RV减速器模态特性分析
2018-01-16杨玉虎
孟 聪 陈 川 杨玉虎
天津大学机械工程学院,天津,300350
0 引言
RV减速器具有传动比大、体积小、传动效率高、扭转刚度大等特点,已被广泛应用于工业机器人关节减速传动。工业机器人性能的不断提高,对关节减速器的动力性能提出了更高的要求。文献[1-3]利用集中参数法,建立了RV减速器扭转动力学模型,求解了RV减速器的固有频率,分析了针齿数、摆线针轮啮合刚度和曲柄轴弯曲刚度对固有频率的影响。上述文献模型计入的刚度因素较少,且只考虑了各构件的扭转自由度。文献[4-6]考虑了曲柄轴沿啮合线方向的平移自由度,且计入了轴承刚度和曲柄轴弯曲刚度,建立了RV减速器动力学模型,求解了系统的各阶固有频率和振型。文献[7]在模型中考虑了曲柄轴和摆线轮公转运动的切向平移自由度,进行了固有频率灵敏度分析。文献[8-10]考虑了各构件的平移自由度,建立了RV减速器的平移-扭转动力学模型,求解了减速器各阶固有频率。文献[11]在三维参数化模型的基础上建立了2K-V型两级传动的动力学模型,并进行了动态特性优化研究。文献[12]建立了关于RV减速器非线性动力学模型,分析了其非线性动力学特征。文献[13-16]利用仿真软件对RV减速器进行了动力学分析。
以上文献均未考虑针齿圈刚度对RV减速器固有特性的影响,由于RV减速器大传动比使得针齿圈所受的作用力非常大,因此针齿圈刚度对减速器的动力学性能有重要影响。另外,RV减速器作为一种二级行星轮系,上述文献对RV减速器的振动模式未作系统的分析与归纳。
由此,本文建立考虑针齿圈刚度的RV减速器动力学模型,研究各刚度参数对固有频率的影响,以期为减速器的参数设计提供参考。
1 结构与传动原理
RV减速器是由渐开线与摆线齿轮组成的二级封闭式行星轮系,如图1所示。高速级为由中心轮1、径向均匀分布的3个行星轮2及系杆7组成的K-H型差动轮系,主动的中心轮与输入轴相连,如果中心轮1顺时针方向旋转,它将带动三个呈120°分布的行星轮2逆时针方向自转。低速级轮系为由径向均匀分布的3个曲柄轴3、2个对称布置的摆线轮4与若干针齿5以及输出盘6组成的K-H-V型行星轮系,曲柄轴一端与行星轮固连,另一端与输出盘上的销孔组成转动副,而其中部与摆线轮构成转动副。行星轮带动曲柄轴转动,通过曲柄轴将行星轮的自转传递给摆线轮使其实现公转,而摆线轮又通过输出盘将其自转反馈给系杆,作为差动轮系的输入运动,该轮系中系杆7与输出盘6固连为同一构件。
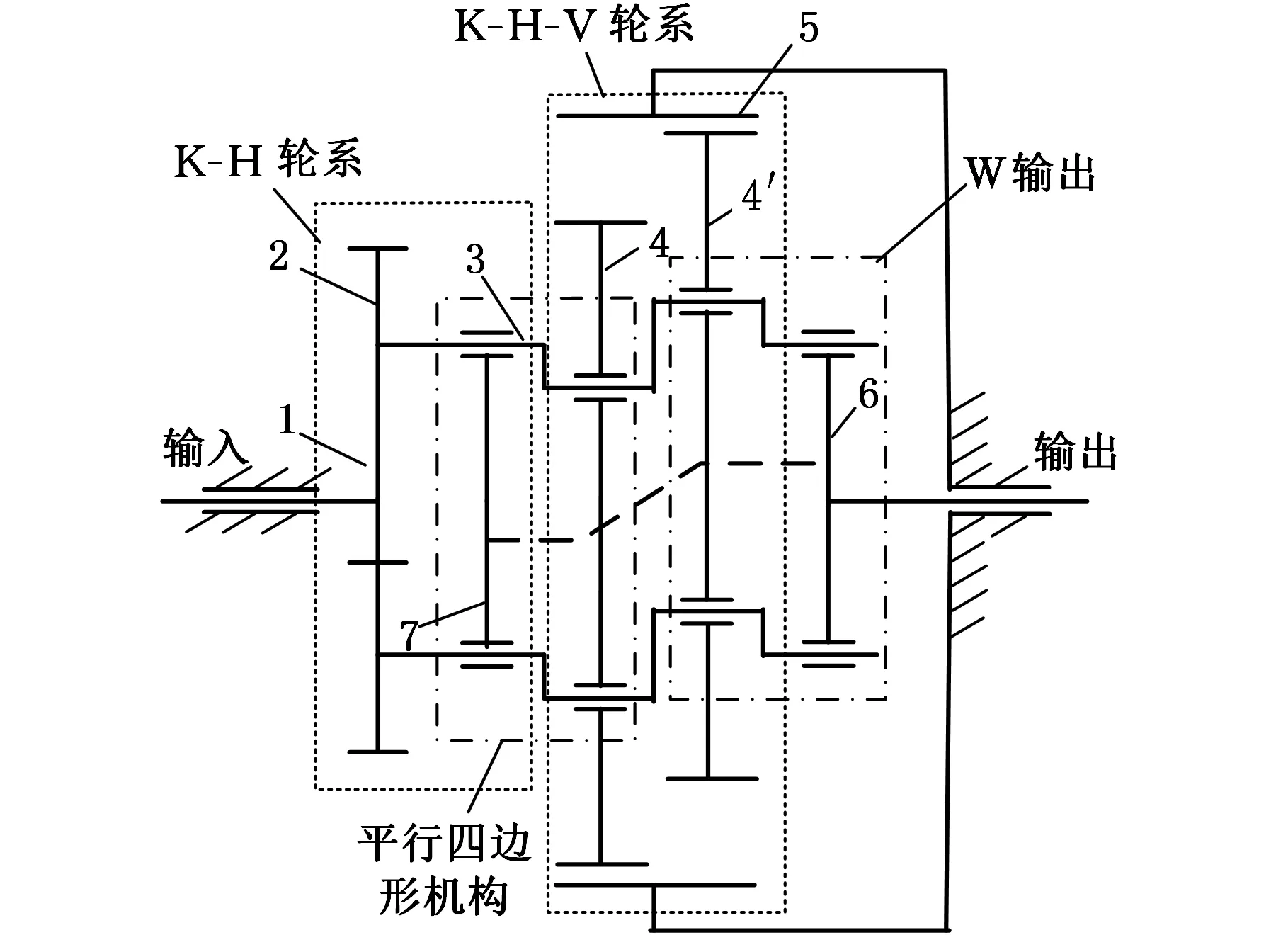
(a)机构简图

(b)三维模型1.太阳轮 2.行星轮 3.曲柄轴 4.摆线轮 5.针轮 6.输出盘 7.系杆 8.转臂轴承 9.支撑轴承图1 RV减速器示意图Fig.1 Schematic diagram of RV reducer
2 考虑针齿圈弹性的分析模型
2.1 动力学模型
采用集中参数法建立RV减速器的平移-扭转耦合动力学模型,如图2所示。图2中,下标s、o、r、p、H、c分别表示太阳轮、输出盘、针齿圈、行星轮、曲柄轴和摆线轮;下标t表示沿构件的周向;kj、kjt(j=s,o,…,c)分别为第j个构件的径向支承刚度和回转支承刚度,ψn(n=1,2,3)为第n个行星轮与水平方向的夹角,θj(j=s,o,…,c)为相应构件的扭转角位移;ksn、krj分别为第n个行星轮与太阳轮以及第j个摆线轮与针齿圈的啮合刚度,各行星轮、摆线轮沿中心轮周向均匀分布,具有相同的物理和几何参数。图2中每个构件均有三个自由度:一个绕自身轴线的扭转(取逆时针方向为正)和两个沿与轴线垂直的方向的平移自由度。

(a)高速级

(b)低速级图2 RV减速器动力学模型Fig.2 Dynamic model of RV reducer
为了便于研究运动特性,本文建立了固接在输出盘(行星架)上的参考坐标系oxyz。如图2所示,该坐标系以输出盘几何中心的理论位置为坐标原点,x的正方向由原点指向第一个曲柄轴轴孔的理想几何中心,y和z的正方向由右手定则确定。在oxyz空间中描述各运动构件状态的坐标:太阳轮、针齿圈和行星架的径向坐标分别为xi和yi(i=s,r,o);摆线轮径向坐标为xcj和ycj(j=1,2);行星轮的径向坐标为xpn和ypn(n=1,2,3),xpn的方向由太阳轮理想几何中心指向行星轮n的理想几何中心;曲柄轴的径向坐标为xHn和yHn(n=1,2,3),方向与相应的行星轮一致。太阳轮、针齿圈和行星架绕其自身轴线的回转角为θi(i=s,r,o);行星轮与曲柄轴绕其自身轴线的回转角分别为θpn和θHn(n=1,2,3);摆线轮绕自身轴线的回转角为θcj(j=1,2)。上述各回转角均以逆时针方向为正。
2.2 运动微分方程
减速器是典型的离散振动系统,建立其动力学模型的简便有效方法是集中参数法。以针轮为例,根据牛顿第二定律和动量矩定理,建立运动微分方程:
(1)

与针轮同理,可建立其他构件的运动微分方程,整理得到整机运动微分方程的矩阵形式:
(2)
式中,U为广义坐标;M、Kb、Km分别为质量矩阵、支承刚度矩阵、啮合刚度矩阵;F为外激励力向量。
与式(2)相对应的特征值问题为
(Kb+Km-ω2M)φ=0
(3)
ω=[ωi]
φ=[usuourup1up2up3uH1uH2uH3uc1uc2]T
式中,ωi(i=1,2,…,N)为系统的固有频率;φ为相应的振型。
3 固有特性分析
某型RV减速器的主要参数如表1所示,采用上述平移-扭转耦合动力学模型,求得该RV减速器系统的各阶固有频率及其对应的振动模式,如表2所示。为了便于分析针齿圈刚度对减速器固有特性的影响规律,表2同时给出了未计入针齿圈刚度时系统的固有频率。
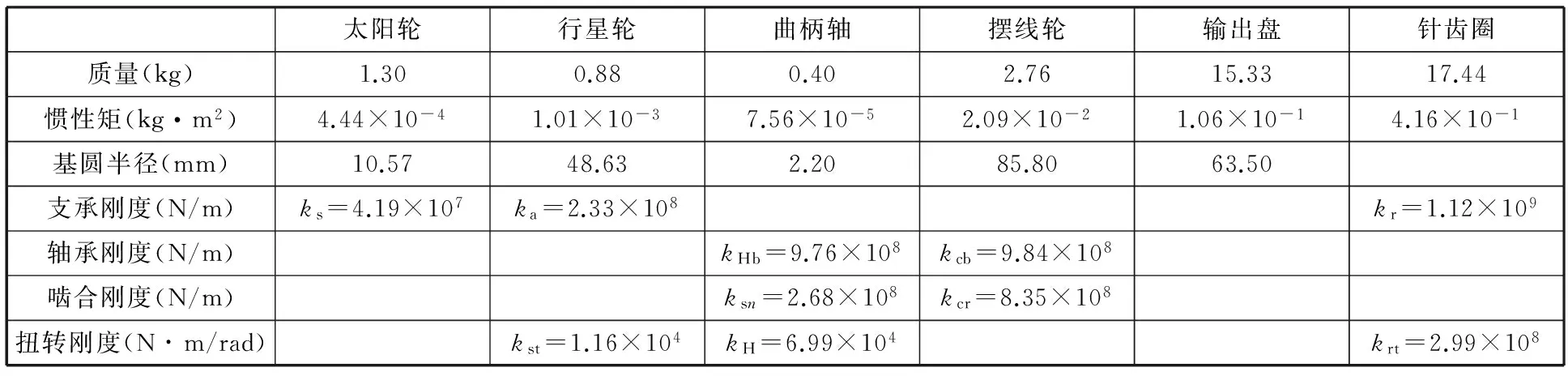
表1 RV减速器基本参数Tab.1 Basic parameters of some type RV reducer

表2 减速器固有频率Tab.2 Natural frequency of RV reducer
分析表2可知,考虑针齿圈弹性后,RV减速器的各阶固有频率均有所降低,其中低阶固有频率变化更为显著。由此,增加针齿圈的刚度有助于降低系统的低阶固有频率。
通过分析前4阶固有频率对应的振型,按照中心构件(太阳轮、行星架和针齿圈)的振动形式,可将RV减速器振动模式分为两种。中心构件扭转振动模式:此时,中心构件只有扭转振动,横向振动几乎没有。中心构件平移振动模式:中心构件只有平移振动,扭转振动不会被激起。
在中心构件的扭转振动模式中,两摆线轮的振动模态呈现:扭转振动相同,平移振动相反。在中心构件的平移振动模式中,两摆线轮的振动模态呈现:平移振动相同,扭转振动相反。两种振动模式下,各构件的运动特性如图3所示。其中,虚线圆及其上十字轴为构件初始位置,实线圆及其上十字轴为构件振动情况,黑色实心点为构件的回转中心。
4 影响因素分析

(a)中心构件扭转振动模式

(b)中心构件平移振动模式图3 中心构件振动模式Fig.3 Vibration mode of central component
不同的工程应用场合,针齿圈的固定方式不同,特殊应用场合下针齿圈也会充当减速器的输出构件,故针齿圈的支承刚度变化会较大,此外,由于RV减速器的传动比较大,使得支承轴承和转臂轴承所受动载荷较大,容易因疲劳磨损等原因造成轴承刚度的减小,从而影响其固有特性[7]。在求解减速器固有特性的基础上,为揭示刚度参数对减速器固有特性的影响,本节通过数值仿真分析固有频率随针齿圈刚度和轴承刚度的变化规律,从振动模式角度进一步分析固有特性轨迹突变现象对动力学特性的影响。
4.1 齿圈支承刚度
以表1所示参数为基准,改变针齿圈周向支承刚度krt和径向支承刚度kr,计算得到固有频率随krt与kr变化的曲线,如图4所示。
首先,从总体上看,固有频率随针齿圈刚度的变化存在模态相交和模态跃迁现象,图4中的模态1、2、4为中心构件平移振动模式,其不受针齿圈的周向支承刚度的影响;模态3为中心构件扭转振动模式,其不受针齿圈径向支承刚度的影响。
其次,分析图4a可知,随着针齿圈周向支承刚度的不断增大,模态3与模态4对应的固有频率曲线在krt=3.4×106N·m/rad(图4a中点A处)附近相交。而分析图4b可知,随着针齿圈径向支承刚度的不断增大,模态1和模态2对应的固有频率曲线在kr=1.1×108N/m(图4b中点B)附近发生了跃迁,模态1和模态4对应的固有频率曲线在kr=4.0×108N/m(图4b中点C)附近发生了跃迁,模态3对应的曲线与模态1、4对应的曲线在kr=1.6×108N/m(图4b中点D)和kr=4.8×108N/m(图4b中点E)附近发生了相交。

(a)针齿圈周向支承刚度
(b)针齿圈径向支承刚度图4 固有频率随针齿圈支承刚度变化曲线Fig.4 Curves of natural frequency with ring gear stiffness
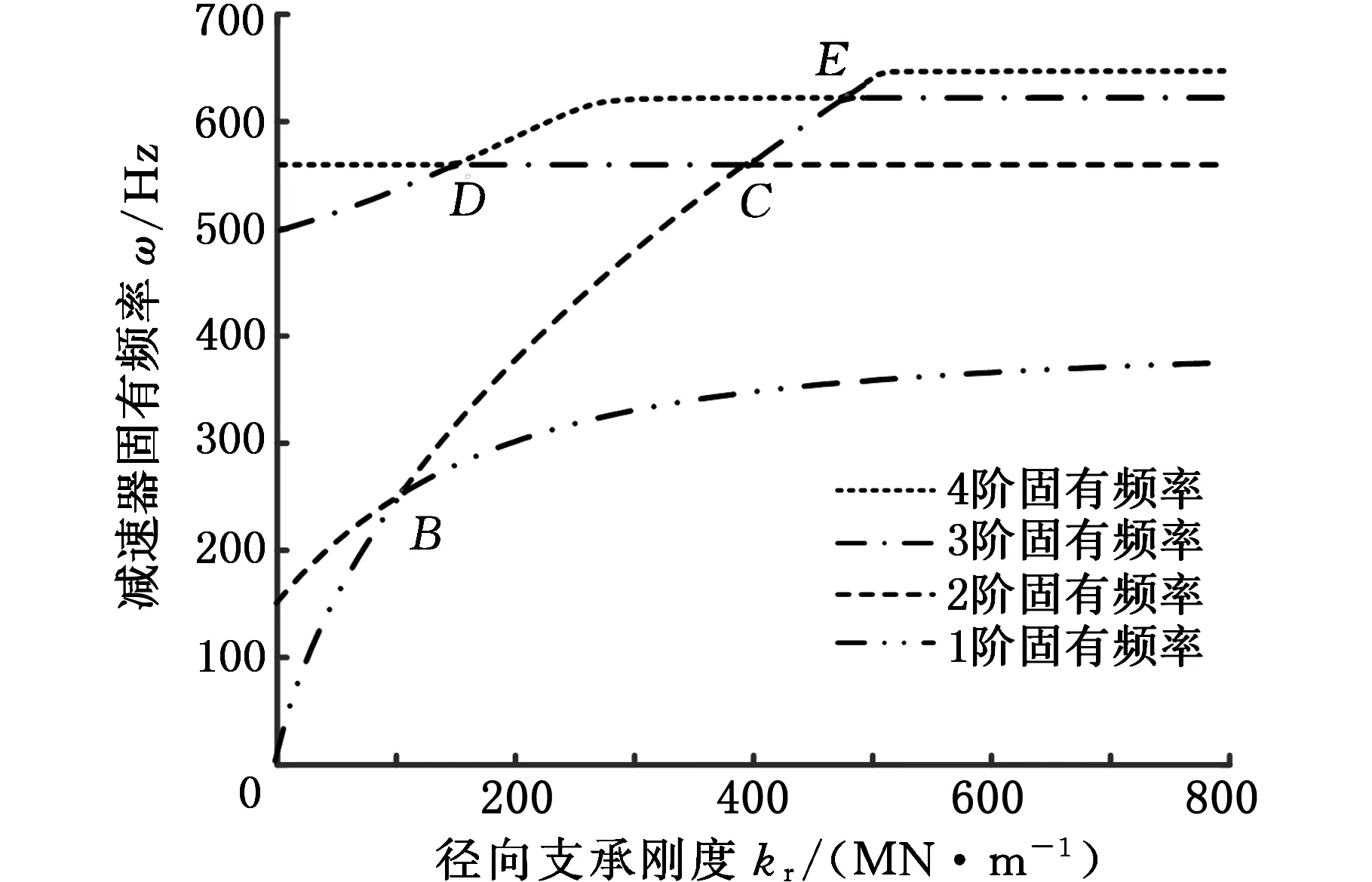
为了分析轴承刚度减小情况下针齿圈刚度对减速器模态特性的影响规律,保持其他参数不变,分别将转臂轴承刚度kcb和支承轴承刚度kHb取与表1中所对应的数据低一个数量级,计算得到系统固有频率随减速器针齿圈的径向支承刚度kr变化的曲线,如图5所示。
分析图5a可知,当针齿圈径向刚度取较大值时,存在一个模态不清晰点kr=4.0×108N/m(图5a中点C、D、E)和一个模态跃迁点kr=8.0×107N/m(图5a中点B)。
分析图5b可知,存在两个模态跃迁点分别为kr=1.0×108N/m(图5b中点B)、kr=3.9×108N/m(图5b中点C),模态相交点kr=4.6×108N/m(图5b中点E),kr=2.5×108N/m(图5b中点D)。
对比图4和图5可以看出,当轴承刚度较小时,针齿圈刚度对低阶固有频率影响更为显著,模态相交与模态跃迁现象更容易发生。

(a)轴承刚度不减小

(b)轴承刚度减小图5 固有频率随针齿圈径向支承刚度变化曲线Fig.5 Curves of natural frequency with ring gear radial stiffness
4.2 轴承刚度
为了揭示轴承刚度对减速器系统低阶固有频率的影响规律,通过数值仿真,分别得到系统的前4阶固有频率随转臂和支承轴承刚度的变化曲线,如图6所示。
由图6a可知,随着转臂轴承刚度的增大,RV减速器的固有频率呈增大趋势,其中,第3、第4阶固有频率增速较快,而第1、第2阶固有频率增速较缓,并且第1、第2阶固有频率对应的曲线在kcb=2.0×106N/m处发生模态跃迁现象。由图6b可知,随着RV减速器支承轴承刚度的增大,除了第3、第4阶固有频率对应的模态在kHb=2.7×107N/m处相交外,固有频率的变化趋势与图6a基本相同。

(a)转臂轴承刚度

(b)支承轴承刚度图6 固有频率随轴承刚度的变化曲线Fig.6 Curves of natural frequency with bearing stiffness
模态跃迁从本质上是指由系统振动特征方程求解特征值时,因刚度矩阵或质量矩阵发生小参数的改变,各阶模态特征值的排序发生变化[17]。由上述分析可知,在轴承刚度或针齿圈刚度发生变化时,模态相交、跃迁位置附近,参数的很小变动量会引起系统振动模式的剧烈变化,使传动特性剧烈变化,故在动态设计和传动特性研究中,不仅要避开啮频及其倍频引起的共振区,还应注意模态跃迁及相交导致的模态突变现象对系统传动特性的影响。
5 结论
(1) 考虑针齿圈弹性后,减速器的各阶固有频率均有所降低,增大针齿圈的刚度有助于降低系统的低阶固有频率。针齿圈刚度对系统的低阶固有频率影响显著,对高阶固有频率影响较小。
(2) 针齿圈径向支承刚度不影响中心构件扭转振动模式,针齿圈周向支承刚度不影响中心构件平移振动模式,且当轴承刚度较小时,针齿圈对固有频率影响更为显著。
[1] 刘继岩, 孙涛, 戚厚军. RV减速器的动力学模型与固有频率研究[J]. 中国机械工程,1999,10(4):381-386.
LIU Jiyan, SUN Tao, QI Houjun. Research on Natural Frequency and Dynamic Model of RV Reducer[J]. China Mechanical Engineering,1999,10(4):381-386.
[2] 张大卫, 王刚, 黄田,等. RV减速机动力学建模与结构参数分析[J] .机械工程学报,2001,37(1):69-74.
ZHANG Dawei, WANG Gang, HUANG Tian, et al. Dynamic Formulation of RV Reducer and Analysis of Structural Parameters[J]. Chinese Journal of Mechanical Engineering,2001,37(1):69-74.
[3] 戚厚军, 孙涛, 刘继岩,等. 2K-V型摆线针轮减速器传动系统的动态特性分析[J].机械传动,2004,28(2):13-15.
QI Houjun, SUN Tao, LIU Jiyan, et al. Dynamic Characteristic Analysis of 2K-V Planetary Gears Train with Cycloid Gears[J]. Journal of Mechanical Transmission,2004,28(2):13-15.
[4] 肖君君. RV减速器的动态特性理论分析[D]. 大连: 大连交通大学, 2008.
XIAO Junjun. Theoretical Analysis on Dynamic Characteristic of RV Reducer[D]. Dalian: Dalian Jiaotong University,2008.
[5] ZHANG Yinghui, HE Weidong, XIAO Junjun. Dynamical Model of RV Reducer and Key Influence of Stiffness to the Nature Character[C]// 2010 Third International Conference on Information and Computing (ICIC). Tangshan: IEEE,2010:192-195.
[6] ZHANG Yinghui, XIAO Junjun,HE Weidong. Dynamical Formulation and Analysis of RV Reducer[C]// International Conference on Engineering Computation,2009 ICEC’09. Hongkong: IEEE,2009:201-204.
[7] 刘柏希, 王文军, 聂松辉. RV 减速器扭转振动的固有特性及灵敏度分析[J]. 中国机械工程,2016,27(3):323-327.
LIU Boxi, WANG Wenjun, NIE Songhui. Analysis of Natural Characteristics and Sensitivity for Torsional Vibration of RV Reducer[J]. China Mechanical Engineering,2016,27(3):323-327.
[8] 严细海. 2K-V型减速机的动力学特性研究[D]. 天津:天津大学, 2003.
YAN Xihai. A Study on Dynamic Characteristics of 2K-V Gear Reducer[D]. Tianjin: Tianjin University,2003.
[9] 严细海, 张策, 李充宁. RV减速机的扭转振动的固有频率及其主要影响因素[J].机械科学与技术,2004,23(8):991-994.
YAN Xihai, ZHANG Ce, LI Chongning. Natural Frequency of Torsional Vibration of Rotary Vector Reducer and Its Influencing Factors [J].Mechanical Science and Technology,2004,23(8):991-994.
[10] 刘长坤, 李充宁, 杨保占, 等. 2K-V 型减速机的动力学建模与实验研究[J]. 天津职业技术师范大学学报,2014,24(2):12-15.
LIU Changkun, LI Chongning, YANG Baozhan, et al. Research on Dynamic Modeling and Experiment of 2K-V Reducer[J]. Journal of Tianjin University of Technology and Education,2014,24(2):12-15.
[11] WEI W, RENPING S. Three-Dimensional Parametric Modeling and Dynamic Optimization of 2K-V Type Transmission for Robot Joint[J]. Computer Measurement & Control,2013,3:52.
[12] SHAN L, HE W.Study on Nonlinear Dynamics of RV Transmission System Used in Robot Joints[M]//Recent Advances in Mechanism Design for Robotics. Switzerland: Springer International Publishing,2015:317-324.
[13] HSIEH C F. Dynamics Analysis of Cycloidal Speed Reducers with Pinwheel and Nonpinwheel Designs[J]. Journal of Mechanical Design,2014,136(9):091008.
[14] THUBE S V, BOBAK T R. Dynamic Analysis of a Cycloidal Gearbox Using Finite Element Method[J]. AGMA Technical Paper,2012:1-13.
[15] 李充宁, 陈晓敏. 2K-V型摆线针轮减速机的动力学仿真研究[J]. 机械传动,2009,33(2):74-77.
LI Chongning, CHEN Xiaomin. Study on Dynamics Simulation of 2K-V Cycloid-pin-annulus Reducer[J]. Journal of Mechanical Transmission,2009,33(2):74-77.
[16] 张春亮. 2K-V型减速机的虚拟样机仿真[D]. 天津: 天津工程师范学院,2008.
ZHANG Chunliang. Study on Simulation of Virtual Prototyping of 2K-V Reducer[D]. Tianjin: Tianjin University,2008.
[17] 于岩磊. 风作用下大跨斜拉网格结构参数振动及其模态跃迁研究[D]. 哈尔滨:哈尔滨工业大学,2010.
YU Yanlei. Study on Parametric Vibration and Mode Jumping of Long-span Cable-Stayed Spatial grid Structure under Wind Load[D]. Harbin: Harbin Institute of Technology,2010.
