基于ESO的DGVSCMG双框架伺服系统不匹配扰动抑制
2018-04-27李海涛林杰韩邦成
李海涛,林杰,韩邦成
1.北京航空航天大学 仪器科学与光电工程学院,北京 100083 2.北京航空航天大学 新型惯性仪表与导航系统技术国防重点学科实验室,北京 100083
控制力矩陀螺(Control Moment Gyroscope, CMG)和飞轮是目前航天器进行姿态控制的两种主要的惯性执行机构。飞轮输出力矩小但精度高,主要用于航天器姿态稳定。CMG输出力矩大,一般用于航天器的姿态机动[1-2]。CMG按结构可分为单框架CMG和双框架CMG。双框架CMG可输出两个自由度的力矩,相比单框架CMG具有使用个数少、奇异问题不明显等优点。双框架变速率控制力矩陀螺(Double Gimbaled Variable Speed Control Moment Gyroscope,DGVSCMG)既能工作于飞轮模式,又能工作于CMG模式[3]。当高速转子的转速改变时,DGVSCMG工作在飞轮模式,可输出高精度力矩;当高速转子的转速恒定时,DGVSCMG工作在CMG模式,可输出大力矩。而两种工作模式下框架伺服系统的精确控制是保证DGVSCMG高精度姿态控制的重要前提。
在飞轮模式下,内、外框架需要保证零速率锁定。当内框架角位置与定义的零位存在偏差且高速转子加减速时,其角动量的变化量会直接对外框架产生干扰力矩。此干扰通过外框架-内框架-转子三体之间的耦合作用传递给整个系统,进而影响飞轮模式下的DGVSCMG性能[4]。同样,在陀螺模式下时,当框架转动,内、外框架系统受到的陀螺耦合力矩、摩擦力矩、牵连力矩、系统参数不确定性等干扰,严重影响框架系统的角速率输出精度,从而影响CMG的输出力矩精度[5]。
针对双框架系统干扰抑制问题,研究者提出过很多方法。文献[6]采用加速度反馈的扰动抑制方法,但提取加速度时会不可避免地引入噪声;文献[7]从系统传递函数角度,采用前馈加反馈的复合控制提高控制精度;文献[8]用CMG的实际参数和实验采集数据对摩擦力矩模型参数进行了遗忘因子递推最小二乘法辨识,计算量较大;文献[9]和文献[10]采用基于模态分离的反馈线性化方法来提高控制精度;文献[11]中利用前馈的控制方法对干扰进行抑制。上述方法均实现了对框架系统中的某一类干扰的抑制,但没有对框架系统在DGVSCMG两种模式下的干扰进行总体分析,同时也没有考虑不匹配干扰的抑制问题。
扩张状态观测器(Extended State Observer,ESO)是最早由韩京清教授提出的一种干扰估计方法,此方法不依赖于系统具体的数学模型,它将影响被控对象输出的扰动扩展成新的状态变量并实时估计,因而可避免数学建模不准确而带来的诸多问题[12-13]。基于ESO的控制方法在工程中有广泛应用,如电机控制、机器人控制、飞艇轨迹控制等领域[14-16]。在本文中,CMG框架系统的耦合力矩可以通过计算得出,但是耦合到内外框架的干扰除了耦合力矩外还有摩擦力矩、牵连力矩、未建模动态等。利用ESO可以将这些系统参数不确定性带来的干扰进行估计补偿,相对于利用前馈、反馈等传统控制方法而言,解决了由于未建模误差带来的影响。传统的ESO设计需要系统满足积分串联形式[17]且综合扰动与系统的输入要在一个通道上[18]。CMG框架系统的状态方程并不严格满足积分串联形式,且有部分扰动项与控制输入不在同一通道上,因此属于一种不匹配扰动形式。本文针对双框架伺服系统不匹配干扰抑制问题,提出了一种ESO设计方法与控制手段。
首先设计了含有不匹配干扰的ESO,其次通过构造一个新的坐标变换,对系统的不匹配干扰进行转化,最后利用状态反馈与ESO结合的控制方法对干扰进行抑制,并对全局系统稳定性进行了分析。仿真与实验结果证明了该方法的有效性。
1 DGVSCMG双框架动力学模型与系统干扰分析
1.1 双框架伺服系统数学模型
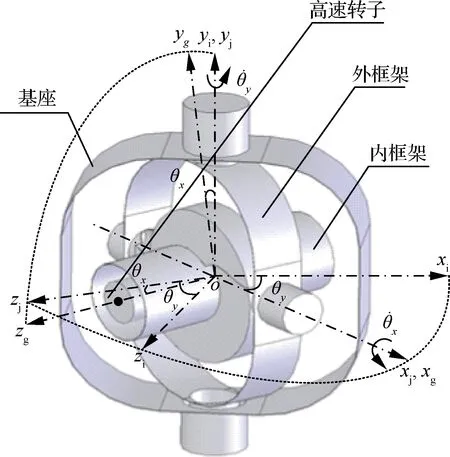
图1 DGVSCMG坐标定义Fig.1 Definition of coordinate system of DGVSCMG

根据文献[19]可以推导得到的DGVSCMG内、外框架伺服系统的简化模型为
(1)

(2)
式中:ix和iy分别为内、外框电机绕组电流;kTx和kTy为电机的力矩系数;Rx和Ry为内、外框等效电阻;Lx和Ly为电感值;kex和key为内、外框的反电动势系数;u1和u2为控制输入电压量。
(3)

1.2 双框架伺服系统模型干扰分析

由文献[5]可知,卫星运动引起的牵连力矩是与卫星运动的角速度、框架角位置及高速转子角动量有关的非线性项,且卫星运动速度的大小及方向信息无法实时测得,因而将卫星运动引起的牵连力矩看作是慢变的未知扰动力矩。由式(3)也可知,内、外框架系统的干扰与输入不在一个通道上,不能直接从控制输入通道进行补偿,产生了不匹配干扰问题。
2 基于ESO的双框架伺服系统干扰抑制控制器设计
2.1 不匹配干扰的ESO设计
传统的ESO针对的系统形式为[18]
(4)
式中:b为系统参数。由式(4)可知,此类系统中的系统干扰量ω(t)与控制输入量u在一个通道上,为匹配干扰的抑制问题,通过观测器得到的干扰估计值可直接通过系统输入进行补偿。此类型系统的扩张状态器设计为
(5)

从式(3)可知,将内、外框架的耦合力矩、转子加速度引起的外框架干扰力矩、参数扰动等视为系统的总体外部干扰,原系统可解耦为内、外框架两个子系统。为简化公式,本节扩张状态观测器以及控制器设计均以内框架为例。原内框架系统表述为
(6)
(7)
(8)
式中:e=z-q为状态误差,L=[β1β2β3β4]T为观测器增益参数,C=[1 0 0 0]为系统输出矩阵,z为对应q的估计量。由此得到观测器误差方程为
(9)
内框架全局系统状态方程可表述为

(10)
2.2 复合控制器设计
由式(8)可知,ESO对内框架的干扰量及一阶导数进行了估计,但系统存在不匹配干扰,干扰量不能直接通过输入通道进行补偿。本文通过坐标变换对不匹配干扰量进行转换,然后结合ESO输出的干扰项及其一阶导数估计值和状态反馈进行复合控制。对式(3)采取坐标变换:
(11)

(12)

(13)

(14)

(15)
由式(15)可知,为使系统实现速率跟踪,则控制器参数kr=-(k1-kex),同时k1和k2的选取满足使系统矩阵赫尔维茨稳定,L的选取也应使得观测器输出与实际值的误差快速收敛。
2.3 稳定性分析
将控制输入式(13)代入经过坐标变换处理后的全局系统,得到:

(16)
(17)
由式(17)可知,系统的抗扰能力与ESO参数设计有关,在保证稳定前提下,应使β1/β4、β2/β4尽量小。同时实际参数选择还要满足:观测器的带宽应比控制器的带宽高2~5倍,而观测器带宽应低于控制系统采样频率的5~10倍[1]。
3 仿真验证
为了验证所提出的复合控制方法应用在DGVSCMG中的双框架伺服系统中时的稳定性以及抑制干扰性能,本文根据框架伺服系统动力学模型,搭建了基于Simulink的系统仿真模型,并在仿真中与传统控制方法[20]进行了对比。DGVSCMG系统设计参数如表1所示。根据状态反馈极点配置及参考文献 [21],仿真时,复合控制器参数设定为,k1=-4.602 1、k2=3.5、β1=251.33、β2=23 687.05、β3=9.92×105、β4=1.56×107。

表1 框架伺服系统仿真参数Table 1 Simulation parameters of gimbal servo system
3.1 飞轮模式对比仿真结果
飞轮模式下,仿真条件为内框架初始位置给定为10°,内、外框架速率参考给定为0(°)/s,高速转子在1 s时由4 000 r/min开始升速,利用传统控制方法以及本文提出的复合控制方法分别得到了双框架速率曲线如图2所示。
可以看出,在1 s时,转子升速会对外框架产生扰动量,使外框架速率产生波动,并通过两框架的耦合将速率波动传给内框架。由图2可知,两种方法均能抑制飞轮模式下框架受到的干扰,但通过对比可知,本文所提出的方法在1 s时的速率跳动量约为传统控制方法仿真结果的50%,提高了零速率伺服精度,使框架系统具有更好的抗扰能力。

图2 飞轮模式下框架角速率Fig.2 Gimbal angular rate in flywheel mode
3.2 陀螺模式对比仿真结果
CMG模式下,为了体现所提出复合控制方法对陀螺耦合力矩的抑制效果,仿真条件设定为:转子转速8 000 r/min,内、外框架初始角速率为0(°)/s,在0.2 s时内框给定一个幅值为5(°)/s,频率为3 Hz的正弦指令,而外框架的给定速率为0(°)/s。由于由卫星运动引起的牵连力矩是一个慢变的未知扰动力矩,在此用外加频率为1 Hz、幅值为0.02 N·m的扰动代替。在上述仿真条件下,利用传统控制方法以及所提出的复合控制方法分别得到了框架速率曲线如图3所示。
图3仿真结果表明,两种控制方法对干扰均有一定的抑制效果,且本文方法能够进一步降低陀螺模式下耦合干扰力矩对框架速率伺服性能的影响,使得外框架速率最大跳动量从0.25(°)/s降低到0.07(°)/s,减小了70%。同时,由图4可知本文所提出的不匹配干扰ESO具有较好的跟踪实际干扰的效果,使系统具有更好的干扰抑制能力。

图3 陀螺模式下框架角速率Fig.3 Gimbal angular rate in CMG mode

图4 利用本文方法得到的外框架干扰估计Fig.4 Disturbance estimation of outer gimbal using proposed method
4 实验验证
为验证所设计的复合控制器在双框架系统不匹配干扰抑制方面的有效性,以北京航空航天大学新型惯性仪表与导航系统技术国防重点学科实验室所研制的某型号DGVSCMG系统为对象进行实验研究,实验装置如图5所示。
实验基于DSP(TMS320C6701)和FPGA(A3P125)的数字控制系统,分别采用传统控制方法和本文所提出的方法对框架系统在飞轮模式和陀螺模式下进行了对比实验。
飞轮模式下实验条件为:内框架初始位置给定为10°,内外框架速率参考给定为0(°)/s,高速转子在1 s时由4 000 r/min开始升速。
飞轮工作模式下两种方法得到的内外框架速率曲线如图6所示。由图可知,本文提出方法能有效减小高速转子加减速对内外框架速率产生的扰动,使得内框架速率最大跳动量从0.14(°)/s减小到0.02(°)/s,使得外框架速率最大跳动量从0.18(°)/s减小到约为0.04(°)/s。
CMG模式下实验条件为:转子8 000 r/min的情况下,内框架给定一个幅值为5(°)/s,频率为3 Hz的正弦指令,而外框架的给定速度为0(°)/s。比较两种方法下外框架速率的跟踪性能,可以看到用传统控制方法时外框架产生了0.2(°)/s的速率波动,采用本文的控制方法,速率波动为0.05(°)/s,如图7所示。

图5 DGVSCMG实验装置Fig.5 DGVSCMG experimental installations
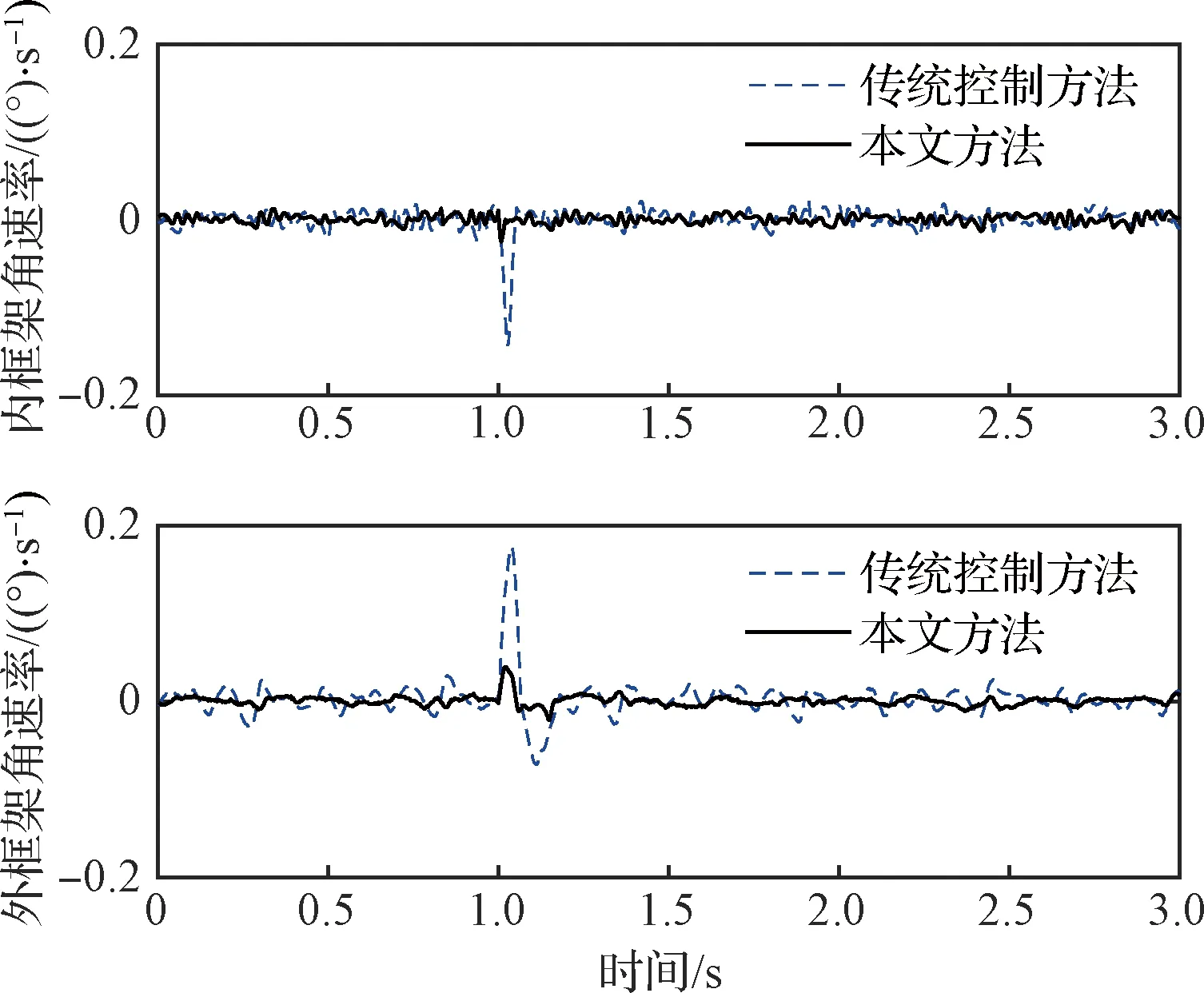
图6 飞轮模式下的性能对比Fig.6 Comparison of performance in flywheel model

图7 陀螺模式下的性能对比Fig.7 Comparison of performance in CMG model
5 结 论
1) DGVSCMG框架伺服系统是一个双输入双输出、多变量、强耦合且扰动不匹配的复杂系统。为实现框架系统的高精度角速率输出,针对两种模式下的不匹配干扰抑制问题,本文提出一种基于ESO和状态反馈的复合控制方法。
2) 仿真和实验结果表明:所提出的复合控制方法在飞轮模式和陀螺模式下,可进一步提高框架系统零速率伺服精度,使得速率跳动量降低,有效抑制框架耦合力矩对速率精度的影响,实现了框架系统的高精度控制。
[1] 房建成, 孙津济, 樊亚洪. 磁悬浮惯性动量轮技术[M]. 北京: 国防工业出版社, 2012: 15-26.
FANG J C, SUN J J, FAN Y H. Magnetically suspended inertia momentum wheel technology[M]. Beijing:National Defense Industry Press, 2012: 15-26 (in Chinese).
[2] 房建成, 任元. 磁悬浮控制力矩陀螺技术[M]. 北京: 国防工业出版社, 2014: 1-17.
FANG J C, REN Y. Magnetically suspended control moment gyroscope technology[M]. Beijing:National Defense Industry Press, 2014: 1-17 (in Chinese).
[3] 陈璐, 袁建平. 基于双框架变速控制力矩陀螺的航天器姿态控制研究[J]. 电子设计工程, 2014, 22(23):114-117.
CHEN L, YUAN J P. Spacecraft attitude control based on a double-gimbal variable-speed control moment gyroscope[J]. Electronic Design Engineering, 2014, 22(23):114-117 (in Chinese).
[4] 宁欣, 韩邦成, 房建成. 基于干扰观测器的双框架变速率控制力矩陀螺解耦控制[J]. 机械工程学报, 2017, 53(10): 53-59.
NING X, HAN B C, FANG J C. Disturbance observer based decoupling method of double-gimbaled variable speed control moment gyroscope[J]. Journal of Mechanical Engineering. 2017, 53(10): 53-59 (in Chinese).
[5] 崔培玲, 杨珊, 李海涛. 双框架MSCMG框架伺服系统的动力学解耦及扰动补偿[J]. 航空学报, 2016, 37(3): 916-927.
CUI P L, YANG S, LI H T. Dynamic decoupling control and disturbance compensation of gimbal servo system of double gimbal MSCMG[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(3): 916-927 (in Chinese).
[6] 李海涛, 房建成, 韩邦成, 等. 一种双框架磁悬浮控制力矩陀螺框架伺服系统扰动抑制方法研究[J]. 宇航学报, 2009, 30(6): 2199-2205.
LI H T, FANG J C, HAN B C, et al. Study on the system disturbance rejection method used in the gimbal servo system of double gimbal magnetically suspended control moment gyro[J]. Journal of Astronautics, 2009, 30(6): 2199-2205 (in Chinese).
[7] 徐向波, 房建成, 杨莲慧. 控制力矩陀螺框架系统高精度复合控制研究[J]. 载人航天, 2012, 18(5): 19-23.
XU X B, FANG J C, YANG L H. Study on high precision control of CMG gimbal system[J]. Manned Spaceflight, 2012, 18(5): 19-23 (in Chinese).
[8] 李红, 杭影, 韩邦成, 等. DGCMG框架伺服系统摩擦力矩建模及辨识[J]. 振动、测试与诊断, 2014, 34(6): 1001-1007.
LI H, HANG Y, HAN B C. et al. Analysis of friction torque model of DGCMG gimbal servo system with its identification[J]. Journal of Vibration, Measurement & Diagnosis, 2014, 34(6): 1001-1007 (in Chinese).
[9] SU D, XU S. The precise control of a double gimbal MSCMG based on modal separation and feedback linearization[C]∥International Conference on Electrical Machines and Systems. 2013: 1355-1360.
[10] CHEN X C, REN Y. Modal decoupling control for a double gimbal magnetically suspended control moment gyroscope based on modal controller and feedback linearization method[J]. Proc IMechE Part C: Journal of Mechanical Engineering Science, 2014, 228(13): 2303-2313.
[11] 李延宝, 李结冻, 孙宏丽, 等. 磁悬浮力矩陀螺内外框架低速高精度控制技术研究[J]. 上海航天, 2015, 32(5): 20-25.
LI Y B, LI J D, SUN H L, et al. Study on high precision control of low speed magnetically suspended control moment gyroscope for inside and outside gimbal[J]. Aerospace Shanghai, 2015, 32(5): 20-25 (in Chinese).
[12] RADKE A, GAO Z Q. A survey of state and disturbance observers for practitioners[C]∥American Control Conference. Piscataway, NJ: IEEE Press, 2006.
[13] HAN J Q. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
[14] LI S H, LIU Z G. Adaptive speed control for permanent-magnet synchronous motor system with variations of load inertia[J]. IEEE Transactions on Industrial Electronics, 2009, 56(8): 3050-3059.
[15] ZHU E, PANG J, SUN N, et al. Airship horizontal trajectory tracking control based on Active Disturbance Rejection Control (ADRC)[J]. Nonlinear Dynamics, 2014, 75(4): 725-734.
[16] SHI R, SONG J, WAN W. Active disturbance rejection control system design for a morphing wing structure[J]. Asian Journal of Control, 2014, 17(3): 832-841.
[17] 韩京清, 张荣. 二阶扩张状态观测器的误差分析[J]. 系统科学与数学, 1999(4): 465-471.
HAN J Q, ZHANG R. Error analysis of second order ESO[J]. Journal of System Science and Math Science, 1999(4): 465-471 (in Chinese).
[18] LI S H, YANG J, CHEN W H, et al. Generalized extended state observer based control for systems with mismatched uncertainties[J]. IEEE Transactions on Industrial Electronics, 2012, 59(12): 4792-4802.
[19] LI H T, NING X, HAN B C. Composite decoupling control of gimbal servo system in double-gimbaled variable speed CMG via disturbance observer[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(1): 312-320.
[20] 魏彤, 房建成, 刘珠荣. 双框架磁悬浮控制力矩陀螺动框架效应补偿方法[J]. 机械工程学报, 2010, 46(2): 159-165.
WEI T, FANG J C, LIU Z R. Moving-gimbal effects compensation of double gimbal magnetically suspended control moment gyroscope based on compound control[J]. Journal of Mechanical Engineering, 2010, 46(2): 159-165 (in Chinese).
[21] GAO Z. Scaling and bandwidth-parameterization based controller tuning[C]∥Proceedings of the American Control Conference. Piscataway, NJ: IEEE Press, 2003: 4989-4996.
