海杂波中, 表明使用传统SIC算法的处理效果并不理想; 图10是未经处理的第二组强杂波数据的27帧数据的原始航迹图,从该图可以发现由于杂波太强根本看不出目标的轨迹, 小目标完全湮没在海杂波中; 图11是第二组数据经过NCW-SIC算法处理后的27帧数据 图9第7帧数据经过传统SIC算法处理结果图
Fig.9The 7 frame data are processed by conventional SIC
algorithm
的航迹图, 海杂波抑制效果比较明显, 目标航迹图较清晰, 均表明了NCW-SIC算法是可行的。
图1027帧数据叠加处理的目标航迹
Fig.10Target track of 27 frames data by superimposition processing
图1127帧数据经过NCW-SIC算法处理后航迹图
Fig.11Target track of 27 frames data by NCWSIC algorithm processing
4结论
通过对实测海杂波数据的处理, 从处理结果上表明了基于多帧积累的海面弱小慢速目标检测算法的可行性与有效性。 NCW-SIC算法与CW-SIC算法的性能对比结果表明了新算法对于海杂波抑制与海面弱小慢速目标的检测更有效。 NCW-SIC算法通过对算法中的SI通道的改进降低了算法的复杂度, 使NCW-SIC算法更利于工程的实现。 基于此, 本文提出的基于多帧积累的海面弱小慢速目标检测算法对于海杂波抑制与海面弱小慢速目标的检测均具有更好的效果, 降低了算法的复杂度使算法更加高效可靠, 利于工程实现。
参考文献:
[1] 何友, 黄勇, 关键, 等. 海杂波中雷达目标检测技术综述[J]. 现代雷达, 2014, 36(12): 1-9.
He You, Huang Yong, Guan Jian, et al. An Overview on Radar Target Detection in Sea Clutter[J]. Modern Radar, 2014, 36(12): 1-9.(in Chinese)
[2] 何友, 修建娟, 關欣, 等. 雷达数据处理及应用[M]. 3版. 北京: 电子工业出版社, 2013: 2-6.
He You, Xiu Jianjuan, Guan Xin, et al. Radar Data Processing with Application[M]. 3rd ed.Beijing: Publishing House of Electronics Industry, 2013: 2-6.(in Chinese)
[3] 赵翠. 海杂波特性及其抑制技术的研究[D]. 成都:电子科技大学, 2014: 48-57.
Zhao Cui. Research on Characteristics and Suppression Technology of Sea Clutter[D]. Chengdu:University of Electronic Science and Technology of China, 2014: 48-57.(in Chinese)
[4] 吴顺君, 梅晓春. 雷达信号处理和数据处理技术[M]. 北京:电子工业出版社, 2008: 115-127.
Wu Shunjun, Mei Xiaochun. Radar Signal Processing and Data Processing Technology[M]. Beijing: Publishing House of Electronics Industry, 2008: 115-127.(in Chinese)
[5] 何友, 关键, 彭应宁,等. 雷达自动检测与恒虚警处理[M]. 北京:清华大学出版社, 1999: 10-22.
He You,Guan Jian, Peng Yingning, et al.Automatic Radar Detection and CFAR Processing[M]. Beijing: Tsinghua University Press, 1999: 10-22.(in Chinese)
[6] 何友, 關键, 孟祥伟, 等. 雷达自动检测和CFAR处理方法综述[J]. 系统工程与电子技术, 2001, 23(1): 9-14.
He You, Guan Jian, Meng Xiangwei, et al. Survey of Automatic Radar Detectionand CFAR Processing[J]. Systems Engineering and Electronics, 2001, 23(1): 9-14.(in Chinese)
[7] 刘建成, 刘忠, 王雪松, 等. 高斯白噪声背景下的LFM信号的分数阶Fourier域信噪比分析[J]. 电子与信息学报, 2007, 29(10): 2337-2340.
Liu Jiancheng, Liu Zhong, Wang Xuesong, et al. SNR Analysis of LFM Singal with Gaussian White Noise in Fractional Fourier Transform Domain[J].Journal of Electronics and Information Technology, 2007, 29(10): 2337-2340.(in Chinese)
[8] 陶然, 张峰, 王越. 分数阶Fourier 变换离散化的研究进展[J]. 中国科学, 2008, 38(4): 481-503.
Tao Ran, Zhang Feng, Wang Yue. Study Evolution of Discrete Fractional Fourier Transform[J]. Science in China, 2008, 38(4): 481-503.(in Chinese)
[9] 郭海燕, 董云龙, 关键. 基于分数阶模糊函数的海面运动弱目标检测[J]. 系统工程与电子技术, 2011, 33(6): 1212-1216.
Guo Haiyan, Dong Yunlong, Guan Jian. Weak Target Detection of Sea Surface Motion Based on Fractional Ambiguity Function[J]. Systems Engineering and Electronic Technology, 2011, 33 (6): 1212-1216.(in Chinese)
[10] 刘宁波, 关键. 海杂波的多重分形判定及广义维数谱自动提取[J]. 海军航空工程学院学报, 2008, 23(2): 126-131.
Liu Ningbo, Guang Jian. Judgement of Multifractal AutoComputing of Generalized Dimension Spectrum Based on Sea Clutter[J]. Journal of Naval Aeronautical and Astronautical University, 2008, 23 (2): 126-131.(in Chinese)
[11] 承德保, 胡风明, 杨汝良. 利用改进分形特征对SAR图像目标检测方法的研究[J]. 电子与信息学报, 2009, 31(1): 164-168.
Cheng Debao, Hu Fengming, Yang Ruliang. Study on Target Detection in SAR Images Using Improved Fractal Features[J]. Journal of Electronics and Information Technology, 2009, 31 (1): 164-168.(in Chinese)
[12] 赵元瑞. 基于多帧数据的弱小目标检测与跟踪算法研究[D]. 西安: 西安电子科技大学, 2015: 28-36.
Zhao Yuanrui. Study on Weak Targets Detection and Tracking Algorithms Based on MultiFrame Data[D]. Xian: Xidian University, 2015: 28-36.(in Chinese)
[13] Zhao Haibo, Hu Guangrui, Xu Xiaoxi. Application of ScantoScan IntegrationCorrelation to Detection of Small FastMoving Target on Sea Surface[J]. Journal of Shanghai University(English Edition), 2005, 9(4): 349-353.
