单轨道山地果园运输机齿条齿形优选
2018-04-16李善军张衍林马攀宇张朝宇
李善军,刘 辉,张衍林,陈 红,孟 亮,马攀宇,张朝宇,张 池
(1. 华中农业大学工学院,武汉 430070;2. 国家现代农业(柑橘)产业技术体系,武汉 430070;3. 农业部长江中下游农业装备重点实验室,武汉 430070)
0 引 言
丘陵地区山地果园的机械化运输是果园作业的核心需求[1]。近年来,国内外学者对山地果园运输机进行了大量研究,形成了以履带式运输机、轮式运输机、架空索道[2-3]、牵引式无轨运输机[4-5]、单轨道运输机[6-10]和双轨道运输机[11-12]为主要代表的各类农用运输机械,对降低果农劳动强度、提高作业效率、促进果园发展等具有重要意义。
华中农业大学在国家现代农业(柑橘)产业技术体系支持下自主研发并推广应用了单轨道山地果园运输机[13],该运输机机型小巧,运载能力强,可在复杂的地形铺设,且较双轨运输机铺设成本低,较索道式运输机[14]稳定性更好,且操作更为简便,能够较好满足使用要求。该运输机轨道齿条齿形为圆弧齿形,但圆弧齿形轨道对中心距、齿距的误差敏感性很大,因而这 2项误差对力学性能影响很大。另外,驱动轮作为运输机的主要耗能部件(特别是对于长距离、大运量运输机),研究不同轨道齿条齿形对单轨道山地果园运输机力学性能的影响具有重要研究意义。
除了对各类运输机的机型进行设计外,专家学者还对运输机的关键部件进行了大量研究[15-19],但却较少研究轨道齿条齿形对运输机力学性能的影响。相比之下,专家学者对齿轮、链轮、销轮齿形的研究开展较早。Honda等[20-21]围绕摆线滚轮齿轮传动发表了一系列研究报告。申兆亮等[22-24]通过对不同齿形链轮及与它们配套的传统滚子传动系统进行了多刚体动力学分析,并从理论上提出了修正链轮齿形的方法。王振乾[25]对不同齿形的采煤机行走轮进行了运动学特性分析。上述研究为单轨道山地果园运输机的齿条齿形优化及优选提供了理论参考。
为有效提高该单轨道山地果园运输机的力学性能及运输效率,减小运输机能耗及成本,改善因齿距误差累积造成的运输车运行抖动、卡齿等问题,本文在理论分析单轨道山地果园运输机驱动轮与轨道齿条啮合条件后,设计并加工制造了不同齿形的齿条轨道。以运输机驱动轮旋转角速度、轨道坡度、齿条齿形为考察因素,以驱动轮与不同齿形齿条啮合时所需提供的驱动扭矩为评价指标开展力学性能试验,以期为该单轨道山地果园运输机的轨道结构优化设计提供参考。
1 运输机驱动轮结构及工作原理
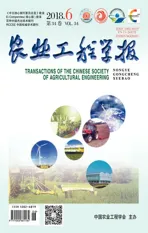
该单轨道山地果园运输机[13]主要由主车、拖车、驱动系统、传动系统、刹车系统等组成,驱动轮为整机传动系统的核心部件,结构如图 1所示。驱动轮两侧驱动盘通过轮毂与驱动轴连接,两侧驱动盘间均布11个滚子结构(销轴、套筒焊在两侧驱动盘上),滚子与套筒间隙配合。
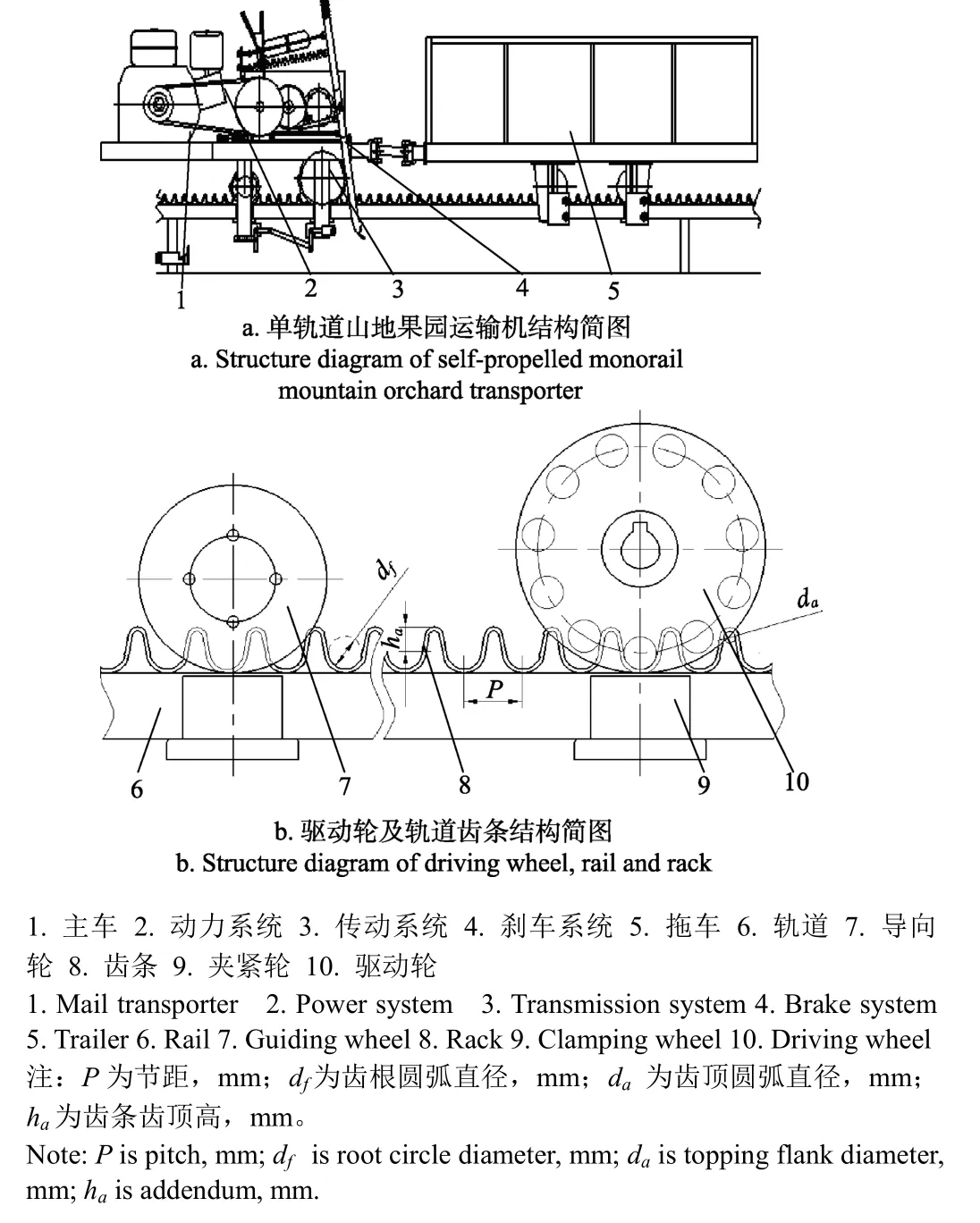
图1 运输机及驱动轮示意图Fig.1 Diagram of monorail mountain orchard transporter and driving wheel
在驱动过程中,驱动轮两侧驱动盘轮缘承受载质量,各滚子与齿条进行啮合传动,从而驱动轮由旋转运动变成直线运动。齿条按节距和啮合要求设计加工,点焊在轨道上,夹紧轮则通过与轨道配合防止运输机在运行过程中脱离轨道。
2 驱动轮-齿条啮合分析
2.1 驱动轮基本结构参数
以运输机(主车)为研究对象,对主车上驱动轮与齿条啮合过程进行原理分析。驱动轮驱动性能计算所用的基本参数为:主车载质量为 400 kg,驱动轮个数为 1个,导向轮个数为1个,夹紧轮个数为4个。
2.2 齿条基本结构参数
为研究不同齿形对驱动轮力学性能的影响,本文设计并加工制造了链轮齿形齿条轨道、销齿齿形齿条轨道、摆线齿形齿条轨道[26],并对驱动轮与该不同齿形齿条(包括圆弧齿形齿条)啮合过程进行对比分析。此 4种齿条相关特性参数如表1所示,结构如图2所示。
2.3 驱动轮与不同齿形齿条啮合分析
运输机在运行过程中,驱动轮与齿条啮合时产生阻力扭矩Te,导向轮受到垂向作用力W1及摩擦阻力f1,驱动轮受到垂向作用力W2及摩擦阻力f2,4个夹紧轮分别受摩擦阻力,运输机运行所需要提供的驱动力矩应不小于各工况下最大阻力扭矩。驱动轮、导向轮及夹紧轮受力如图3所示。
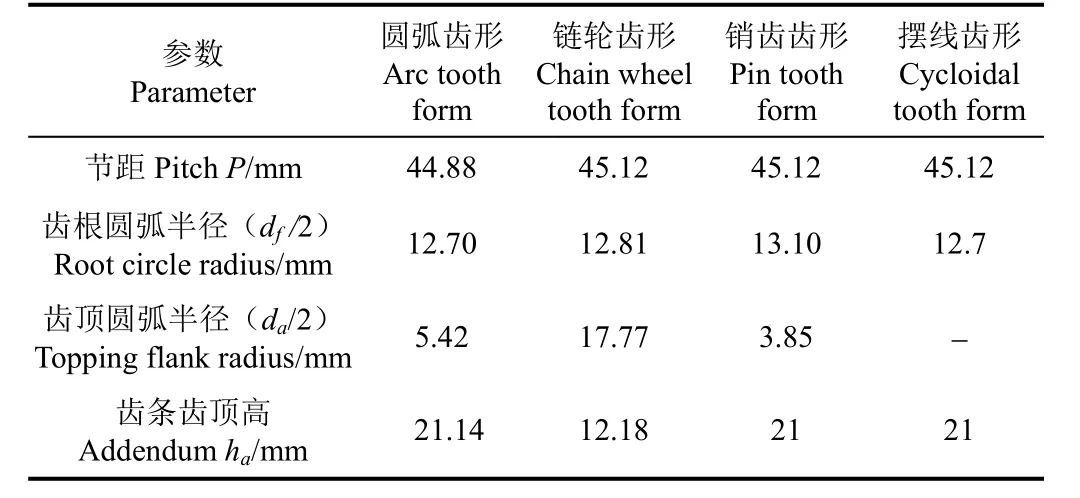
表1 齿条相关特性参数Table 1 Characteristic parameters of racks

图2 不同齿形齿条结构图Fig.2 Structure diagram of racks of kinds of tooth forms
图3 传动系统及夹紧轮受力图Fig.3 Stress diagram of transmission system and clamping wheels

若将作用在运输机上各力对驱动轮中心o点取力矩,根据受力平衡有式中Td为运输机正常运行时所需提供的驱动扭矩,N·m;Te为驱动轮与齿条啮合时产生的阻力扭矩,N·m;fc1为导向轮处夹紧轮(2个)所受摩擦力,N;f1为导向轮轮缘所受摩擦力,N;f2为驱动轮两侧驱动盘轮缘所受摩擦力,N;fc2驱动轮处夹紧轮(2个)所受摩擦力,N;R为驱动轮半径,m;h为夹紧轮中心到驱动轮圆心的垂直距离,m;L为运输机轴距,m。
在运输机稳定运行情况下,导向轮轮缘所受摩擦力f1在驱动轮中心产生的力矩 f1R、驱动轮轮缘所受摩擦力f2在驱动轮中心产生的力矩 f2R、夹紧轮产生的摩擦力矩及导向轮处W1在驱动轮中心产生的矩W1L均为定值,故可将(1)式简化为

Δ为定值。又由驱动轮与齿条的啮合原理[26-28]可知,在传动过程中始终有2~3个滚子与齿条处于接触状态,并有1~2个滚子与齿条处于啮合传力状态,结合图3可知

式中αi为齿与滚子啮合时的齿廓压力角,(°)。设齿条对滚子 i的作用力为 Fi(i =1 ,2,… ,n ),N;n为传动瞬时的啮合齿数;Φi为滚子i对应的驱动轮转角,(°)。
在 Fi的作用下,啮合点处的接触变形使驱动轮产生变形转角ΔΦ,从而使各滚子中心在啮合点的公法线方向上产生变形δi。又假定啮合力F0、F1……Fn-1和相应变形δ0、δ1……δn-1成线性关系,由此可得:

式中δi为各啮合副的接触变形,m;li为第i个啮合点的公法线到滚子中心的距离,m;k为滚子与齿条的啮合刚度,N·m。又由驱动轮的力矩平衡条件得

3 样机试制与台架试验
3.1 试验条件
根据单轨道山地果园运输机主车尺寸及试验条件进行了样机试制及试验台架试制,并按照齿条相关特性参数用等离子切割机切将齿条割成型,点焊在轨道上。轨道由50 mm×50 mm的方钢焊接而成,轨道下端焊有支脚,能与试验台架上的套筒相配合以固定轨道。当在试验台架上完成一种齿形试验后,拆卸该轨道,更换另一种齿形的轨道进行试验。试验于2017年7月10日-22日在华中农业大学机电工程实训中心进行。
3.2 试验仪器与设备
试验仪器与设备包括运输机(主车载质量为400 kg)、CYT-302型动态扭矩传感器(北京天宇恒创传感技术有限公司,精度±0.25%,量程0~200 N·m,每秒采集数据4次)、扭矩传感器扭矩转速功率测试仪(转速脉冲输入0.3 Hz~20 kHz,扭矩脉冲输入5~15 kHz,仪表内部测量分辨率可达1/1 000 000)、M400数据采集管理系统、电控箱、坡度尺等,试验装置及仪器连接如图4所示。

图4 台架试验及齿条实物Fig.4 Bench test and practical photo of racks
3.3 试验设计
为研究运输机驱动轮与不同齿形齿条啮合时产生的能耗大小,需要对驱动轮与齿条啮合时产生的阻力扭矩Te进行试验分析。由于运输车本身结构限制,Te不便于直接测量,而驱动轮与齿条啮合时所需提供的驱动扭矩Td的变化趋势又与Te的变化趋势相同(见式(2)),故认为Td的变化趋势能够表征Te的变化趋势。在运输车运行过程中,驱动轮与齿条啮合时产生的阻力扭矩Te越小,表明运输机在运行过程中产生的能耗越小,运输机正常运行所需提供的驱动扭矩越小,越有利于提高运输机的运输效率及降低运输成本。因此,本文选取齿条齿形、轨道坡度(工作参数)、驱动轮转速(工作参数)作为考察因素,选取运输机正常运行所需提供的驱动扭矩Td作为评价指标设计试验。
4种齿形的轨道长度均为12 m,轨道两端各取3 m作为准备区,中间4 m作为数据采集区。试验时,人为调节电控箱来控制运输机运行速度。当调节电控箱使运输机驱动轮逆时针旋转时,运输车后驱前进;当调节电控箱使运输机驱动轮顺时针旋转时,运输车前驱后退。当运输机在轨道上运行至轨道两端时触碰行程开关,液压制动器工作,死驱动轴,运输机停止运行。
轨道安装在可旋转调节坡度平台上,可人为调控轨道坡度,试验台架可旋转调节角度最大为 15°。通过由CYT-302型动态扭矩传感器、扭矩转速功率测试仪、M400数据采集管理系统组成的测试系统对试验数据进行采集和计算,每组试验重复3次并取平均值。
3.4 试验结果与分析
提取运输机运行测试段内15 s内的扭矩信号,得到驱动轮在运行过程中所需提供的驱动扭矩 Td值,如表 2所示。又提取驱动轮旋转角速度为+88.08 rad/s,轨道坡度为+0°、+6°、+12°时驱动轮与 4种齿形齿条啮合时的Td值来研究齿形对Td的影响,如图5所示。其余工况下驱动轮与4种齿形啮合时的Td值变化趋势与图5相同。
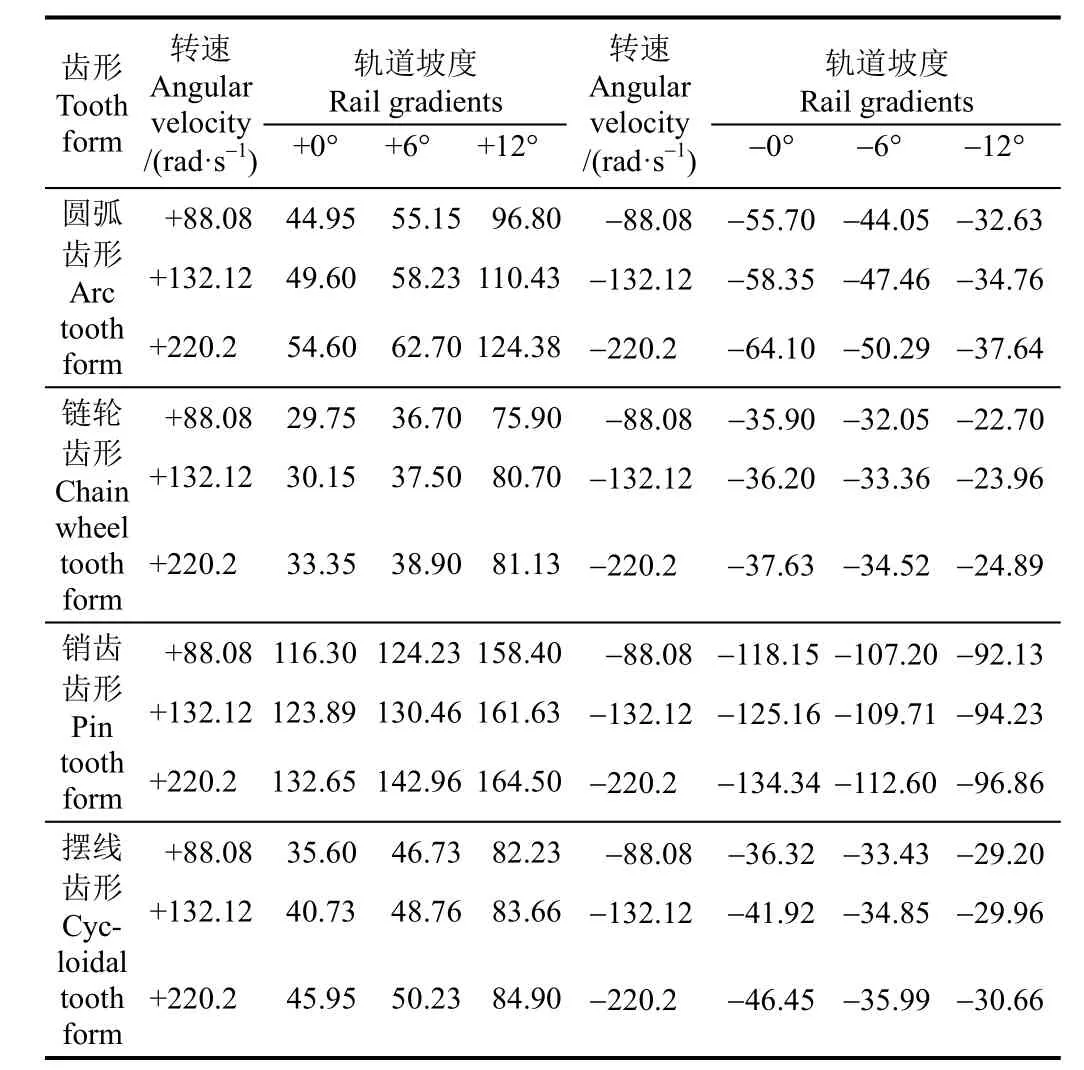
表2 不同工况下各驱动扭矩均值Table 2 Average values of driving torque under different conditions N⋅m
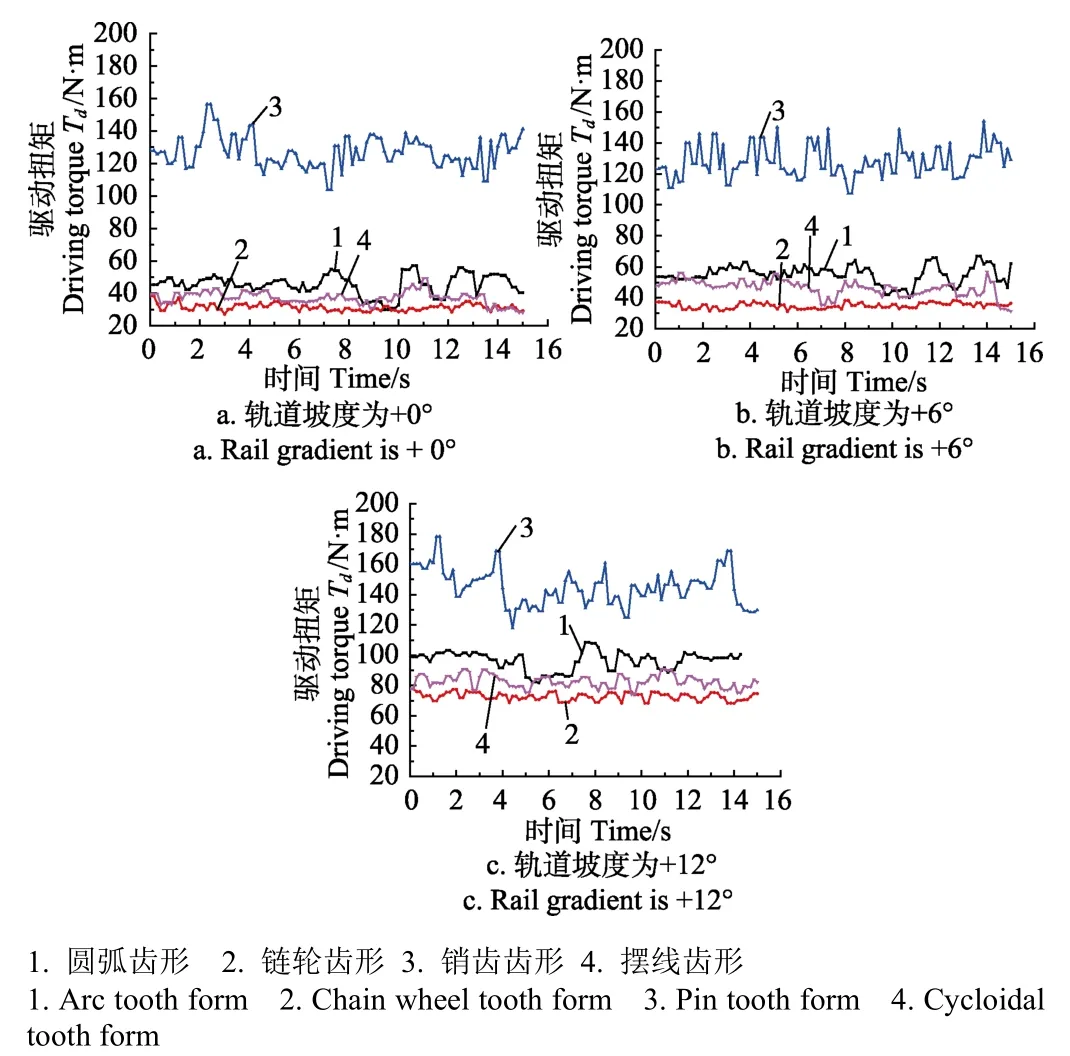
图5 转速为88.08 rad·s-1时,不同轨道坡度下驱动扭矩曲线Fig.5 Curves of driving torque under different rail gradients when angular velocity is 88.08 rad·s-1
由图5可得:1)齿条齿形对驱动轮与齿条啮合时所需提供的驱动扭矩Td影响较大,即对阻力扭矩Te及能耗影响较大;2)驱动轮以相同转速上坡时,坡度越大,驱动轮与齿条啮合时的Td越大,且波动幅度越大;3)在相同坡度下,驱动轮转速越大,驱动轮与齿条啮合产生的Td越大,能耗越大;4)驱动轮与销齿齿形齿条啮合时的Td最大,即驱动轮与销轮齿形齿条啮合时产生的阻力扭矩Te最大,且波动幅度最大;5)驱动轮与圆弧齿形齿条啮合时的Td较大,且15 s内Td前期较平稳,后突然减小,再突然增加,最后又趋于平稳。这是圆弧齿形轨道对中心距、齿距的误差敏感性很大造成的;6)驱动轮与摆线齿形齿条啮合时的Td较小,即驱动轮与摆线齿形齿条啮合时产生的阻力扭矩Te较小,且波动幅度明显小于销轮齿形和圆弧齿形;7)驱动轮与链轮齿形齿条啮合时的Td最小,即驱动轮与链轮齿形齿条啮合时产生的阻力扭矩Te最小,且波动幅度最小,故认为驱动轮与链轮齿形齿条啮合时产生的能耗最小。
又对图5a工况下的Td进行方差分析,结果如表3所示。取δ=0.05,F=2 962.31,P<0.000 1,表明齿形对 Td有极其显著的影响。且在此条件下,可得各Td的方差分别为 64.14、20.62、251.02、41.20,表明 Td波动幅度从小到大依次是驱动轮与链轮齿形齿条、摆线齿形齿条、圆弧齿形齿条、销轮齿形齿条啮合时产生的。对其他工况下的Td进行方差分析,均可得到相同结论。

表3 驱动扭矩方差分析Table 3 Variance analysis of driving torque
综上,由表2、表3和图5可知:1)驱动轮以相同转速上坡时,坡度越大,驱动轮与齿条啮合产生的阻力扭矩越大,能耗越大;以相同转速下坡时,坡度越大,驱动轮与齿条啮合产生的阻力扭矩越小,能耗越小;2)在相同坡度下,驱动轮转速越大,驱动轮与齿条啮合产生的阻力扭矩越大,能耗越大;3)分析驱动轮旋转角速度为+88.08 rad/s、轨道坡度为+0°时,15 s内驱动轮与4种齿形的轨道齿带啮合时产生的Td均值,得到驱动轮与链条齿形齿条、摆线齿形齿条啮合时产生的Td均值较圆弧齿形齿条分别减少33.82%、20.80%;驱动轮与销轮齿形齿条啮合时产生的Td均值较驱动轮与圆弧齿形齿条啮合时产生的Td均值增加158.73%;4)在驱动轮旋转角速度为+88.08 rad/s、轨道坡度分别为+0°、+6°、+12°时,驱动轮与链轮齿形齿条啮合时产生的Td均值较驱动轮与圆弧齿形齿条啮合时产生的 Td均值分别减小 33.82%,33.45%,21.59%;在驱动轮旋转角速度为-88.08 rad/s、轨道坡度分别为-0°、-6°、-12°时,驱动轮与链轮齿形齿条啮合时产生的Td均值较驱动轮与圆弧齿形齿条啮合产生的Td均值分别减小35.55%,27.24%,30.43%;5)分别分析驱动轮在不同转速,轨道在不同坡度下产生的Td,均能得到驱动轮与销轮齿形齿条啮合时产生的阻力扭矩最大,能耗最大,且波动幅度最大;与链轮齿形齿条啮合时产生的阻力扭矩最小,能耗最小,且波动幅度最小。故在相同条件下,认为链轮齿形齿条最优,其次分别为摆线齿形齿条、圆弧齿形齿条、销轮齿形齿条。因此,链轮齿形齿条较圆弧齿形齿条更适宜用于单轨道果园运输机的轨道运输中。
4 结 论
为减小运输机能耗及提高运输效率,该文基于力学性能的影响建立了运输机驱动轮与轨道齿条啮合的动力学模型,并对单轨道山地果园运输机齿条齿形进行优选,得到以下结论:1)齿条齿形对单轨道山地果园运输机力学性能影响较大;2)驱动轮与链轮齿形齿条啮合时产生的阻力扭矩最小,且波动幅度最小。在相同条件下,链轮齿形齿条综合性能最优,其次分别为摆线齿形齿条、圆弧齿形齿条、销轮齿形齿条;3)在驱动轮旋转角速度为+88.08 rad/s、轨道坡度分别为+0°、+6°、+12°、-0°、-6°、-12°时,驱动轮与链轮齿形齿条啮合时的驱动扭矩均值较驱动轮与圆弧齿形齿条啮合时的驱动扭矩均值分别减小 33.82%,33.45%,21.59%,35.55%,27.24%,30.43%。因此,链轮齿形齿条较其他齿形齿条更适宜用于单轨道山地果园运输机的轨道运输中。本文为单轨道山地果园运输机轨道的结构优化设计提供了参考。
[参考文献]
[1] 吴伟斌,赵奔,朱余清,等. 丘陵山地果园运输机的研究进展[J]. 华中农业大学学报,2013,32(4),135-142.Wu Weibin, Zhao Ben, Zhu Yuqing, et al. Research progress of hilly orchard transporter[J]. Journal of Huazhong Agricultural University, 2013, 32(4), 135-142. (in Chinese with English abstract)
[2] 洪添胜,苏建,朱余清,等. 山地橘园链式循环货运索道设计[J]. 农业机械学报,2011,42(6): 108-111.Hong Tiansheng, Su Jian, Zhu Yuqing, et al. Circular chain ropeway for cargo transportation in mountain citrus orchard[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(6): 108-111. (in Chinese with English abstract)
[3] 文韬,洪添胜,朱余清,等. 山地果园索道张紧调节自动控制装置的设计[J]. 农业工程学报,2011,27(6): 128-131.Wen Tao, Hong Tiansheng, Zhu Yuqing, et al. Design of automatic control device for ropeway tension adjustment in hilly orchard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011,27(6): 128-131. (in Chinese with English abstract)
[4] 株式会社 IHIスター. 牽引式農作業機:2009-67A[P].2009-01-08.
[5] 张俊峰,张唐娟,张衍林.山地橘园牵引式无轨运输车的设计[J].湖北农业科学,2012,51(10):2111-2113.Zhang Junfeng, Zhang Tangjuan, Zhang Yanlin. Design of the remote control traction transporter for mountainous orangery[J]. Hubei Agricultural Sciences, 2012,51(10):2111-2113.
[6] 李敬亚.山地果园单轨运输机的研制[D].武汉:华中农业大学,2011.Li Jingya. Research on Single-track Mountainous Orchard Transport[D].Wuhan: Huazhong Agricultural University,2011.
[7] 战延文,张学锋,刘长乐,等. 单轨运输车应用现状[J]. 林业机械与木工设备,2008,36(12): 45-47.Zhan Yanwen, Zhang Xuefeng, Liu Changle, et al. Present situations of monorail vehicles[J]. Forestry Machinery &Woodworking Equipment, 2008, 36(12): 45-47. (in Chinese with English abstract)
[8] 张俊峰,李敬亚,张衍林,等. 山地果园遥控单轨运输机设计[J]. 农业机械学报,2012,43(2):90-94.Zhang Junfeng, Li Jingya, Zhang Yanlin, et al. Design of remote control monorail transporter for mountainous orchard[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(2): 90-94. (in Chinese with English abstract)
[9] 张俊峰,张衍林,张唐娟.遥控牵引式单轨运输车的设计与改进[J]. 华中农业大学学报,2013, 32(3):130-134.Zhang Junfeng, Zhang Yanlin, Zhang Tangjuan. Design and improvement of the remote control traction monorail transporter[J]. Journal of Huazhong Agricultural University,2013, 32(3):130-134. (in Chinese with English abstract)
[10] 张俊峰,张衍林,张唐娟,等.自走式山地单轨运输机遥控系统的设计[J]. 华中农业大学学报,2012,31(6):130-134.Zhang Junfeng, Zhang Yanlin, Zhang Tangjuan, et al. Design of the remote control system for self-propelled mountainous monorail transporter[J]. Journal of Huazhong Agricultural University,2012,31(6):130-134.
[11] 郑祖江,田开凤,刘进,等.山地果园双轨软索运输机械化技术的研发[J].湖北农机化,2008(5):29-30.Zheng Zujiang, Tian Kaifeng, Liu Jin, et al. Research and development of double ropeway transportation mechanization technology[J] . Hubei Nongjihua,2008(5):29-30.
[12] 李善军,邢军军,张衍林,等. 7YGS-45型自走式双轨道山地果园运输机[J]. 农业机械学报,2011,42(8):85-88.Li Shanjun, Xing Junjun, Zhang Yanlin, et al. 7YGS-45 type self-propelled dual-track mountain orchard transport[J].Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(8): 85-88. (in Chinese with English abstract)
[13] 李学杰. 自走式山地果园单轨运输机的研制[D]. 武汉:华中农业大学, 2013.Li Xuejie. Research on Self-propelled Monorail Mountain Orchard Transport[D]. Wuhan: Huazhong Agricultural University, 2013. (in Chinese with English abstract)
[14] 杨洲,李伟,李君,等. 果园钢索牵引货运系统负载纵向稳定性控制[J]. 农业工程学报,2015, 31(1): 64-70.Yang Zhou, Li Wei, Li Jun, et al. Longitudinal stability control of orchard cable-driven hanging transport system[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(1): 39-47. (in Chinese with English abstract)
[15] 吴伟斌,游展辉,洪添胜,等. 山地果园轮式运输机自装卸装置的设计与分析[J]. 华中农业大学学报,2016, 35(4),113-120.Wu Weibin, You Zhanhui, Hong Tiansheng, et al. Designing and analyzing self-loading device in mountainous orchard transporter with wheels[J]. Journal of Huazhong Agricultural University, 2016, 35(4), 113-120. (in Chinese with English abstract)
[16] 吴伟斌,廖劲威,洪添胜,等. 山地果园轮式运输机车架结构分析与优化[J]. 农业工程学报,2016,32(11):39-47.Wu Weibin, Liao Jingwei, Hong Tiansheng, et al. Analysis and optimization of frame structure for wheeled transporter in hill orchard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016,32(11): 39-47. (in Chinese with English abstract)
[17] 欧阳玉平,洪添胜,苏建,等. 山地果园牵引式双轨运输机断绳制动装置设计与试验[J]. 农业工程学报,2014,30(18):22-29.Ouyang Yuping, Hong Tiansheng, Su Jian, et al. Design and experiment for rope brake device of mountain orchard traction double-track transporter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(18): 22-29. (in Chinese with English abstract)
[18] 贾闯,李加念,洪添胜,等. 山地果园单轨运输机超声波避障系统的设计与试验[J]. 农业工程学报,2015,31(增刊2):69-74.Jia Chuang, Li Jianian, Hong Tiansheng, et al. Design and test of ultrasonic obstacle avoidance system for mountain orchard monorail conveyor [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(Supp.2): 69-74. (in Chinese with English abstract)
[19] 张凯鑫,张衍林,周波,等. 果园运输机单轨道橡胶辊驱动装置驱动性能研究[J]. 农业机械学报,2013,44(增刊2):111-116.Zhang Kaixin, Zhang Yanlin, Zhou Bo, et al. Driving performance of single-track rubber roller driving device[J].Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp.2): 111-116. (in Chinese with English abstract)
[20] Honda H, Makino H. Research on the trochoidal gears (1st report)-classification and basic formulas of the trochoidal gears[J]. JSPE, 1994, 60(7): 949-953.
[21] Honda H. Research on the trochoidal gears (2nd report)-pressure angle of the trochoidal gears and modification of tooth profile[J]. JSPE, 1995, 61(2): 208-212.
[22] 申兆亮. 基于 ADAMS仿真新型滚子链链轮齿形的研究[D]. 济南:山东大学,2010.Shen Zhaoliang. Study on New Profile of Roller Chain Sprocket Based on ADAMS[D]. Jinan: Shandong University,2010. (in Chinese with English abstract)
[23] Pedersen S L. Model of contact between rollers and sprockets in chain-drive systems[J]. Archive of Applied Mechanics,2005, 74(7): 489-508.
[24] Pedersen S L, Hansen J M, Ambrosio J A C. A roller chain drive model including contact with guide-bars[J]. Multibody system Dynamics, 2004, 12(3): 285-301.
[25] 王振乾. 滚筒式采煤机行走机构运动学分析及强度研究[D]. 北京:煤炭科学研究总院,2007.Wang Zhenqian. Kinematics Analysis and Strength Study for Haulage Mechanism of Drum Shearer[D].BeiJing: China Coal Science Research Institute, 2007. (in Chinese with English abstract)
[26] 成大先. 机械设计手册[M]. 北京:机械工业出版社,2010.
[27] Terada H, Makino H, Imase K. Fundamental analysis of linear type trochoidal gear ( 1st report )-motion principle of trochoidal cam rack[J]. JSPE, 1997, 63(11): 1609-1613.
[28] 张芸,张鹏,鲍兵兵. 次摆线滚轮齿条传动啮合副力学性能研究[J]. 机械传动,2016,40(6):27-31.Zhang Yun, Zhang Peng, Bao Bingbing, et al. Research of mechanical property of trochoid roller pinion rack transmissions[J]. Mechanical Transmission,2016, 40(6): 27-31.
[29] 余庆跃,李哲. 现代机械动力学[M]. 北京:北京工业大学出版社,1988.
[30] 万长森.滚动轴承的分析方法[M].北京:机械工业出版社,1987.