一种3T1R并联机构设计及运动学性能分析
2018-01-16顾开荣王传伟刘晓飞
朱 伟 顾开荣 王传伟 刘晓飞
常州大学机械工程学院,常州,213164
0 引言
三平移一转动(3T1R)并联机构在高速抓放、自动分拣、生产线装配等领域具有广泛的应用需求。根据动平台转动轴线的不同,3T1R并联机构可分为三种形式:3T1Rx、3T1Ry、3T1Rz,即动平台可实现三维平动和分别绕x、y、z轴的转动。
由于DELTA机器人的三组支链采用相同的R(SS)2结构[1],获得很好的应用效果,因此类似的平行四边形支链结构在3T1R并联机器人中得到广泛应用,这种机构具有高速和高加速度的操作性能。文献[2-5]先后发明了同属一类的由4条R(SS)2支链和双平台组成的3T1R并联机构(分别称为H4、I4、Par4和Heli4)。KIM等[6-7]采用RR(RR)2RR支链设计了两种全转动副3T1Rx、3T1Rz并联机构。汪满新等[8]采用4条R(UU)2支链设计了一种单平台3T1Rz机构。刘辛军等[9]将(SS)2支链改进为(SRRS)2,并发明了由4条R(SRRS)2R支链组成的3T1Rz并联机器人,即X4机构。
这类少自由度机构在运动过程中容易出现奇异位形,此时可能因失去刚度或失去部分自由度而变得不可控制,从而使机构的有效工作空间变小甚至不连续,在很大程度上影响了机构的运动性能[10]。在机构的适当位置添加冗余驱动支链,可以使机构避开奇异位形,同时可提高机构刚度,增大有效工作空间。
本文设计一种2R(SRS)2R+2R(SRS)2非对称3T1Ry型并联机构,运用方位特征理论[11]分析了机构自由度和拓扑结构,推导出机构的位置正反解方程,通过位置数值解对运动方程正确性进行验证。分析了机构的工作空间及奇异位形等运动性能指标,设计了一种新型冗余驱动方式,可有效消除部分正解奇异位形,且保持机构的可达工作空间不变。
1 机构拓扑结构分析
1.1 机构描述
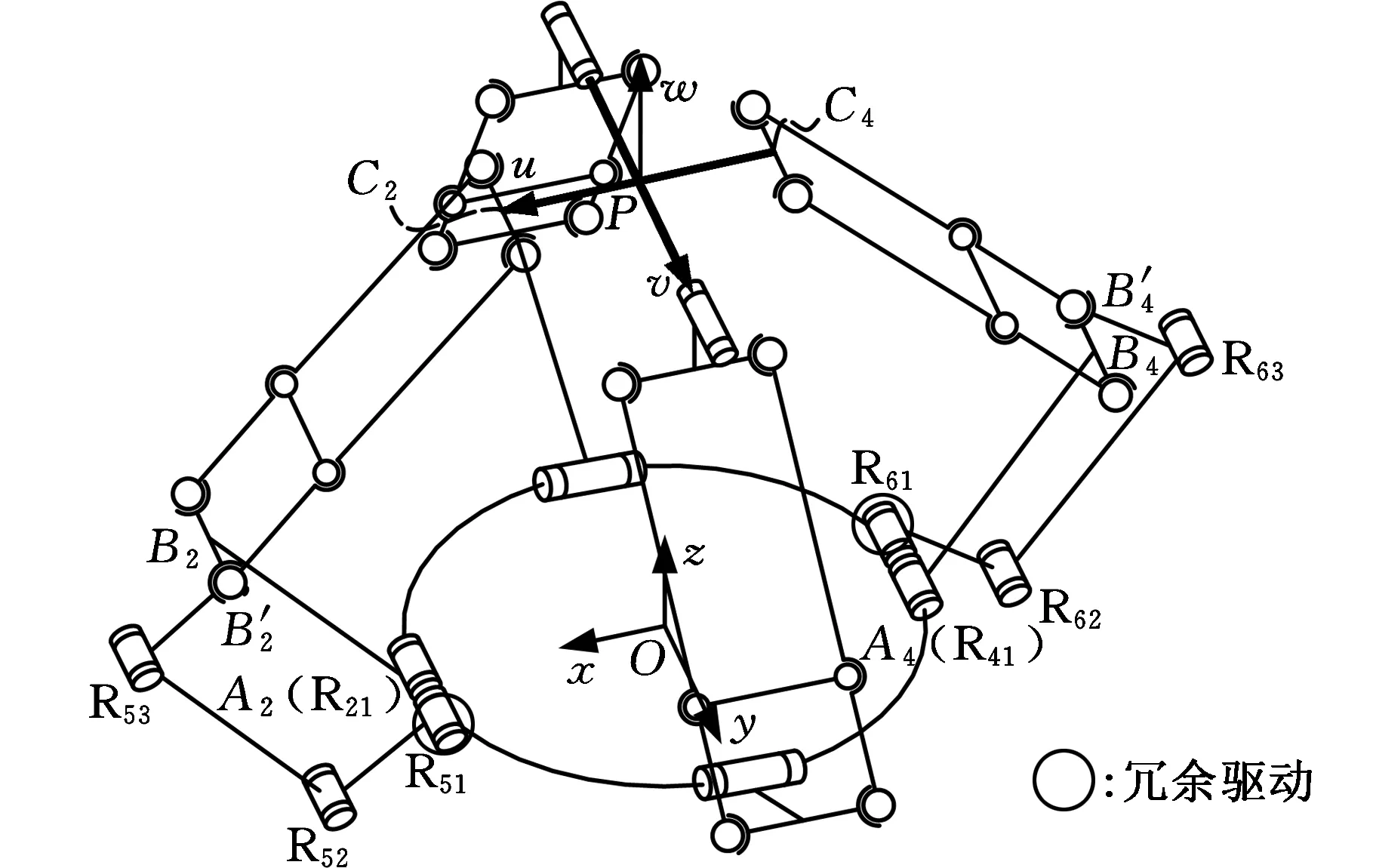
2R(SRS)2R+2R(SRS)2并联机构由动平台、静平台及4条分支组成,三维模型如图1所示。每条支链中均包含一条主动臂AiBi和一个(SRS)2平行四边形结构,主动臂一端通过转动副Ri1与定平台相连,另一端与平行四边形结构短边的中心固定连接,平行四边形中的转动副Ri2//Ri3(i=1,2,3,4),且轴线垂直于该平面。其中,第1、第3支链为平行的R(SRS)2R结构,竖直杆CiDi一端通过转动副Ri4(i=1,3)与动平台连接,另一端和平行四边形短边固定连接,且R11⊥R14,R14与R34同轴,R11//R31;第2、第4支链为平行的R(SRS)2结构,支链的平行四边形短边与动平台固定连接,R21//R41,结构原理如图2所示。
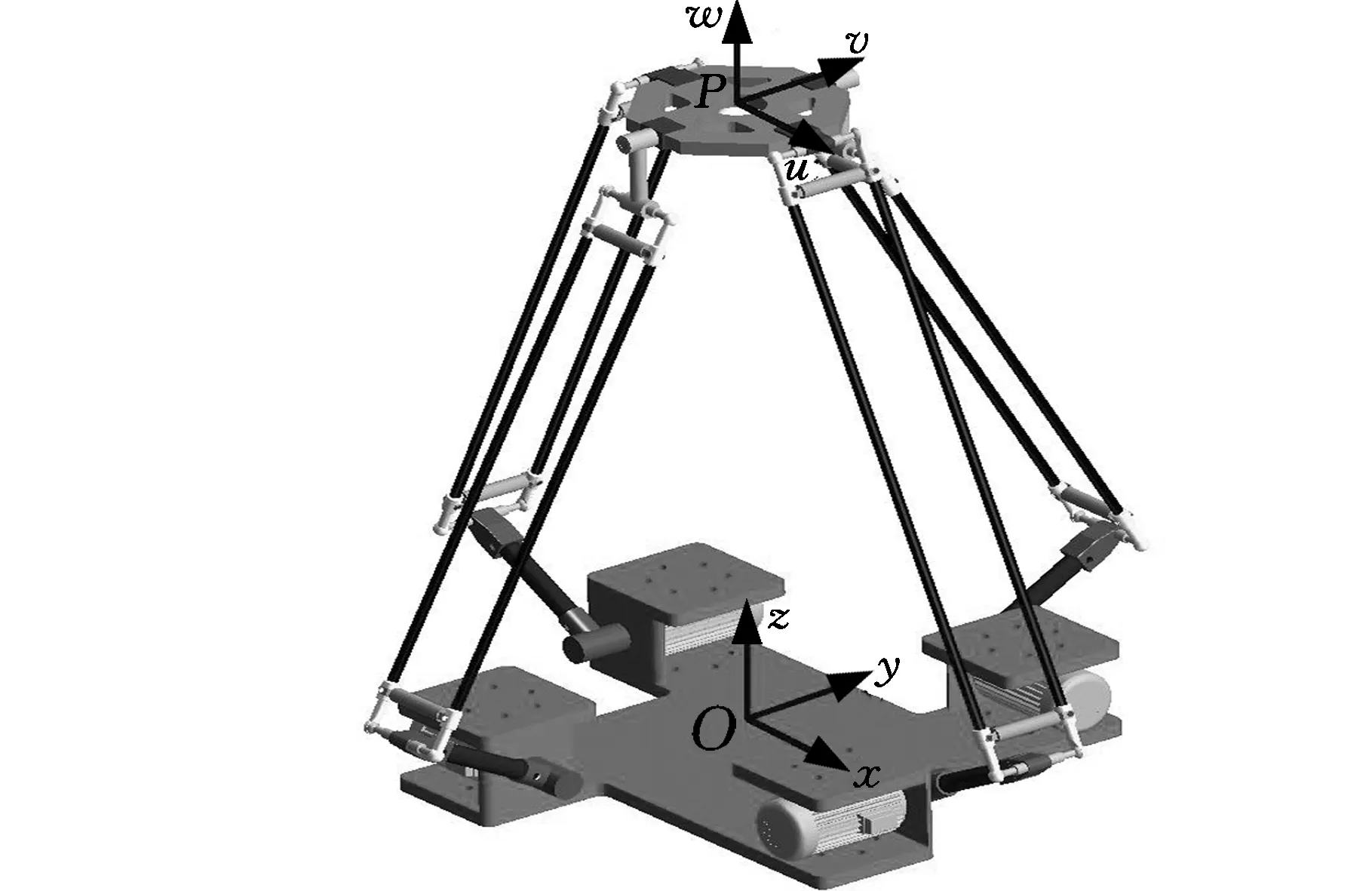
图1 机构三维模型Fig.1 3D model of the mechanism

图2 机构原理图Fig.2 Schematic diagram of mechanism
机构采用非完全对称结构,每条支链中与静平台相连的转动副Ri1中心Ai位于半径为r的圆周上,动平台为长和宽分别为2m、2n的矩形,4条支链与动平台的连接点Ci、Di位于动平台4条边的中点。在静平台中心上建立定坐标系Oxyz,x轴沿OA2方向,y轴沿OA3方向,z轴垂直于静平台竖直向上;在动平台的中心P点建立动坐标系Puvw,u轴沿PC2方向,v轴沿PD3方向,w轴垂直于动平台向上,如图2所示。
1.2 机构拓扑结构分析
根据文献[11]提出的机构有序单开链结构组成原理:自由度(DOF)为F的并联机构(PM)可看成由F个驱动副和V个有序单开链(SOC)依次连接而成。图2中,机构可看成是由第2、第4支链构成的第1独立回路(记为子并联机构Mpa(2-4))、第1独立回路和第1支链构成的第2独立回路(记为子并联机构Mpa(1-2-4))以及第2独立回路和第3支链构成的第3独立回路(记为并联机构Mpa)依次连接而成。根据方位特征原理,机构的方位特征集(POC)可表示为
(1)
式中,V为独立回路数,V=3;Mbj为第j条支链的POC集,j=1,2,3;t、r分别表示POC集的移动和转动。
根据机构自由度计算公式:
(2)
式中,ξLj为第j个独立回路的独立位移方程数;q为运动副数目。
可见,该机构为3T1Ry运动输出机构。机构耦合度为
(3)
式中,Δj为第j个单开链的约束度。
机构的结构分解路线可表示为
PM[F=4,V=3,k=2]=J[4]+SOC1(Δ1=2)+
SOC2(Δ2=-1)+SOC3(Δ3=-1)
(4)
SOC1:{-A2-B2-C2-C4-B4-A4-}
SOC2:{-A1-B1-C1-D1-}
SOC3:{-A3-B3-C3-D3-}
2 机构位置分析
2.1 位置反解
根据图2中建立的坐标系,设机构动平台中心P点在定坐标系Oxyz中的坐标P=(xP,yP,zP)T,绕y轴的姿态角为α,4条支链中驱动副的输入角为θi(i=1,2,3,4)。各杆长分别为:AiBi=l1,BiCi=l2(i=1,2,3,4),CiDi=h(i=1,3),DiP=m(i=1,3),CiP=n(i=2,4)。
点Ai、Bi在定坐标系Oxyz中的坐标为
动平台上各点在定坐标系Oxyz中的坐标为
(5)
R=rot(y,α)
式中,R为动坐标系Puvw相对与定坐标系Oxyz的旋转矩阵;mi为杆DiP的单位矢量;ni为杆CiP的单位矢量。
根据图2中矢量关系,可得封闭矢量方程
(6)
式中,ai为OAi的单位矢量;bi为杆AiBi的单位矢量;ci为杆BiCi的单位矢量;e为CiDi的单位矢量。
将各点坐标代入式(6),整理后可得如下形式:
Eicosθi+Fisinθi+Gi=0i=1,2,3,4
(7)
E1=2l1(yP-m+r)F1=-2l1(zP-h)
E2=-2l1(xP+ncosα-r)
F2=-2l1(zP-nsinα)

E3=-2l1(yP+m-r)F3=-2l1(zP-h)
E4=2l1(xP-ncosα+r)
F4=-2l1(zP+nsinα)
可求解出机构的反解方程
(8)
2.2 位置正解
根据上述拓扑结构分解顺序,采用序单开链法[12]求解机构的正解。
2.2.1单开链SOC1(Δ=2)

图3 虚拟变量位置示意图Fig.3 Diagram of dummy variables
易得C2点虚拟坐标为
(9)

(10)
解之得




2.2.2单开链SOC2(Δ=-1)
因为P为C2C4中点,D1P平行于y轴,C1D1平行于z轴,所以第2单开链中C1的坐标为
(11)
根据杆长B1C1=l2的长度约束条件,得到相容方程:

(12)
2.2.3单开链SOC3(Δ=-1)
因为P为C2C4中点,D3P平行于y轴,C3D3平行于z轴,所以第3单开链中C3的坐标为
(13)
根据杆长B3C3=l2的长度约束条件,得到相容方程:
(14)

2.3 位置正反解的数值验证
选取该机构的结构参数为:r=50 mm,l1=60 mm,l2=90 mm,h=10 mm,m=50 mm,n=20 mm。为了验证机构的正反解,将动平台位姿参数代入反解方程式(8),通过MATLAB编程算出机构输入参数,如表1所示。再将机构输入参数代入正解相容方程式(12)和式(14),得到动平台位姿参数,如表2所示。从表1和表2可看出,动平台的位置正反解完全匹配。

表1 位置反解Tab.1 Inverse position analysis
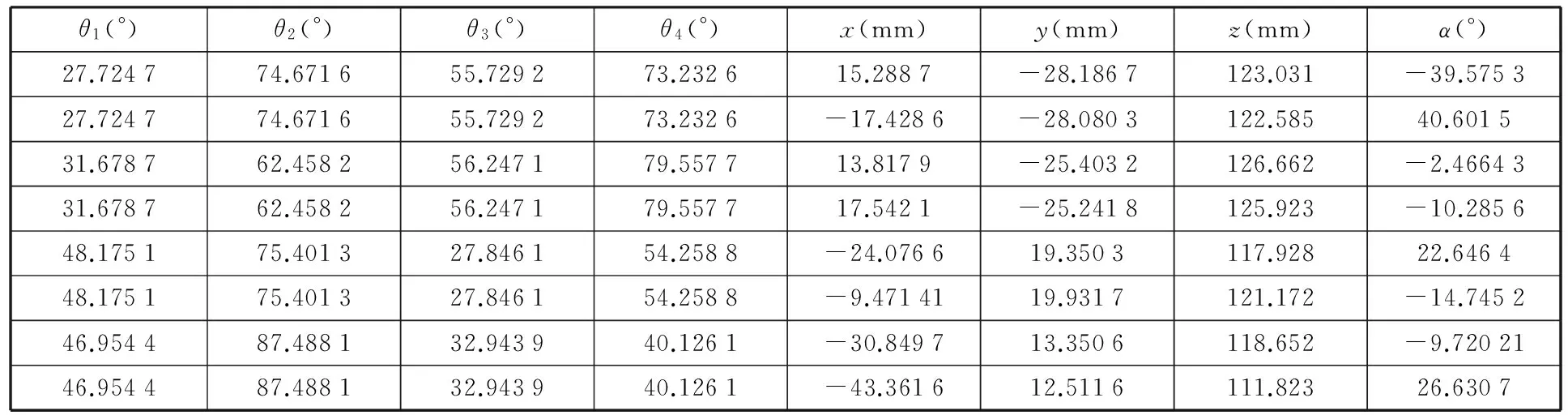
表2 位置正解Tab.2 Direct position analysis
3 机构运动性能分析
3.1 工作空间分析
本机构工作空间的主要约束条件包括杆长约束和运动副约束。设定4个驱动角θi(i=1,2,3,4)范围为-π~π。考虑到机构的有效工作空间,搜索高度设定为[20 mm,120 mm]。对于不同的工作运动要求,动平台处于不同姿态角时,机构的工作空间不同。图4所示为α分别为0°、30°、60°、90°、120°、150°定姿态时,机构的三维位移工作空间。可见,当α=0°时,可达工作空间范围最大,随着α增大,工作空间依次减小,α=150°时,可达工作空间最小。总体而言,机构在各姿态的可达工作空间连续性较好,当z≥60 mm时,机构工作空间几乎不出现空洞。在工作空间的下半部分,越往下,机构工作空间空洞越大,表示机构工作空间内部不可达区域增多,所以尽量避免机构在工作空间底部位置工作。
3.2 雅可比矩阵

Jpvp=Jqvq
(15)
(16)
(17)
N11=2(yP-m+r+l1cosθ1)l1sinθ1+
2(zP-h-l1sinθ1)l1cosθ1

(a)α=0° (b)α=30°

(c)α=60° (d)α=90°

(e)α=120° (f)α=150°图4 工作空间Fig.4 Workspace
3.3 奇异性分析
并联机构的奇异位形可通过上述雅可比矩阵进行分析,主要有逆解奇异、正解奇异和混合奇异三种类型。
3.3.1逆解奇异
逆解奇异发生条件为|Jq|=0,且|Jp|≠0。根据式(16)可知,若Jq对角线上任一元素为零,则|Jq|=0。
由N11=0,N22=0,N33=0,N44=0,可得
(18)
当输入参数满足上述任一方程时,|Jq|=0,机构发生逆解奇异。通常,这类奇异一般发生在机构到达工作空间边界位置或存在多组逆解时。如当杆AiBi和杆BiCi处于拉直共线或重叠共线时,表示机构到达极限位置。
3.3.2正解奇异
正解奇异发生条件为|Jp|=0,且|Jq|≠0。由式(17)可知,若M24=0且M44=0,则|Jq|=0。
由M24=0,M44=0可得

(19)
将求解出的α代入方程M24=0、M44=0,可得出机构正解奇异的位置。当从动杆BiCi与动平台平行或共面时,尽管驱动杆AiBi固定,动平台依然具有运动自由度,机构运动不确定。
3.3.3混合奇异
当|Jq|=0且|Jp|=0时,机构发生混合奇异,此时机构将失去自由度。
4 冗余驱动
为了避免或减轻机构奇异对机构运动性能的影响,可通过增加冗余驱动以消除全部或部分奇异位形。机构奇异的本质是表示机构输入输出关系的雅可比矩阵降秩[10],机构末端执行器的输出自由度发生变化。若增加冗余驱动后,能够分别使雅可比矩阵在原机构的奇异位置不降秩,即可解决机构的奇异问题。根据机构特点,本文设计两种冗余驱动方式。
4.1 SPS冗余支链
在静平台中心O点和动平台上v轴以外任意位置之间添加SPS支链,P副为驱动,结构原理及三维模型如图5所示。

(a)结构原理

(b)三维模型图5 SPS冗余驱动支链Fig.5 SPS additional active limb
增加冗余驱动后,机构的雅可比矩阵为
(20)
(21)


由于移动副固有的结构特性,尽管该冗余驱动方式会提高机构的刚度和承载能力,但其工作空间会大大减少。同时,驱动副位于支链中间,影响了机构的运动性能和灵活性。
4.2 RRR冗余支链

(a)结构原理

(b)三维模型图6 RRR冗余驱动支链Fig.6 RRR additional active limb
机构增加冗余驱动后,雅可比矩阵为
(22)

(23)
2M51=-sinθ52M52=02M53=-cosθ5
2M54=nsinαsinθ5+ncosαcosθ5
2M61=sinθ62M62=02M63=-cosθ6
2M64=nsinαsinθ6-ncosαcosθ6
2N52=l1sinθ2sinθ5-l1cosθ2cosθ5
2N55=-(r+l1cosθ2-xP-ncosα)cosθ5-
(zP-nsinα-l1sinθ2)sinθ5
2N64=l1sinθ4sinθ6-l1cosθ4cosθ6
2N66=-(xP-ncosα+r+l1cosθ4)cosθ6-
(zP+nsinα-l1sinθ4)sinθ6

当动平台姿态角为180°时,原机构的工作空间如图7a所示,图中深色部分为空间内部的奇异位置。增加RRR冗余支链后,机构定姿态工作空间如图7b所示,工作空间增大,且内部奇异得到消除,机构的运动性能更好,且这类支链的驱动源可固定安装在定平台上,有利于机构提高运动速度和加速度性能。

(a)原机构 (b)增加冗余驱动后图7 冗余驱动工作空间Fig.7 Workspace after redundant driving
5 结论
(1)设计一种新型3T1Ry运动并联机构,分析了机构的拓扑结构特性,该机构耦合度为2,耦合性较强,整体结构部分对称。
(2)采用序单开链法建立了机构的正解方程,并通过数值解验证了正反解方程的正确性。
(3)分析了机构的工作空间和奇异位形等运动性能,表明机构具有较大的工作空间,但存在的奇异位置导致工作空间内部不连续。
(4)为了减少机构的奇异位形,设计了两种冗余驱动方式。经分析表明,RRR冗余支链可在不影响机构工作空间的前提下有效消除部分奇异位形,且其驱动源安装在定平台上,便于机构在高速和高加速度场合推广应用。
[1] CLAVEL R. Delta a Fast Robot with Parallel Geometry[C]//Proceedings of 18th International Symposium on Industrial Robots. Lausanne: IFS Publications,1988:91-100.
[2] PIERROT F, COMPANY O. H4: a New Family of 4-DOF Parallel Robots[C]//Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Atlanta: IEEE,1999:508-513.
[3] KRUT S, COMPANY O, BENOIT M, et al. I4: a New Parallel Mechanism for SCARA Motions[C]// Proceedings of the IEEE International Conference on Robotics and Automation. IEEE,2003:1875-1880.
[4] NABAT V, COMPANY O, KRUT S, et al. Par4: Very High Speed Parallel Robot for Pick-and-place[C]// Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. New York: IEEE,2005:1202-1207.
[5] KRUT S, COMPANY O, NABAT V, et al. Heli4: a Parallel Robot for SCARA Motions with a Very Compact Traveling Plate and a Symmetrical Design[C]// Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing: IEEE,2006:1656-1661.
[6] KIM S M,KIM W K,YI B J. Kinematic Analysis and Optimal Design of a 3T1R Type Parallel Mechanism[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Kobe,2009:2199-2204.
[7] KIM S M,KIM W K,YI B J. Kinematic Analysis and Design of a New 3T1R 4-DOF Parallel Mechanism with Rotational Pitch Motion[C]//Proceedings of the IEEE International Conference on Intelligent Robots and Systems. St Louis,2009:5167-5172.
[8] 汪满新,黄田,王立,等. 一种三平一转四自由度并联机构:中国,201510786414.6[P].2015-11-16.
WANG Manxin,HUANG Tian,WANG Li,et al. Four Degree of Freedom Parallel Mechanism with Three Translations and Two Rotations: China,201510786414.6[P].2015-11-16.
[9] 刘辛军,谢富贵,王立平,等. 一种可实现SCARA运动的四自由度单动平台并联机构:中国,201210435375.1[P].2012-11-02.
LIU Xinjun, XIE Fugui, WANG LIping, et al. A 4-DOF Single Motion Platform Parallel Mechanism for SCARA Motions:China,201210435375.1[P].2012-11-02.
[10] 白志富,韩先国,陈五一.冗余驱动消除并联机构奇异研究[J].航空学报,2006,27(4):733-736.
BAI Zhifu,HAN Xianguo,CHEN Wuyi. Study on Elimination Singularities of Parallel Mechanism by Actuation Redundancy[J]. Acta Aeronauticaet Astronautica Sinica,2006,27(4):733-736.
[11] 杨廷力,刘安心,罗玉峰,等.机器人机构拓扑结构设计[M].北京: 科学出版社,2012.
YANG Tingli, LIU Anxin, LUO Yufeng, et al. Theory and Application of Robot Mechanism Topology [M].Beijing: Science Press,2012.
[12] 冯志友,张策,杨廷力.基于序单开链法的空间4自由度并联机构位置正解[J] . 机械工程学报,2006,42(7):35-38.
FENG Zhiyou,ZHANG Ce,YANG Tingli.Positional Solution of 4 Degree of Freedom Parallel Mechanism Based on the Ordered SOCS Method Space[J]. Chinese Journal of Mechanical Engineering,2006,42(7):35-38.
