基于任务的硬式加油伸缩管操纵品质研究
2018-04-27曹华姿郭有光王立新
曹华姿,郭有光,王立新
北京航空航天大学 航空科学与工程学院,北京 100083
空中加油是一项延长飞机执行任务时间,增加飞机航程的技术[1],目前空中加油分为两种形式,即软式加油[2]和硬式加油[3]。伸缩管是硬式空中加油任务的重要设备,在硬式加油过程中由操纵员操纵伸缩管完成与受油机的对接[4]。该过程对伸缩管姿态操纵精度以及快速性的要求极高,因此伸缩管必须具有良好的操纵品质。然而,目前国内外关于伸缩管操纵品质的要求以及评定的方法研究较少,尚无系统且成熟的理论结果,因此对伸缩管的操纵品质评定方法和操纵品质要求进行研究具有十分重要的意义。
某些学者仍沿用飞机的飞行品质评定准则来评定伸缩管的操纵品质[5]。由于伸缩管在构型与惯性特性、受力特性、运动方式(受万向节约束仅能相对万向节偏航和俯仰运动)、操纵员不能感受伸缩管的运动过载等方面均与飞机存在较大的区别,使得二者的运动特性差异较大。而常规飞机飞行品质评定方法利用了飞机在这些方面的规律,若直接采用飞机的飞行品质研究方法,显然难以满足伸缩管的设计要求。因此,本文提出了采用基于任务的评定方法对伸缩管的操纵品质进行评定并完成对伸缩管操纵品质要求的研究。
所谓基于任务的评定方法是指操纵员通过完成特定的评定任务对伸缩管在完成加油任务中的操纵品质进行评定[6]。20世纪90年代初,美国空军莱特实验室最早开展了基于飞行任务的飞行品质评定新方法的研究[7-9],较详细地介绍了这些机动动作的选取原则、方法。相对于常规飞行品质评定方法,基于任务的飞行品质评定方法具有任务针对性和包线适应性。文献[10-11]利用基于任务的评定方法将控制律设计和飞行品质结合起来,研究了控制律设计与飞行品质之间的关系。
本文先对硬式加油伸缩管的运动模型以及本体特性进行介绍与分析。为了解决研究样本较少的问题,引入了可改变闭环响应特性的伸缩管控制器,通过改变该控制器的参考模型参数获得了不同闭环响应特性的研究样本[6]。然后,本文依据要求设计了操纵品质任务试验以及任务评定方法,从而建立伸缩管操纵品质评定方法。最后,通过对多组试验样本进行基于任务的操纵品质评定,并采用低阶等效拟配方法获得各个研究样本的低阶等效参数[12-14],再对评定结果和低阶等效参数之间的联系进行研究与整理,从而获得了相应的操纵品质边界,进而建立伸缩管操纵品质要求。由于本文提出的方法和操纵品质要求是通过在地面空中加油模拟器上模拟真实空中加油任务获得的,因此具有一定的客观性和准确性。
1 伸缩管本体介绍
1.1 伸缩管
本文所研究伸缩管的结构如图1所示,主要由万向节、主硬管、内管、舵面、加油接头组成。伸缩管的本体部分为管状结构,内部安装有可伸缩的双层套管,分别为主硬管和内管,内管端部有加油接头,它们共同组成输送燃油的通道[15]。伸缩管通过万向节悬挂在加油机的尾部,可以绕万向节进行俯仰和滚转运动。伸缩管上安装有舵面,通过控制舵面的偏转,可以改变舵面的气动力,控制伸缩管的俯仰和滚转运动。

图1 伸缩管组成结构Fig.1 Mechanical structure of flying boom
伸缩管的运动范围必须满足空中加油任务的需求。美军联合作战机构关于空中加油任务的相关指导文件规定,在进行硬式空中加油时,加油机(如KC-135)伸缩管的使用运动范围如图2所示。从图2中可以看出伸缩管俯仰运动是以30°俯仰角为中心线,俯仰运动范围为[20°, 40°],偏航运动是以0°偏航角为中心线,偏航运动范围为[-10°, 10°]。
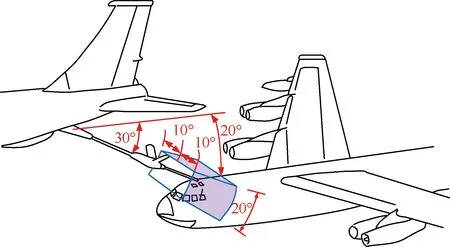
图2 伸缩管飞行范围[8]Fig.2 Flight limits of flying boom[8]
1.2 本体特性
伸缩管的舵面具有安定面和操纵面的双重作用。当舵面固定不动时,舵面提供伸缩管受到扰动时的稳定力矩,因此具有安定面的作用。当舵面偏转产生操纵力矩用于控制伸缩管的姿态时,舵面又具有操纵面的作用。伸缩管的舵面一般安装在主硬管的尾部,由于舵面是其升力的主要来源,因此伸缩管的气动中心相对质心靠后,伸缩管具有静稳定性。
虽然加油机的伸缩管具有类似于飞机舵面的操纵面,但是二者在约束形式、受力特性、运动特性等方面存在着较大的差异。飞机在空中飞行属于自由无约束状态,具有6个自由度,可以实现空间内的任意方向运动。而伸缩管的端点受万向节约束,仅具有偏航和俯仰两个运动自由度。此外伸缩管的内管可以在作动器的作用下实现伸缩运动,内管的伸缩在一定程度上也会改变伸缩管的姿态运动特性。飞机在飞行过程中,所受到的主要作用力为气动力、重力、发动机推力,而伸缩管除了受到气动力与重力的作用外,还受到了加油机通过万向节提供的支反力与支反力矩。通过上述分析不难发现伸缩管与飞机的运动模型存在一定的差异。


表1 伸缩管模态参数Table 1 Modal parameters of flying boom

图3 伸缩管模态响应图Fig.3 Responses of modes of flying boom
2 获取任务试验样本
一般而言,伸缩管必须在控制器的作用下才能完成空中加油任务,因此操纵品质评定必须针对伸缩管的闭环系统。此外,目前国内外服役的伸缩管型号太少,可供研究的数据较少,这是限制伸缩管操纵品质研究的最大障碍。美国德莱顿飞行研究中心采用基于参考模型的控制方法来获得用于任务试验与品质研究的研究样本和数据[17]。文献[6]也采用了同样的方法获得了飞行品质评价的样本,这些应用客观上证明了该方法的有效性。为了克服数据限制,本文通过借鉴该方法,引入可以改变响应特性的控制器,来获取用于研究的试验样本,从而为基于任务的操纵品质评定提供试验样本和数据支撑。
2.1 控制系统结构
为了完成伸缩管控制器设计并获得用于分析操纵品质的样本,采用包含控制器和参考模型的伸缩管控制系统,进行操纵品质研究[16]。控制器由滑模干扰观测器和反演控制器组成,滑模干扰观测器的作用是在线地估计表征建模不确定性的复合扰动的大小,并将其反馈给自适应反演控制器。自适应反演控制器采用反演法进行设计,使伸缩管姿态控制系统能够渐进地跟踪参考模型输出姿态指令,使系统的闭环响应与参考模型相近似(具体设计过程参考文献[16])。文献[16]的研究结果表明,该控制器具有较强的鲁棒性和良好的控制性能。
伸缩管控制系统整体结构图如图4所示,由杆指令整形、参考模型、自适应反演控制器、滑模干扰观测器、舵面执行机构以及伸缩管本体运动模型组成。其中,参考模型用于反映对闭环系统响应的期望,可以影响系统的输出响应,即不同的参考模型参数下闭环系统的响应特性不同。

图4 伸缩管姿态控制系统结构图Fig.4 Structure diagram of attitude control system of flying boom
2.2 参考模型
文献[6,12]通过修改控制系统中的参考模型参数得到了不同闭环响应特性的研究对象,进而获得了用于飞行品质研究的样本数据。为了获取伸缩管品质评定的试验样本,本文对参考模型在伸缩管控制系统中的作用进行了分析。根据文献[1]关于伸缩管系统传递函数的描述,伸缩管姿态响应可近似为二阶系统响应,因此为了让系统的输出更接近伸缩管原有的响应特性,本文采用如图5所示的二阶参考模型。
在图5中,幅值限制和速率限制的取值可依据实际情况进行设计,本文中指令信号的幅值限制设置为[-10°,10°](偏航)和[20°,40°](俯仰),由伸缩管的运动范围所决定。速率限制与伸缩管的舵面操纵能力有关,本文设置两个通道的速率限制为[-80,80](°)/s。
参考模型参数与伸缩管闭环系统响应存在一定的联系,为了比较在不同参数下伸缩管系统的姿态响应,本文给出多组不同参考模型参数下的伸缩管姿态阶跃响应。当操纵杆给出的杆指令经过参考模型后,可近似为一个二阶系统响应,伸缩管在其控制系统作用下,跟踪该指令信号。从图6可以看出,参考模型在一定程度上决定了系统的响应特性,参考模型参数对输出响应的影响与二阶系统的阻尼比以及固有频率对系统响应的影响类似。其中,ζ影响系统的超调量,当ζ≥1以后,系统的超调量为0。ωn影响系统的响应快慢,ωn越大说明系统响应越迅速。根据本文所采用的控制系统的这个特性,可以通过改变参考模型的ωn和ξ来获取不同响应特性的试验样本。

图5 参考模型结构Fig.5 Structure of reference model

图6 不同特征参数下的伸缩管响应Fig.6 Response of flying boom with different characteristic parameters
3 试验平台
本文试验在地面模拟器上完成,所用试验平台闭环框图如图7所示,整个试验平台的组成单元包括伸缩管操纵员、伸缩管操纵杆系统、计算机、伸缩管屏显系统。
在试验过程中,加油机在控制器的作用下保持定直平飞,伸缩管操纵员通过伸缩管操纵杆将操纵指令输入计算机中。在计算机中利用MAT-LAB软件建立仿真平台实时仿真计算加油机和伸缩管的运动状态,并将伸缩管的运动状态传输给基于Flight Gear软件的硬式空中加油视景系统,视景如图8所示。MATLAB仿真平台主要由3部分组成:加油机运动仿真模块、伸缩管运动仿真模块、飞行环境模块。加油机和伸缩管运动仿真模块都包含了各自的控制器、气动以及运动模型,从而建立关于加油机和伸缩管闭环系统的仿真模型,其中加油机的控制器保持加油机做定直平飞运动,而伸缩管的控制器(结构如图4所示)用于实现操纵员对伸缩管的操纵。飞行环境模块包含大气紊流和加油机尾流场,以模拟硬式空中加油伸缩管的操纵环境。Flight Gear软件建立了硬式空中加油视景系统,通过该视景系统可以得到伸缩管操纵员所需的视景图像,并通过屏显系统将视景图像展示给伸缩管操纵员。整个试验平台的计算主要涉及运动方程和操纵指令的求解以及Flight Gear软件视景的生成,计算量较小,能够满足实时计算的要求。

图7 试验闭环框图Fig.7 Closed-loop structure diagram of test

图8 伸缩管视景Fig.8 Scene of flying boom
4 基于任务的品质评定方法
基于任务的伸缩管操纵品质评定是通过设计反映硬式空中加油需求的伸缩管操纵任务试验对伸缩管的操纵品质进行评定。为了模拟实际的硬式空中加油需求,本文通过对实际的硬式空中加油任务进行模拟从而完成试验任务以及指令的设计。为了对试验结果进行评定,本文还设计了针对伸缩管操纵品质试验的评定方法。
4.1 操纵任务设计
飞行任务是基于任务的评定方法的核心,但是目前关于该方面的文献研究较少,如何选择合适的任务是使用基于任务的评定方法首先需要解决的问题。硬式空中加油任务主要要求伸缩管在操纵员的操纵下能够精确地跟踪受油口,从而完成对接,因此伸缩管的姿态跟踪能力是操纵品质评定的设计重点[18]。根据要求并且参考MIL-MIL-HDBK-1797A[19]关于多轴屏显跟踪任务的描述,设计了伸缩管姿态跟踪任务, 如表2所示。
在表2任务卡中定义了任务试验的考察目标、目标机动、试验的初始化状态和任务性能标准。其中目标机动主要通过屏幕上目标点的运动来实现,目标点的运动由伸缩管试验任务指令信号决定。试验开始时,伸缩管位于初始预定平衡状态,加油机做定直平飞运动。试验结果的评价主要从试验任务结果的好坏和操纵员的工作强度这两方面进行,因此任务卡对任务性能进行了定义和描述。
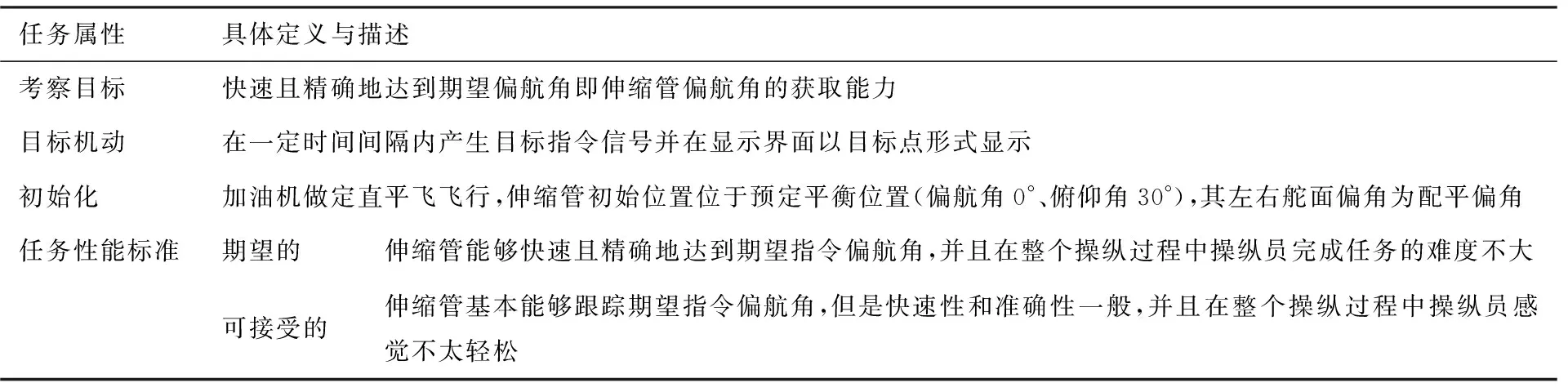
表2 姿态跟踪任务卡Table 2 Attitude tracking description sheet
4.2 任务目标指令设计
任务的目标指令信号用以反映伸缩管在硬式空中加油中的任务需求,而伸缩管在硬式加油过程中的主要任务是快速并精确对准受油机接口,因此,试验所用目标指令必须能真实地反映受油机受油口的相对位置变化。根据这一原则,任务的目标指令采用如下方法生成:在空中加油模拟器上,受油机驾驶员驾驶受油机进行硬式空中加油,驾驶员操纵飞机使其位于硬式加油点处并控制飞机相对于加油机尽量不发生相对运动。在这个过程中,受油机驾驶员将操纵飞机抵抗大气紊流以及加油机尾流场对飞机姿态与位置造成的扰动。输出在整个过程中受油机相对伸缩管的姿态,重复多次试验并选择最为适中的结果作为任务试验指令,本文最终采用的任务指令信号如图9所示。


图9 伸缩管指令信号Fig.9 Attitude command of flying boom
4.3 试验评定方法
结合MIL-F-8785C-80[20]关于飞机飞行品质的定义,给出了伸缩管操纵品质等级的定义:
等级1 伸缩管特别适合完成制定的飞行任务,在没有或较少的操纵员补偿下即可完成期望的加油任务。
等级2 伸缩管适合完成制定的飞行任务,但操纵员的工作负担有所增加或完成任务的效果有所降低,或两者兼有。
等级3 伸缩管操纵品质能满足操纵安全的要求,但操纵员的工作负担过重或完成任务的效果不好,或两者兼有。硬式空中加油任务很难完成。
对任务试验的评定包括两个方面:一是主观评定,操纵员利用Cooper-Harper评定标准结合任务的完成效果与操纵人员的主观感受进行操纵品质评分;二是客观评定,由试验工程师根据试验任务完成的客观情况给出伸缩管操纵品质的结论。
1) 主观评定
操纵员对伸缩管操纵品质的评定方法借鉴Cooper-Harper飞行品质评定流程以及其评定标准[21]。Cooper-Harper评定方法是从驾驶员任务完成负担上对飞机的操纵品质进行定性的描述,由于该方法不针对对象本身而是针对任务完成过程驾驶员的感受(完成任务容易或者困难),因此该方法同样适用于伸缩管。本文中,操纵员按照该流程和标准给出任务试验的伸缩管操纵品质的评定分数,其评分标准与Cooper-Harper保持一致,这样便于直观区分伸缩管的操纵品质等级。
2) 客观评定
客观评定是利用试验结果数据对操纵员操纵伸缩管完成任务情况进行评定。为了描述操纵品质试验任务的客观完成情况,本文还引入任务完成度的概念。参考MIL-HDBK-1797A[19],本文定义伸缩管操纵品质试验中任务完成度为姿态跟踪误差低于±0.5°的时间占整个任务时间的比例。±0.5°是一般受油机受油口的容许对接误差,因此任务完成度也反映了伸缩管在试验过程中完成对接的情况。
结合两种评定结果,本文对伸缩管操纵品质等级、驾驶员评定和任务完成度关系做出如表3所示规定。利用主客观评定结果以及表3即可完成对伸缩管操纵品质的评定。
根据本文对伸缩管本体特性的研究,伸缩管的运动主要包含偏航和俯仰两个模态。为了使评价的结果针对这2个模态进行,本文在地面模拟器上分别对偏航和俯仰二个姿态跟踪任务进行了试验。在单次试验时,只考虑单个自由度上的任务,以保证任务试验和操纵模态的一一对应。
1) 偏航姿态跟踪评定
以其中一组样本(其偏航参考模型固有频率为4.00 rad/s,阻尼比为0.82)为例,经过多次试验之后(图 10为其中一组试验结果),参与试验的操纵员给出Cooper-Harper评分为1.5分,试验工程师通过对试验数据进行分析,发现在试验过程中,伸缩管偏航角跟踪误差在±0.5°内的时间比例为59.81%,其跟踪效果达到期望的等级。因此结合表 3给出的关系,认为在该组参数下,伸缩管的操纵品质达到1级标准。
2) 俯仰姿态跟踪评定
俯仰姿态跟踪任务的评定与偏航任务的评定方法相同,以其中一组样本(其俯仰参考模型固有频率为3.75 rad/s,阻尼比为0.88)为例,经过多次试验之后(图 11为其中一组试验结果),操纵员给出Cooper-Harper评分为2分。试验工程师通过对试验数据进行分析发现在试验过程中,伸缩管偏航角跟踪误差在±0.5°内的时间比例为58.62%,其跟踪效果达到期望的等级。结合主观和客观的评定结果,本文认为在该组参数下,伸缩管的操纵品质达到1级标准。

表3 任务完成评定标准Table 3 Performance standard of task
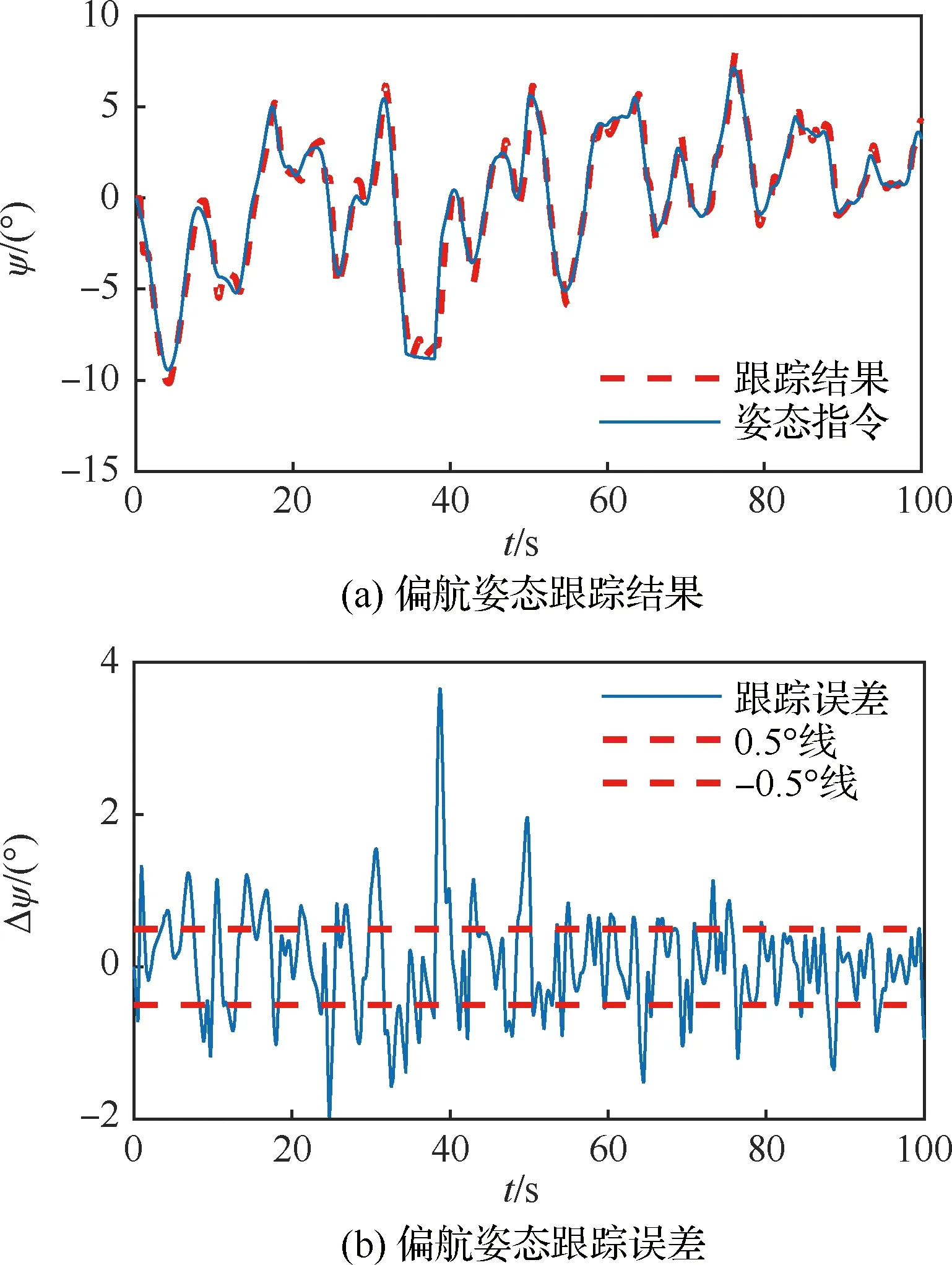
图10 偏航操纵品质试验结果(ωn=4 rad/s,ζ=0.8)Fig.10 Result of yaw axis handling quality test (ωn=4 rad/s,ξ=0.8)

图11 俯仰操纵品质试验结果 (ωn=3.75 rad/s,ξ=0.88)Fig.11 Result of pitch axis handling quality test (ωn=3.75 rad/s,ξ=0.88)
5 伸缩管操纵品质要求
低阶等效拟配方法是常用于评定飞机飞行品质的方法。本文采用低阶等效拟配方法获取作为试验样本的伸缩管闭环系统的低阶等效参数,再根据基于任务试验的评定结果,对硬式加油伸缩管的操纵品质要求进行分析。
5.1 低阶等效拟配
带有控制系统的伸缩管由本体以及控制系统等组成,系统阶次较高,且包含一些非线性环节。对于此类系统可以采用等效系统方法对其进行分析与评定。本文前面部分描述了参考模型参数对伸缩管姿态响应特性具有较大的影响,伸缩管姿态响应与参考模型参数具有一定的联系。因此本文通过修改参考模型的参数,再利用等效拟配方法求得其在不同参考模型参数下的低阶等效系统参数,从而获得不同的低阶等效模型。
低阶等效系统的模型选择至关重要,而飞机和伸缩管存在较大的区别。首先飞机气动外形由机身、升力面、安定面以及操纵面等组成,而伸缩管主要由管体组成并安装于主硬管尾部;其次,飞机的运动模型由质心运动和绕质心的转动组成,而伸缩管的运动模型由绕万向节的铰链点的姿态运动组成,并且万向节的铰链点安装在伸缩管前端,不与质心重合;再次,飞机在大气中飞行处于自由状态,而伸缩管由前端的万向节约束,万向节限制了伸缩管的质心运动和伸缩管滚转转动运动。文献[5, 15]表明,伸缩管偏航和俯仰通道的姿态响应近似为二阶系统响应。因此令系统偏航通道和俯仰通道的低阶等效模型分别为
(1)

(2)
式中:Wψ和Wθ分别为操纵杆偏航和俯仰的杆位移;Kψ和Kθ分别为偏航和俯仰的增益参数;ξψ和ξθ分别为偏航和俯仰的阻尼参数;ωψ和ωθ分别为偏航和俯仰的固有频率。可以通过MIL-STD-1797A推荐的方法和检验拟配结果的幅相包络曲线对伸缩管的低阶等效拟配模型进行求解。因为人有意识的操纵主要集中在0.1 ~10 rad/s,所以本文选择在该频域范围内对伸缩管进行低阶等效拟配。
通过对试验样本进行低阶等效拟配,可以获得样本的低阶等效模型参数。根据飞机飞行品质的研究理论,低阶等效模型的参数可以反映操纵品质的特性,研究低阶等效模型参数与任务试验结果之间的关系,可以得出伸缩管操纵品质要求。
5.2 操纵品质要求
通过对多个样本进行任务试验,可以获得较为丰富的试验结果。再对这些样本低阶等效拟配,获得每个样本所对应的等效参数。一般而言,固有频率和阻尼比几乎可以描述二阶系统的所有特征参数。因此,本文将伸缩管的低阶等效系统的固有频率和阻尼比作为伸缩管操纵品质的评定参数。
为了分析伸缩管操纵品质的要求,对多个样本进行任务试验与评定,并计算了这些样本的低阶等效拟配参数。根据试验结果和低阶模型的固有频率以及阻尼比的关系,绘制了伸缩管操纵品质的边界(见图 12)。从图中可以看出,伸缩管偏航和俯仰通道的一级操纵品质区域被二级操纵品质包围,其中一级操纵品质边界呈“V”形,二级与三级之间的边界呈“U”型。与俯仰操纵不同,由于伸缩管的动力学特性以及操纵杆的形式,操纵员进行偏航操纵容易附带有俯仰操纵,操纵员要经过一段时间的训练才能消除偏航时的俯仰操纵,并且在操纵过程中需要付出一部分精力来完成这一操纵,因此与俯仰操纵相比,偏航操纵难度更大。

图12 操纵品质要求Fig.12 Requirements of handling qualities
可以利用伸缩管的等效系统(式(1)和式(2))来解释图12中的操纵品质要求。根据文献[22],固有频率增大,则等效系统响应更快,伸缩管更灵敏。因此固有频率越大,越容易获得较好的操纵品质,故在图中固有频域大的区域更易达到一级品质。阻尼比从0增大到1时,随着阻尼比的增加,等效系统的超调量减小且调节时间减小,系统的动态响应得到改善,因此操纵品质变好。而当阻尼比大于1时等效系统为过阻尼系统,随着阻尼比的增加,系统响应变慢,操纵品质逐渐变差。因此在图12中偏航和俯仰通道的一级操纵品质区域形状近似一个“V”形区域。
图12反映了操纵品质对伸缩管设计的要求,给出操纵品质的边界,设计人员可以根据图12,设计伸缩管的气动构型以及控制系统以达到要求的操纵品质等级。同时利用本文提出的低阶等效拟配方法,对伸缩管的闭环系统进行低阶等效拟配,再结合图 12的操纵品质要求,可以快速完成伸缩管偏航和俯仰通道操纵品质评定,从而判断设计是否满足要求。
6 结 论
本文对伸缩管的本体特性以及伸缩管控制系统设计进行了叙述与分析,设计了伸缩管操纵品质试验并在模拟器上对不同操纵品质参数下的伸缩管进行了任务评定。利用低阶等效拟配方法获得了试验样本的低阶等效参数,并结合任务评定结果最终对伸缩管偏航轴和俯仰轴的操纵品质要求进行了研究。
1) 伸缩管的运动分为偏航和俯仰2个运动模型,这2个模态均存在阻尼不足的特点。伸缩管偏航和俯仰的低阶等效模型为二阶系统,通过低阶等效方法可以获得其相应的等效系统。
2) 利用基于任务的操纵品质评定结果,结合低阶等效模型的固有频率和阻尼比,得到了偏航以及俯仰操纵品质的边界,其中一级操纵品质边界呈“V”形,二级与三级之间的边界呈“U”形。由于操纵杆的特性,一般而言,进行偏航操纵时容易夹带俯仰操纵,使得偏航操纵任务更难完成,因此偏航操纵品质的一级与二级操纵品质区域相对于俯仰操纵品质的区域更“狭窄”。
3) 本文提出的方法可用于伸缩管闭环操纵品质的评定,提出的操纵品质边界可作为伸缩管以及其控制系统设计的设计边界,为设计提供理论支撑。此外,本文所提出的方法可为类似伸缩管这类完成特定任务且有操纵品质要求的器械或者飞行器的操纵品质评价提供研究思路和基础。
[1] CHRISTOPHER B, KLAUS J D. Air force aerial refueling methods: Flying boom versus hose-and-drogue: ADA454450[R]. Washington, D.C.: DTIC, 2005.
[2] 全权, 魏子博, 高俊, 等. 软管式自主空中加油对接阶段中的建模与控制综述[J]. 航空学报, 2014, 35(9): 2390-2410.
QUAN Q, WEI Z B, GAO J, et al. A survey on modeling and control problems for probe and drogue autonomous aerial refueling at docking stage[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(9): 2390-2410 (in Chinese).
[3] 陆宇平, 杨朝星, 刘洋洋. 空中加油系统的建模与控制技术综述[J]. 航空学报, 2014, 35(9): 2375-2389.
LU Y P, YANG C X, LIU Y Y. A survey of modeling and control technologies for aerial refueling system[J]. Acta Aeronautica et Astronautica Sinica, 2014,35(9):2375-2389 (in Chinese).
[4] THOMAS P R. Advances in air to air refueling[J]. Progress in Aerospace Sciences, 2014, 71(1): 14-35.
[5] YANG C X, LIU Y Y, LU Y P. Flying qualities evaluation of aerial refueling boom with stability augmentation system[C]∥Proceedings of 2014 IEEE Chinese Guidance, Navigation and Control Conference. Piscataway, NJ: IEEE Press, 2014: 1132-1138.
[6] 候天俊, 郭有光, 王立新. 基于任务的飞机大迎角飞行品质评定准则[J]. 北京航空航天大学学报, 2015, 41(9):1736-1741.
HOU T J, GUO Y G, WANG L X. Mission-oriented flying qualities criteria for high angle of attack aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(9): 1736-1741 (in Chinese).
[7] DAVID J, DAVID R, KEVIN D. Aircraft maneuvers for the evaluation of flying qualities and agility (v1): WL-TR-93-3801[R]. Washington, D.C.: DTIC, 1993.
[8] DAVID J, DAVID R, KEVIN D. Aircraft maneuvers for the evaluation of flying qualities and agility (v2): WL-TR-93-3801[R]. Washington, D.C.: DTIC, 1993.
[9] DAVID J, DAVID R, KEVIN D. Aircraft maneuvers for the evaluation of flying qualities and agility (v3): WL-TR-93-3801[R]. Washington, D.C.: DTIC, 1993.
[10] 龙晋伟, 潘文俊, 王立新. 战斗机动态逆控制律对比研究[J]. 飞行力学, 2013, 31(4): 297-300.
LONG J W, PAN W J, WANG L X. A comparison of nonlinear dynamics inversion control designs for a fighter aircraft[J]. Flying Dynamics, 2013, 31(4): 297-300 (in Chinese).
[11] CHRISTOPHER J. Nonlinear dynamic inversion baseline control law: Architecture and performance predictions: AIAA-2011-6467[R]. Reston, VA: AIAA, 2011.
[12] 李淼, 王立新, 黄成涛. 舵面特性对飞翼构型作战飞机短周期品质的影响[J]. 航空学报, 2009, 30(11): 2059-2065.
LI M, WANG L X, HUANG C T. Influence of control surface characteristics on short period mode flying qualities for flying wing aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2009, 30(11): 2059-2065 (in Chinese).
[13] 梁锋, 张林昌, 李春锦. 评定飞行品质的等效系统法[J]. 航空学报, 1988, 9(11): 581-585.
LIANG F, ZHANG L C, LI C J. Equivalent systems method to evaluate the flight qualities[J]. Acta Aeronautica et Astronautica Sinica, 1988, 9(11): 581-585 (in Chinese).
[14] 周堃, 王立新, 谭详升. 放宽静稳定电传客机纵向短周期品质评定方法[J]. 航空学报, 2012, 33(9): 1606-1615.
ZHOU K, WANG L X, TAN X S. Handling qualities assessment of short period mode for fly-by-wire passenger airliner with relaxed static stability design[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(9): 1606-1615 (in Chinese).
[15] 杨朝星, 刘洋洋, 陆宇平. 变质量分布硬式加油管建模与反演自适应控制[J]. 系统工程与电子技术, 2015, 37(4): 911-917.
YANG C X, LIU Y Y, LU Y P. Modeling and backstepping adaptive control of refueling boom with variable mass distribution[J]. System Engineering and Electronics, 2015, 37(4): 911-917 (in Chinese).
[16] CAO H Z, WANG L X, YUE T. Design of flying boom controller before and after docking[C]∥Proceedings of 2016 IEEE Guidance, Navigation and Control Conference (CGNCC). Piscataway, NJ: IEEE Press, 2016: 1375-1380.
[17] MILLER C. Nonlinear dynamic inversion baseline control law: Flight-test results for the full-scale advanced systems testbed F/A-18 airplane[C]∥AIAA Guidance, Navigation, and Control Conference. Reston, VA: AIAA, 2013.
[18] CHRISTOPHER J. A handing qualities investigation of selected response-types for the air refueling task[C]∥AIAA Atmospheric Flight Mechanics Conference. Reston, VA: AIAA, 1995: 30-40.
[19] U.S. Department of Defense. Flying qualities of piloted aircraft: MIL-HDBK-1797A[S]. Arlington: Department of Defense, 1997.
[20] U.S. Department of Defense. Flying qualities of piloted airplane: MIL-F-8785C-80 [S]. Arlington: Department of Defense, 1980.
[21] HARPER R P, COOPER G E. Handling qualities and pilot evaluation[J]. Journal of Guidance, Control, and Dynamics, 1986, 9(5): 515-529.
[22] FRANKLIN G F, POWELL J D. Feedback control of dynamic systems [M]. New York: Pearson, 2007: 62-64.
附录A
伸缩管的运动模型为绕万向节转动的姿态运动,文献[16]给出了描述伸缩管姿态运动的刚体运动模型。利用飞机的小扰动线化原理和方法对文献[16]给出的伸缩管动力学方程线化,可得

(A1)
式中:
(A2)
(A3)

(A4)

(A5)
(A6)
(A7)
g1=Izcos2θ+2Ixzcosθsinθ+Ixsin2θ
(A8)
