桥梁动态称重精度的影响因素研究
2018-05-23袁东
袁 东
(陕西省土地工程建设集团有限责任公司,陕西 西安 710075)
0 引言
结构动力学有两类反问题,一是模态和结构参数辨别以及结构模型的修正;二是对桥梁结构动态荷载进行反算。由于对结构矩阵逆运算是病态的,因此对动态荷载反算时,荷载值与真实值误差较大[1]。毛玉明[2]、梅立泉等人[3]将正则化方法引入到载荷识别,取得了较好的效果。同时,在结构的响应测试时,还有许多因素对测试结果产生影响。本文以MATLAB为工具,输入已知的车—桥系统参数,首先对移动时变力、车桥相互作用进行分析,然后在数值分析时加入各级环境噪声,从而分析测点数与模态数、正则化参数、模态参数误差、桥面不平度以及车速等因素对荷载识别结果的影响。
1 正则化的一般理论
正则化方法能够很好地解决不适定问题,其根本原则是,尽可能的保证近似解的稳定性,从而保留正则化解的基本信息。为了达到上述目的,近似解进行求解是正则化法的基本方法[4]。在进行反问题研究时关键在于如何建立有效的正则化方程组。
正则化的主要内容:约束最小化经验误差函数,约束有引导作用,在对误差函数进行解析时,正则化方法会使约束的梯度减少,这样会得出参数值量级小的解[6]。另外一个重要的方面,该方法可以将反问题的不适定性进行较好的处理,只要选择合适的正则化方法,即使试验中的样本数较少,求出的解也会贴近真实解[7]。
2 桥梁动态称重结果的影响因素
2.1 正则化参数的影响
已知车、桥的参数,车辆的前、后轴间距4.27 m,以72 m/h匀速移动,两荷载值表达式为:
(1)
目前Tikhonov(吉洪诺夫)正则化的应用比较广泛,对反问题的求解效果也较好。对上述函数取极小值:
Pλ=min{
(2)
其中,Pλ为正则化解;λ为正则化参数,由λ对Pλ的稳定性进行控制。
Tikhonov正则化的标准公式:
(STS+λ2I)Pλ=STR
(3)
其中,解Pλ=(STS+λ2I)-1STR。
上式的奇异值分解形式为:
(4)

表1~表3为荷载识别结果。

表1 λ=0.1时在不同响应噪声条件下荷载识别误差

表2 λ=1时在不同响应噪声条件下荷载识别误差
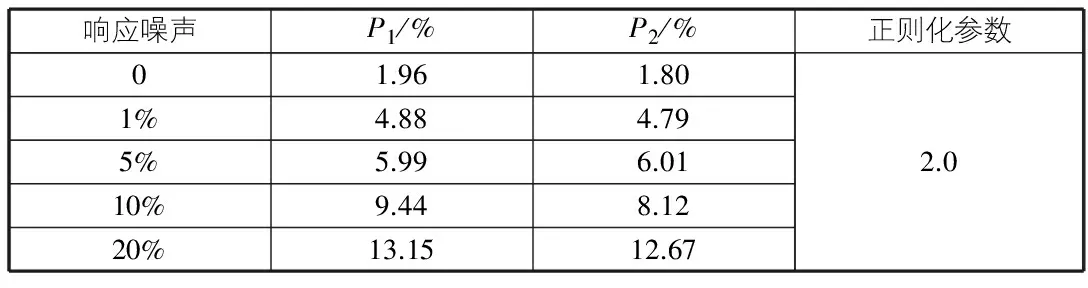
表3 λ=2.0时在不同响应噪声条件下荷载识别误差
正则化参数的计算比较复杂,若想获得最佳的正则化效果,须将正则化参数控制在0.08~2。因此,本文在计算时,取λ=0.1,1,2.0,针对不同的噪声水平,采取不同的正则化参数,得出相应的分析结果。研究发现,轴重识别结果的准确性与稳定性在很大程度上受正则化参数的影响。正则化参数的取值适当,则荷载识别结果越精确,同时减小噪声对识别结果的影响,当正则化参数取1时,识别结果最精确。
2.2 测点数与模态数的影响
传感器的位置与数量对荷载识别也有一定影响。为了验证影响的关系,在简支梁桥布置4个~8个测点,分别对响应模态数和识别模态数进行分析,模拟1%,5%两种噪声。同时将正则化参数λ设为1,便于分析比较。

表4 噪声γ为1%时由测点数引起的荷载识别误差

表5 噪声γ为5%时由测点数引起的荷载识别误差
表4,表5证明,测点数越多则荷载识别误差越小,这是因为测点数多,仪器设备所收到的动态响应越接近真实值,测试的结果越准确。
荷载识别结果与响应计算模态和识别模态数均有一定的关系,为了验证上述关系,在简支梁桥上布置7个测点,提取响应前7阶模态,同时加入1%,5%,10%的噪声。得到如表6~表8所示数据。

表6 噪声γ为1%时由测点模态数引起的荷载识别误差

表7 噪声γ为5%时由测点模态数引起的荷载识别误差
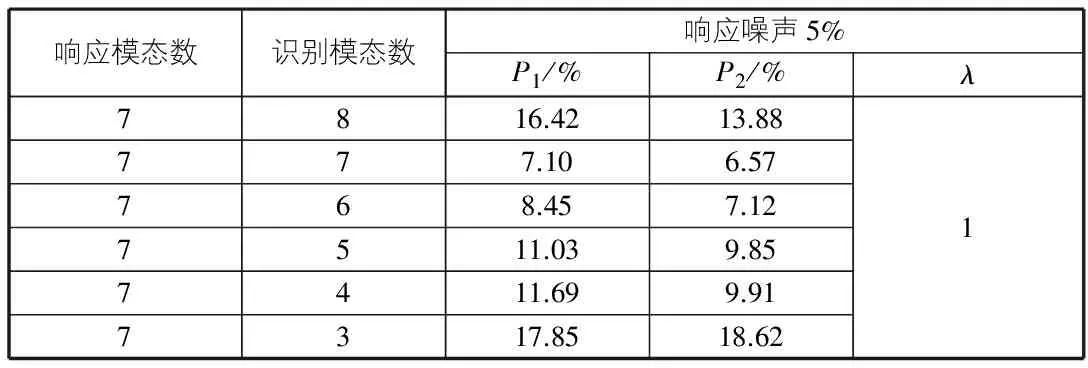
表8 噪声γ为10%时由测点模态数引起的荷载识别误差
表6~表8证明,荷载识别结果受识别模态数的影响也较大,等效脉冲荷载引起了桥梁振动,提取了高阶振型,当识别模态的频带覆盖荷载频带时,误差较小。当荷载响应模态数等于识别模态数,误差最小。
2.3 模态参数误差的影响
模态参数误差对荷载识别也有一定的影响,本文对实测值进行模拟,研究模态参数误差对识别结果的影响程度(见表9,表10)。
从表9,表10中可以看出在响应噪声水平为1%的情况下,当模态参数误差由1%增大到5%时,荷载识别误差由7.82%增大到22.98%,增大了193.9%。

表9 1%的模态参数误差β对荷载识别误差的影响
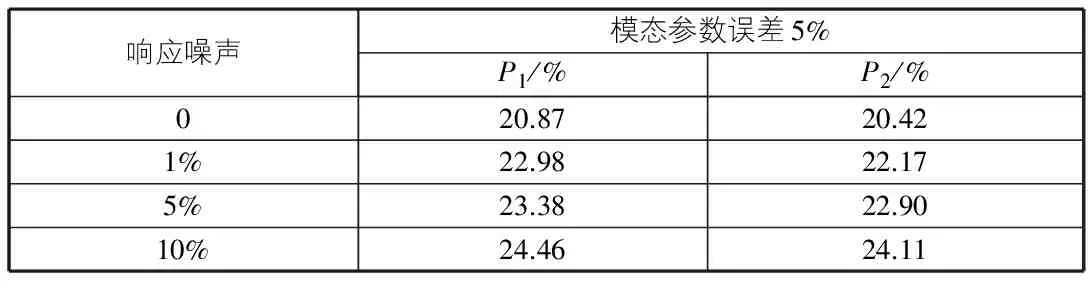
表10 5%的模态参数误差β对荷载识别误差的影响
在模态参数误差为1%的情况下,当响应噪声水平由1%增大到5%时,荷载识别误差由7.82%增大到9.56%,增大了22.2%。
所以,模态参数误差对识别结果影响是很大的,而噪声水平对识别结果的影响相对较小。
3 结语
本文着重介绍了正则化方法,通过数值模拟,联合吉洪诺夫正则化与动态称重算法,获得了较好的试验结果。同时在模拟时调整了一系列影响参数,最终得到以下结论:
1)通过动态称重,可以对桥上移动荷载产生的动力响应进行荷载识别。
2)正则化方法是解决反问题的行之有效的方法,识别结果较稳定,受噪声影响小。
3)布置的测点多,则荷载识别误差小。响应模态数与识别模态数相等的情况下,识别误差达到最小值。
4)模态参数误差对荷载识别结果的影响相对较大。
参考文献:
[1] 袁向荣,陈恩利,陈鸿天.由响应识别移动荷载[J].工程力学,1997,14(4):89-97.
[2] 毛玉明,郭杏林,吕洪彬.动载荷反演问题的正则化求解[A].第18届全国结构工程学术会议论文集第Ⅰ册[C].2009.
[3] 梅立泉,崔维庚.面载荷识别的TSVD正则化方法[J].应用力学学报,2010,27(1):29-36.
[4] P.Griffiths.Introduction to Algebraic Curves[Z].
[5] 王彦飞.反演问题的计算方法及其应用[M].北京:高等教育出版社,2007.
[6] 尹秀玲. 解线性不适定问题的几类正则化方法[D].上海:上海大学硕士论文,2005.
[7] Latt’es R, Lions J L. The method of quasi-reversibility: applications to partial dierential equations. Elsevier, New York,1969.
