弓网相互作用时受电弓关键部件动载荷研究
2018-04-27王江文梅桂明李瑞平李锐峰西南交通大学牵引动力国家重点实验室四川成都6003军械工程学院电子与光学工程系河北石家庄050003
王江文 , 梅桂明 , 李瑞平 , 邹 栋 , 周 宁 , 李锐峰(. 西南交通大学 牵引动力国家重点实验室,四川 成都 6003;. 军械工程学院 电子与光学工程系,河北 石家庄 050003)
受电弓是保障列车安全运行的关键部件之一[1]。为提高计算效率,弓网系统动力学领域常用受电弓两质量块、三质量块等简单线性化归算模型,但此类模型不能反映受电弓各部件间内力变化,而受电弓模型本身属于非线性结构,应用其非线性模型研究弓网耦合动力学是非常必要的。近年来,国内外诸多学者针对受电弓非线性模型及其应用开展了大量研究[2-12],却很少关注受电弓在运行条件下各部件间动态相互作用载荷及其传递过程。为深入研究受电弓与接触网的耦合作用过程中,受电弓各部件所承受的主要载荷特性,本文采用基于相对坐标系[13-17]的受电弓多刚体模型详细分析受电弓服役过程中各部件主要载荷情况,为受电弓设计以及强度分析提供参考依据。
1 计算模型与方法
1.1 受电弓模型
受电弓由弓头、上臂杆、下臂杆、拉杆、平衡杆、平衡臂等部件组成,各主要部件通过铰接形成四连杆机构。针对这种非树系统结构,采用铰切割方法将其处理成树系统,并建立该系统的约束方程,基于拉格朗日乘子法及相对坐标系原理[13-17],建立受电弓框架部分的动力学方程,最终形成受电弓系统运动微分方程
( 1 )
式中:A为树系统的系数矩阵;mP为弓头等效质量;q为树系统的坐标向量;yP为弓头的运动位移;B为树系统的广义载荷向量;Φq为四连杆结构约束方程的雅克比矩阵;λ为拉格朗日乘子;bP为弓头等效载荷。


压力;mP为弓头等效质量;kP、cP分别为弓头等效刚度和等效阻尼;yP、yD分别为弓头和弓头支撑点的位移坐标;TUp为升弓力矩,g为重力加速度。
1.2 接触网模型
简单链型悬挂接触网结构主要由接触线、承力索、吊弦以及支撑定位等效装置(腕臂系统和支柱等)组成,见图2。

采用有限元方法,接触线与承力索使用预应力欧拉梁单元,吊弦采用杆单元,线夹用质量单元代替,定位器采用弹簧单元与质量单元等效,其动力学方程形式为

( 2 )
式中:M为接触网质量矩阵;C为接触网阻尼矩阵;K为接触网刚度矩阵;x为接触网位移向量;P为接触网载荷向量。
根据模态叠加原理将接触网动力学方程解耦,即
j=1,2,…,n
( 3 )
式中:xNj为接触网第j阶模态坐标;ωj为接触网第j阶频率;ξj为接触网第j阶相对阻尼系数;PNj为接触网第j阶等效载荷;n为模态截断阶数。
1.3 弓网接触模型
弓网接触模型是为了实现受电弓接触网系统的相互耦合作用,通过弓网接触点的运动状态来计算接触压力[7],其表达式为
( 4 )

1.4 计算方法
1.4.1 弓网耦合系统求解方法
受电弓系统的动力学方程见式( 1 ),由于自由度较少,采用四阶龙格库塔方法求解;对于接触网系统,其动力学方程见式( 3 ),采用中心差分法求解。弓网耦合系统求解流程见图3。

1.4.2 受电弓铰接力求解方法
对受电弓上臂杆、下臂杆和拉杆进行隔离分析,其受力图见图4,动力学方程由刚体平面运动微分方程和质心运动定理建立,即
( 5 )
式中:JO1、MO1(F)分别为拉杆相对于O1点的转动惯量与合力矩;JO3、MO3(F)分别为下臂杆相对于O3点的转动惯量与合力矩;JC2、MC2分别为上臂杆相对其质心C2的转动惯量与合力矩;aC2x、FC2x分别为上臂杆x方向质心运动加速度和合力;aC1x、aC1x、FC1y、FC1y分别为拉杆x和y方向质心运动加速度和合外力;aC3x、aC3x、FC3y、FC3y分别为下臂杆x和y方向质心运动加速度和合外力。


1.4.3 受电弓关键部件动载荷求解方法
根据受电弓的结构特点与受力环境可知,弯矩是上臂杆的主要载荷成分,拉杆主要承受轴向力,下臂杆同时受到轴向力与弯矩的作用。
(1) 上臂杆动载荷


( 6 )

(2) 拉杆、下臂杆动载荷

F2ycos((θ1(0)-θ1)-π/2)-
( 7 )
FA(xD3)=-F4xcos(π-(θ3(0)-θ3))+
F4ycos((θ3(0)-θ3)-π/2)-
( 8 )
TA(xD3)=-F4x(L3-xD3)sin(π-(θ3(0)-θ3))-
F4y(L3-xD3)sin((θ3(0)-θ3)-π/2)+
( 9 )

2 计算结果
2.1 动态载荷时域特性
2.1.1 弓网接触力与弓头悬挂力
通过式( 1 )、式( 3 )、式( 4 ),求解出在200、250、300、350 km/h 4种速度工况下的弓网接触力和弓头悬挂力。其时间历程曲线见图7。
对弓网接触力和弓头悬挂力进行统计,其最大值、最小值、平均值、标准差,以及变异系数见表1和表2。

表1 接触力统计


表2 弓头悬挂力统计
结合图7、表1、表2可知:在此计算条件下,弓头悬挂力的平均值大于弓网接触压力的平均值,其差值约为弓头重力;弓头悬挂力的标准差比弓网接触压力小;弓网接触压力标准差随着速度增加而增大,而弓头悬挂力标准差却随着速度增加先增大后减小。
2.1.2 上臂杆

上臂杆弯矩统计数值见表3。

表3上臂杆点处弯矩统计
2.1.3 拉杆与下臂杆动载荷
根据式( 5 )~式( 9 )计算出不同速度下的拉杆轴向力和下臂杆轴向力及弯矩。选取速度为200 km/h的工况,绘制时域曲线见图9~图11。



由图9~图11可见,拉杆轴向力为拉力,在xD1=L1(O2处)拉力最大,最小值出现在D1=0(O1处);下臂杆轴向力为负值,受压力载荷,在下臂杆底端xD3=0(O3处),轴向力与弯矩均为最大,在xD3=L3(O4处),下臂杆轴向力与弯矩均为最小。
对于200、250、300、350 km/h 4种速度工况,拉杆、下臂杆动态载荷统计值见表4~表6。

表4 拉杆全段轴向力统计
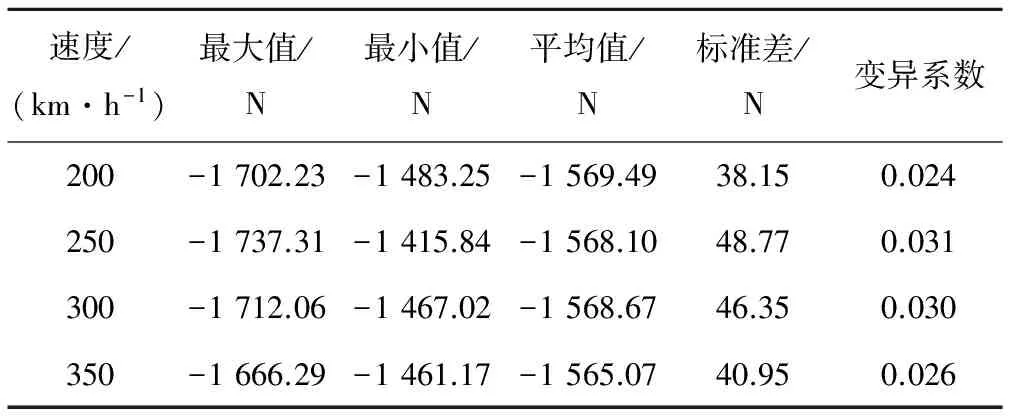
表5 下臂杆全段轴向力统计

表6 下臂杆O3铰点处(xD3=0)弯矩统计
由表4~表6可知:4种速度工况下,拉杆轴向处于受拉状态,其轴向力最大值范围为1.4~1.6 kN,最小值范围为1.2~1.4 kN;下臂杆轴向处于受压状态,其最大值范围为1.6~1.8 kN,最小值范围为1.4~1.5 kN,下臂杆弯矩最大值范围为1.0~1.3 kN·m,最小值变化不大,约908 N·m。随着运行速度的增加,拉杆与下臂杆主要载荷标准差与上框架弯矩及弓头悬挂力变化规律相同。
2.2 动态载荷频域特性
2.2.1 接触力与弓头悬挂力
通过对弓网接触压力及弓头悬挂力时域曲线的傅里叶变换,得到弓网接触压力和弓头悬挂力频域曲线,见图12。

从图12可知:弓网接触压力与弓头悬挂力低阶主频(前三、四阶)相同;在中间频率宽度为5 Hz内,弓头悬挂力幅值大于弓网接触压力;在较高频率段,弓网接触压力随着速度增大而占有量增加,但弓头悬挂力的幅值在较高频率段占有量很少。
2.2.2 受电弓关键部件动载荷频域特性
分析运行速度为200 km/h工况下,上臂杆弯矩、拉杆轴向拉力、下臂杆轴向压力以及弯矩的频域信息,并与此时弓头悬挂力的频域曲线对比,见图13。

从图13可以看出,对于上臂杆弯矩(蓝)、拉杆轴向力(绿)、下臂杆轴向力(红),其主频与弓头悬挂力(黑)的成分完全相同,但下臂杆弯矩(青)相对其他载荷具有更丰富的频率成分。
3 结果分析
3.1 接触压力对弓头响应影响
随着列车运行速度的增加,受电弓与接触网间相互作用加剧,接触压力也会出现更多高频成分,见图12,其标准偏差也会随之增大,见表1。
为了获悉接触压力的影响因素,首先算出不同速度下受电弓跨距通过频率fS和吊弦通过频率fd,即
fS=(v/3.6)/LS
(10)
fd=Nd×(v/3.6)/LS
(11)
式中:LS表示跨距;v为受电弓运行速度;Nd为一跨内的吊弦数。
通过接触压力的频谱图(图12)及通过跨距、吊弦频率(表7),可以总结出以下规律:接触压力低阶主频基本为通过跨距频率的整数倍;接触压力高阶主频基本为通过吊弦频率。从fS与fd的计算公式不难发现,接触压力的频率成分与接触网系统结构(跨距、吊弦布置)和运行速度密切相关。

表7 通过跨距频率与通过吊弦频率
3.2 接触压力对上臂杆的影响
上臂杆与弓头通过弓头悬挂连接,弓头悬挂力也是直接作用于上臂杆的外力。为了探究接触压力通过弓头悬挂系统传递到上臂杆的动态特性,在弓头施加随时间线性增加的正弦位移信号,进行扫频分析,激扰频率范围为0~20 Hz,振幅1 mm。
从图14、图15可知:0~4.5 Hz频率范围包含了受电弓的一阶振动主频2.7 Hz,在此频率区间弓头与框架(弓头悬挂点)同相位振动,且弓头悬挂点振动幅值大于弓头的振动幅值,结合图12,说明接触压力的低阶同相位振动频率成分能够完全传递到上臂杆(弓头悬挂力);在4.8~9.8 Hz频率范围内,弓头的振动幅值增大,而上臂杆的振动幅值减小,其变化趋势相反,结合图15可知弓头与上臂杆发生反相振动,说明振动传递到框架结构时振动幅值会被放大;在大于9.8 Hz的频率范围,弓头与弓头悬挂点的幅值均减小,体现出弓头质量悬挂系统的吸振作用,振动传递到上臂杆的部分较少。


3.3 接触压力对拉杆和下臂杆响应影响
上臂杆与拉杆、下臂杆通过刚性铰连接。作用于受电弓四连杆结构的外力(弓头悬挂力)通过上臂杆传递至拉杆和下臂杆。因此上臂杆、拉杆以及下臂杆的主要频率成分基本相同。


4 结论
本文采用受电弓多刚体模型,剖析弓网相互作用过程受电弓关键部件动态载荷特性,厘清弓网接触压力向下传递并作用于受电弓各主要部件的动态载荷传递律:
(1) 随着受电弓运行速度的增加,受电弓滑板所接受的外界激励加快,接触压力主频成分中的高频部分增加。接触压力通过弓头弹性悬挂系统时:接触压力的低阶频率成分透过悬挂系统而作用于上臂杆;而接触压力的大部分高阶频率成分被此悬挂系统阻隔,不能直接传递到受电弓上臂杆,弹性悬挂系统体现出吸能减振的作用。
(2) 当速度增加至一定范围,接触压力被弹性悬挂系统过滤掉的成分会增加,导致作用于上臂杆的载荷剧烈程度反而减轻。因此,受电弓四连杆框架结构动态载荷的时域特性随速度增加先变剧烈再减轻。
(3) 由于四连杆框架通过刚性铰连接,弓头悬挂力、上臂杆弯矩、拉杆轴向力以及下臂杆弯矩的频率成分基本相同。四连杆框架结构的动态载荷均完全承受了来自接触压力低阶主频(跨频相关)的作用。下臂杆动态载荷中,因切向惯性力的作用,其弯矩具有相比其轴向力具有更多的频率成分,下臂杆所受的力学环境也更为恶劣。
参考文献:
[1] 张卫华.高速列车耦合大系统动力学理论与实践[M]. 北京:科学出版社, 2013:303-306.
[2] 张卫华,曹新文. 高速受电弓-接触网系统的动力学研究[J]. 西南交通大学学报, 1991,26(1):105-111.
ZHANG Weihua, CAO Xinwen. Dynamic Analasys of High-speed Pantograph-catenary Systerm[J].Journal of Southwest Jiaotong University,1991,26(1):105-111.
[3] 李国顺. 受电弓结构参数识别及弓-网系统动力学模型的建立[J]. 铁道机车车辆, 1996(1):56-60.
LI Guoshun. Structure Parameter Identification of Pantograph and Dynamic Model Establishment of Pantograph-catenary System[J]. Railway Locomotive & Car,1996(1):56-60.
[4] 李丰良,粟谦,孙焰. TSG3受电弓力学模型及运动微分方程[J]. 铁道学报,1998, 20(6):119-121.
LI Fengliang,SU Qian, SUN Yan. Mechanical Models and Differential Equation of Motion for TSG3 Pantograph[J]. Journal of the China Railway Society,1998, 20(6):119-121.
[5] DRUGGE L, LARSSON T, STENSSON A. Modelling and Simulation of Catenary-pantograph Interaction[J]. Vehicle System Dynamics, 2015, 33(1):490-501.
[6] 翟婉明,蔡成标. 机车-轨道耦合振动对受电弓-接触网系统动力学的影响[J]. 铁道学报, 1998,20(1):32-38.
ZHAI Wanming CAI Chengbiao. Effect of Locomotive-track Coupling Vibrations on Pantograph-catenary System Dynamics[J]. Journal of the China Railway Society, 1998,20(1):32-38.
[7] RAUTER F G, POMBO J, AMBRSIO J, et al. Contact Model for the Pantograph-catenary Interaction[J]. Journal of System Design & Dynamics, 2007, 1(3):447-457.
[8] 梅桂明. 受电弓-接触网系统动力学研究[D]. 成都:西南交通大学, 2011.
[9] BIANCHI J P, BALMES E, ROCHES G V D, et al. Using Modal Damping for Full Model Transient Analysis Application to Pantograph-catenary Vibration[J]. Pro cIsma, 2010(9):20-22.
[10] PELC J. Influence of Pantograph Suspension Characteristics on the Contact Quality with the Catenary for High-speed Trains[J]. Computers & Structures, 2012,110/111(10):32-42.
[11] BRUNI S, AMBROSIO J, CARNICERO A, et al. The Results of the Pantograph-catenary Interaction Benchmark[J]. Vehicle System Dynamics, 2015, 53(3):412-435.
[12] VAN O, BALMES E, LORANG X. Damping Characterization of a High Speed Train Catenary[C]//Proceedings of the 24th Symposium of the International Association for Vehicle System Dynamics (IAVSD 2015). Graz, 2015:17-21.
[13] 刘延柱,洪嘉振,杨海兴. 多刚体系统动力学[M]. 北京:高等教育出版社, 1989:114-164.
[14] 洪嘉振. 计算多体系统动力学[M]. 北京:高等教育出版社, 1999:108-201.
[15] SHABANA A A. Computational Dynamics[M]. 3rd ed. Chichester:John Wiley & Sons,2010,87-170.
[16] 刘延柱,潘振宽,戈新生.多体系统动力学[M]. 北京:高等教育出版社, 2014:95-120.
[17] 王江文,梅桂明,李瑞平,等. 基于相对坐标系的受电弓多刚体动力学模型及其验证[J]. 机车电传动, 2016(1):53-57.
WANG Jiangwen, MEI Guiming, LI Ruiping, et al. Pantograph Multiple Rigid-body Dynamics Model and Its Verification Based on Relative Coordinate System[J]. Electric Drive for Locomotives,2016(1):53-57.
[18] 倪振华. 振动力学[M]. 西安:西安交通大学出版社, 1989:161-422.