基于PLC的简易停车场控制系统设计
2018-01-29陈寿坤郑清兰
陈寿坤,郑清兰
(闽南理工学院实践教学中心,福建石狮362700)
“开车容易停车难”已成为各场所及居住小区较为突出的问题.对中小城市各种场所及小区停车场进行分析,发现早期的停车场都是平面建设,占地面积较大,能容纳车的数量较少,导致目前大部分停车场车位都不够用,造成了路边随意停车等现象,既占用了人们出行的通道又给生活带来一定的困扰.我国当前使用的智能车库存在存取麻烦、结构复杂等问题.从国外进口的产品价格贵,使用者交的费用较多,不被市场看好.设计立体的并适合我国大众能接受的停车场成为当前的紧要任务.建立立体、智能的停车场是解决当前问题的根本.本文设计的智能立体停车场,集电学、光学与计算机科学为一体,并采用PLC为核心控制,实现了停车场从地面向空中发展,使得停车场的占地面积减小,停车场的容量变大.采用PLC实现较为可靠,且体积小,维护方便,可扩展的空间大[1].
1 立体停车场结构及原理
立体停车系统结构示意图见图1,整个结构主要是地上3层,每层2行3列共14个车辆存放位.整个装置主要有框架、载车板、移动装置、检测及报警装置等组成.
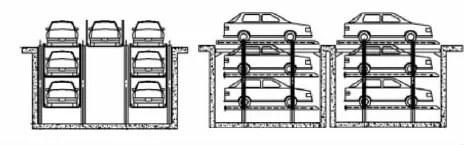
图1 立体停车系统结构
框架设计采用钢结构,由钢铸成各种不同的形状,包括外部支撑柱、横梁、竖梁等.通过不同的螺栓组装面成.
移动系统主要通过不同的电动机拖动来实现载车板的上升下降、左右移、前后移运动.其中上升和下降由一台电动机控制,电动机正转则载车板上升,反转则下降;左右移动由一台电动机的正反转来控制;前后移动由一台电动机的正反转分别控制[2].
检测系统部分由各类传感器、光电开关及接近开关等构成,实现车辆到位情况的检测.车辆停放位置的检测由接近开关来控制,并将其安装在载车板的左边和右边.光电开关用来显示相应车位上是否有车,当要存车时按下要存的车位号码按钮,若该车位已有车停放,则系统会报警提示.各层车位布置图见图2.
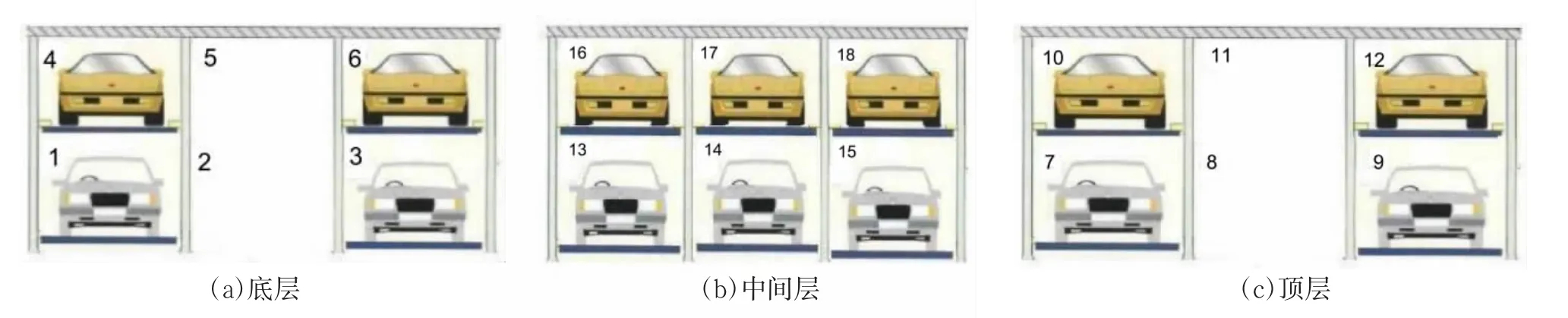
图2 各层车位布置
1.1 停车场底层运行原理
停车场底层分布见图2(a),采用2行3列设计,其中中间一列为非停车区,用来给载车板左、右移动提供空间,4个有效车位上都有一个用来停放车辆的载车板.
底层车辆的停放过程,1号和3号无需移动载车板,可直接进行车辆停放;若要在4号位置进行停车或取车操作时,必须先将1号的载车板移开,移到2号的空位处,再将4号的载车板前移到1号位置即可进行停车或取车;6号位置的停、取与4号位置相同.
1.2 停车场中间层运行原理
停车场中间层车位布置见图2(b),共有4个有效停车位,中间一列为空,用来供载车板的左、右移动和顶层车板的上、下移动.
中间层车辆停放过程,当要把车停放在7号车位时,应将底层的1号位置先空出来,7号的载车板下降至1号的位置,就可进行停、取车.完成后,将7号载车板上升到原位置,1号载车板复位.当要把车停入在10号车位时,应将1号和4号载车板空出,将10号载车板下降到4号的空位处,然后前移到1号的位置,即可进行停、取车.完成后将所有载车板复位.其中9号车位的运动情况与7号类似,12号与10号类似[3].
1.3 停车场顶层运行原理
停车场顶层车位布置图见图2(c),该层共有6个有效车位,中间无空位,该层载车板只进行上、下运动和前、后运动.
顶层车辆停放过程,当要用13号时,先将7和1号载车板移开,再将13号的载车板下降到1号的位置,就可进行停、取车操作,完成后再将13号载车板复位即可,7和1号载车板复位.当要用16号时,首先将10号和4号载车板先右移到空位,再将16号载车板下放置10号处,然后前进到1号的位置,就可进行停、取车.完成后将所有载车板复位.14号和17号车位停、取车较简单,只需将载车板下降到底层即可.其中18号车位的运动情况与16号类似,15号与13号类似.
2 系统总体设计方案
系统采用三菱FX2N-128MT的PLC.系统总体硬件电路见图3,包括检测部分、控制部分.其中检测部分主要是由各类传感器、接近开关及控制按钮等组成,控制部分主要包括由各种控制电动机电路,报警电路和显示电路等.当用户要存、取车时,首先是按下启动按钮,相应的检测信号送入PLC中,由PLC分析系统进行分析,并将信号送给电机控制电路等机构,进而完成载车板的各种运动,完成存、取车的过程.
2.1 PLC输入/输出模块
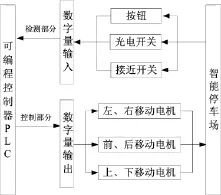
图3 系统总体控制
PLC的输入模块负责将接收到的输入信号(即检测信号等)送到PLC编程器中.本设计的输入设备有控制按钮,各种传感器等.共需要35个输入信号,48个输出信号(见图4).
输出模块的作用是将PLC分析后的信号送给各执行负载,从而控制各功能电动机的动作,系统的显示等.输出模块主要由交流接触器、时间继电器、数码管等组成.
2.2 系统电气控制原理
电气控制原理部分有主电路、控制电路.主电路主要是停车库中每个车位的主控电气部分,包括移动载车板的电动机,接触器的主触点等.控制电路的作用是实现主电路中各电动机运行状态控制的接线装置.
整个装置共需8台电动机控制载车板左右移动,7台电动机控制前后移动的电动机,10台电动机控制上下移动.为保证线路安全,在电路中设有短路保护和过载保护,用两个交流接触器分别控制电机的正、反转.2.2.1底层控制系统
根据系统控制要求,底层共有4个车位,1号和3号位可直接停、取车.4和6号车位载车板运动原理相似,下面以4号车位分析底层载车板的运行,示意图见图5(a).
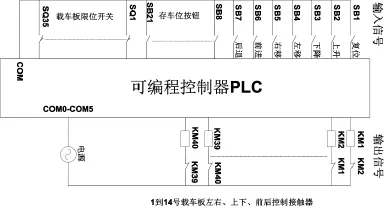
图4 输入、输出信号框图
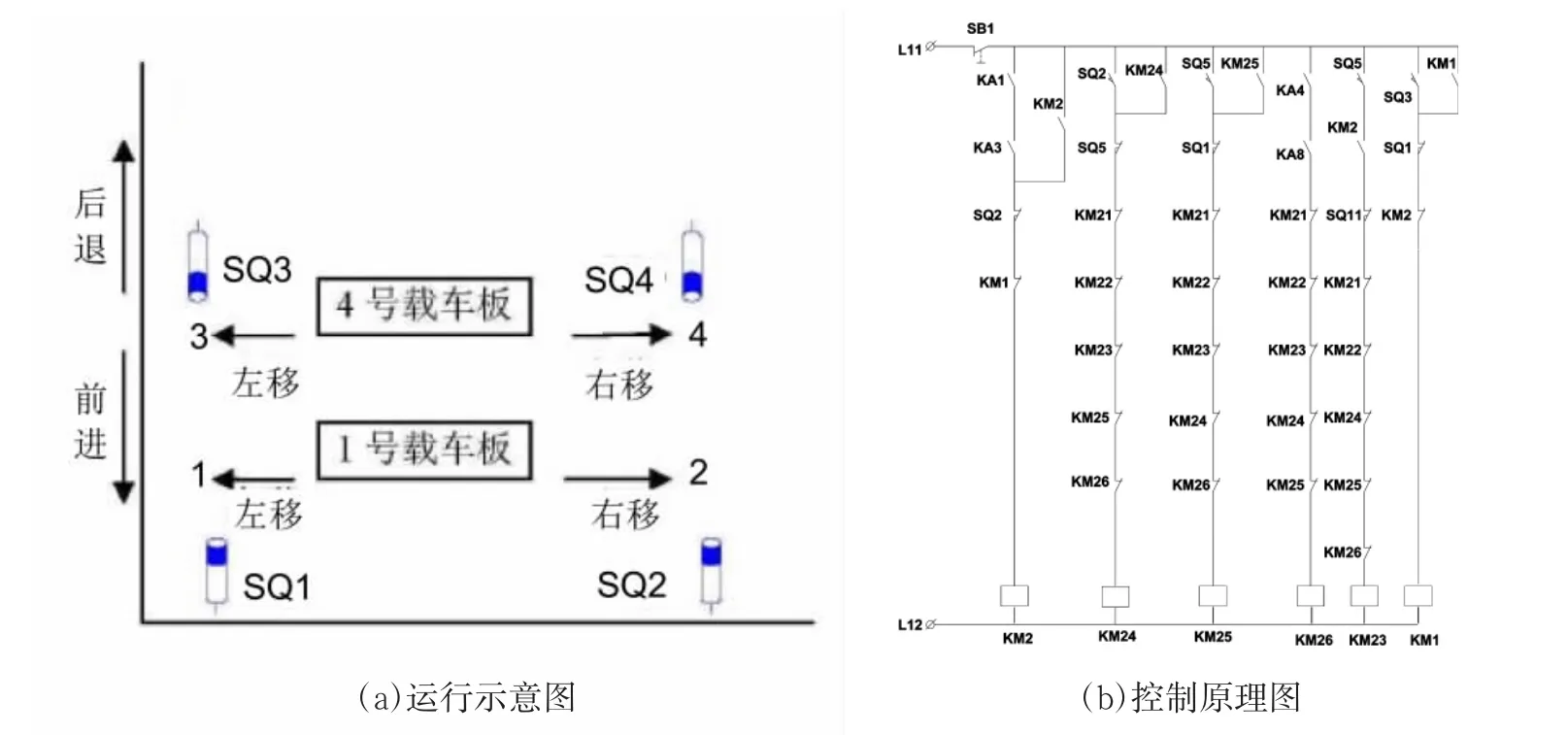
图5 4号载车板运行示意图、控制原理图
4号车位用3台电动机来控制载车板在不同方向的运动,共有交流接触器6个,其中KM1、KM2控制1号载车板的左右移动机,KM5、KM6控制4号载车板的左右移电动机,KM7、KM8控制4号载车板的前后移电动机.采用4个传感器检测载车板到位情况.静态时,4号载车板处于SQ3的位置.若要在4号车位停、取车,则要挡在4号前面的1号载车板移到右边,使4号能前移到1号的位置内进行停、取车,等处理完成后复位.
图5(b)为4号载车板的控制原理图,当KA1常开触点闭合.按下4号车位的按钮SB4,KA3线圈得电,KA32常开触点动合接通.KM2线圈得电并自锁,1号车位载车板右移的电机反转.将载车板移到空位处,SQ2动断触点断开,KM2线圈断电,载车板停止右移.同时SQ2动合触点接通常,KM7线圈接通电源,4号载车板前进至1号车位终点时,传感器SQ1动断触点断开,KM7线圈断电,载车板停止前进,进行停、取车.
当按下复位开关SB2时,KA2线圈得电,KA2常开触点接通;再按下4号车位的开关SB4,KA3线圈得电,KA3常开触点闭合,KM8线圈得电并自锁,传感器SQ3常闭触点断开,KM8线圈失电停止后退,4号载车板复位.同时SQ3的常开触点闭合,KM1线圈得电,1号左右移电机正转使载车板左移,左移至终点时,SQ1常闭触点断开,KM1线圈失电,载车板停止左移.
2.2.2 中间层控制系统
中间层共有4个停车位,其中7、10号与9、12号车位的载车板动行过程相似,下面以10号车位的载车板运行为例说明其控制电路工作原理.运行示意图见图6(a).
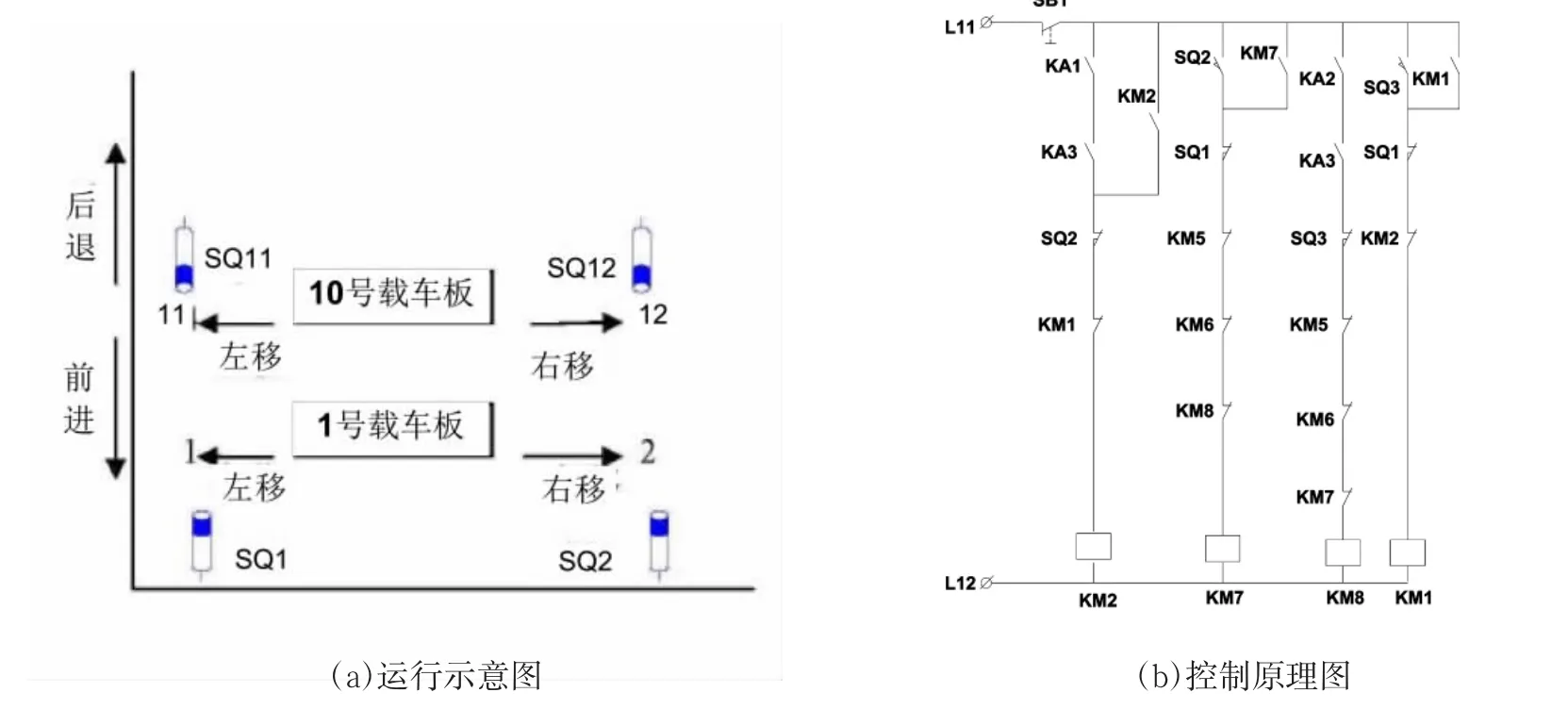
图6 10号载车板运行示意图、控制原理
10号载车板运动过程共需要3台交流异步电动机,分别用于控制载车板上、下移动,左、右移动和前、后移动.8个交流接触器和4个传感器,控制系统电路见图6(b).
10号车位停取车其工作原理为:当KA1常开触点闭合.按下10号车位的按钮SB10,KA3线圈得电,中间继电器KA3动合触点接通.KM2线圈得电并自锁,控制1号车位载车板运行的电机反转.当1号车位载车板向右移到空位处,传感器SQ2动断触点断开,KM2线圈断电,1号载车板停止右移.同时SQ2常开触点闭合,KM24线圈接通电源,控制10号载车板上下移动的电机反转,当载车板下降至底层位置时,传感器SQ5常闭触点断开,KM24线圈失电,载车板停止下移.此时传感器SQ5动合触点接通,KM25线圈得电,10号拖动载前后移动的电去动机正转,当移至1号车位时,传感器SQ1动断触点断开,停止前移,并进行停取车.
当按下复位开关SB8时,KA4线圈断电致使KA4动合触点接通.再按下10号车位的开关SB10,KA8线圈通电,致使KA8动断触点闭合,KM26线圈得电源并自锁,10号车位前后移电机反转,10号载车板后退,退至终点位置时传感器SQ3常闭触点断开,KM26线圈失电停止后退.同时传感器SQ5的常开触点闭合,KM23线圈得电并自锁,10号载车板上升并复位.同时SQ3的常开触点闭合,KM1线圈得电,1号左右移电机正转使载车板左移,左移至终点时,SQ1常闭触点断开,KM1线圈失电,载车板停止左移.
2.2.3 顶层控制系统
顶层共有6个停车位,其中9、12号和11、14号载车板运动相似,而10、13号车位只需下移到底层的空位就可进行停、取车操作.
3 系统软件设计
系统的软件包括两部分:一是用于监控整个停车场的上位机界面,二是用于编程的PLC可编程控制器.采用梯形图编程方式,包括主程序和各个子程序.由于程序较大,输入输出单元多,笔者只列出了一小部分初始化程序,梯形图中的Y0-Y4为交流接触器KM1-KM5在PLC程序中的输出线圈.部分调用子程序见图7(10号载车板的PLC程序).
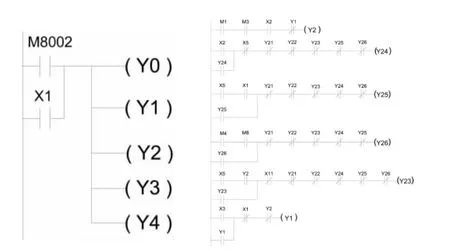
图7 初始化程序及调用子程序
在软件编程中,根据前面详述的停、取车过程,最重要是要考虑在停、取中过程中各个部件间动作的先后顺序及协调过程.这里主要在程序中的延时子程序中体现出来.在编写梯形图中,事先定义各个继电器、传感器等输入、输出的功能及编号,接着选各子程序模块完成相应功能的控制过程.
4 结论
停车难问题已成为城市道路拥堵的主要难题,如何更好的解决这一问题已成为当前城市规划的主要内容.立体车库的使用在国外已是普遍现象,在国内也越来越受到人们的青睐.本设计智能停车场的主控端采用三菱FX2N可编程控制器,实现立体停车库的智能管理,方便的实现了停、取车的操作.提高了停车场的管理效率.在不同的停车场管理中具有广泛的市场应用价值,对国家提倡的土地资源节约方面具有很好的推广作用.
[1]鲁武林.基于PLC的自动化立体停车库控制设计[D].南昌:南昌大学,2017.
[2]闫永志,包辛杰,任雪鸿.基于S7-300PLC的智能立体车库监控系统设计[J].机电一体化,2016,22(10):61-63.
[3]屈原.立体车库的电气安装智能控制系统设计与运行[J].山东工业技术,2016,9(13):151.
[4]衡蜓.基于PLC的智能立体车库控制系统设计[J].农业技术与装备,2016,22(2):29-30.
[5]彭兴会,李明辉.基于PLC的地下智能立体车库控制系统设计[J].现代国企研究,2015,5(14):204,206.
[6]周世强,邢长达.基于 PLC 的智能车库管理系统设计[J].科技视界,2014,4(27):120-121.
[7]李红萍,李艺鸿,贾秀杰,等.基于PPI网络的地下停车场监控系统设计[J].自动化与仪器仪表,2014,20(1):40-41,44.
[8]陈良顺.基于PLC的地下智能立体车库控制系统设计[J].闽西职业技术学院学报,2013,7(1):92-98.
[9]刘冠辰,王柏谊.货运智能停车场管理系统设计[J].物流技术,2017,5(2):75-77,113.
[10]丁锐.智能停车场车位检测和车牌识别系统的研究[D].武汉:武汉工程大学,2016.
