格鲁吉亚奇尔克伊水电站地震监测系统的应用
2018-01-04G.N.
[] G.N.
格鲁吉亚奇尔克伊水电站地震监测系统的应用
[俄罗斯] G.N.安东诺夫等
为更好地掌握格鲁吉亚奇尔克伊水电站周边地区及坝址区域的地震风险,分别对电站地震安全监测网络系统采用的硬件、监测方法和技术限制进行了论述。同时,研究人员比较了试验设备现场观察到的和远程传感器获得的数据,并通过数据分析来实现水力学危险现象的早期检测及水轮机震动的远程监控。
水电站地震监测;远程监控;水轮机震动;俄罗斯
奇尔克伊(Chirkey)水电站位于格鲁吉亚北高加索苏拉克(Sulak)河上。电站大坝为混凝土拱坝,坝高232.5 m,坝长338 m。主厂房位于大坝旁,共安装4台混流式水轮发电机组。由于断层构造及地壳运动活跃,导致该地区地震活动强烈。
1 网络监测
1.1 网络建设原则和监测要求
为防止事故发生,水电站通常配备独立的监测系统,以便对水库地震、大坝结构和水轮震动进行监测,这在许多国家(ANSI / ASA 标准,1990年)属强制性标准。这是模拟数据采集和处理器不能充分利用传感器潜能的历史原因。因此,在这种情况下,只能选择低精度传感器并人为地将地震震动场划分为频带,每个传感器负责监测几种类型的震动,包括地震、大坝震动、水轮机及其部件的震动。
通过详细检查每一组监测要求,可以确定哪些指标限制是具有实质性的,哪些指标限制是由硬件局限导致的(见表1)。表1中前两种类型的监测系统可以组合成单个网络,用于监测水轮机震动。
1.2 电站监测方案
地震仪沿着大坝的两个内部廊道、坝内部分坝缝处、主厂房和7 km外的杜布基(Dubki)地震台(DBC,俄罗斯地球物理调查)布置。数据采集中心位于坝脊附近,包括一部可实现与执行时间同步的GPS。监测网络中所有传感器之间的内部联系,以及与杜布基地震台之间的通信均采用光纤电缆。该监测系统于2012年投入使用,至今已运行4 a,未出现任何故障,因此决定扩大监测网络。
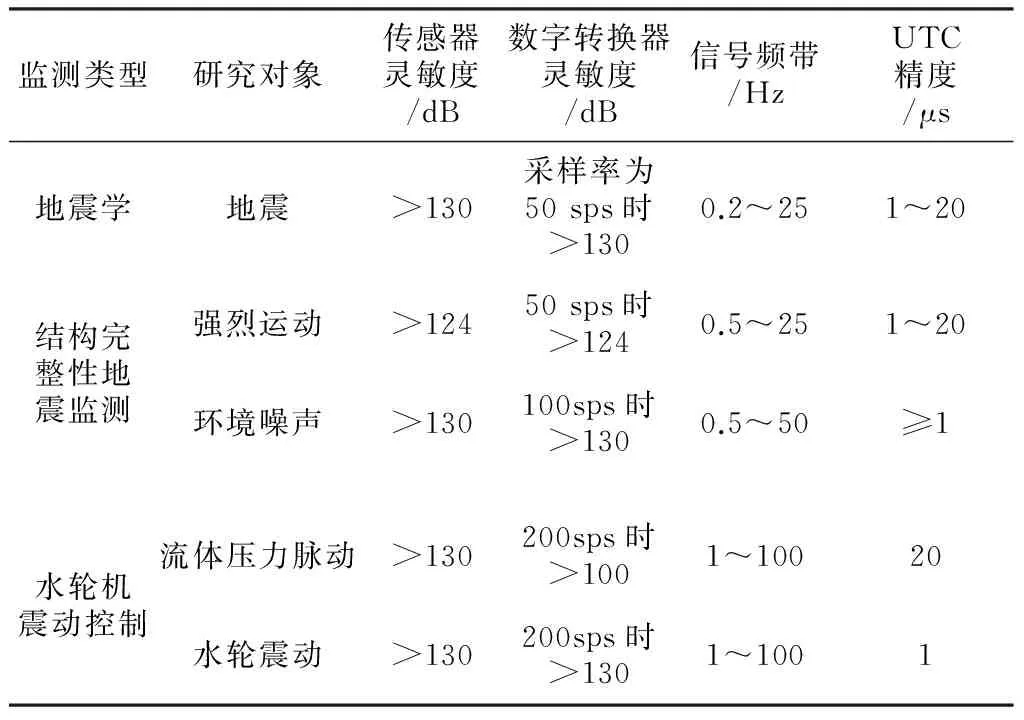
表1 水电站地震监测网络的主要要求
2 压力脉动观测
2016年,奇尔克伊水电站的观测网络主要用于监测大坝的自振频率、地震,及其对大坝的影响和响应。所有操作均基于传统方法进行,新监测系统的重要功能之一是通过在远程的地震观测点来检测水轮机的脉动异常。目前已在大量文献中刊出专门致力于研究异常脉动和汽蚀现象的内容,研究中大多采用计算机模拟描述不同阶段的详细运行过程。其中,水压和电力负载的运行参数受到特别关注。通过比较模拟值与经验观测值,得出模型结果与结论。阿别列夫(Abelev)等学者确定了水压与水轮机功率导致危险事件的具体比率。在此基础上,压力-功率图被分成水轮机可以或不能运行的若干区间。
研究中确定了监测震动的标准,可以指示有害汽蚀风险是否不断增加。尤其当压力和功率值未知且汽蚀过程开始时,水轮机监测的实践价值就得以体现。 有学者在2014~2015年探讨并初步解决了该问题。然而,其提供的数据是通过直接放置在水轮机上的传感器获得,并未给出有关远程测点的信息。
2.1 水轮机运行检测
在对奇尔克伊水电站进行现场分析之前,俄罗斯能源结构研究所(JSC Silovye Mashiny)开展了混流式水轮机的研究,试验的目的之一是识别汽蚀脉动特征,以确认实现远程监测这些事件并确定出传感器的最佳参数。试验设备包括三轴加速度计Guralp CMG-5T(模拟)和CMG-5TDE(数字)、模拟旋转速度计METR-03、数据记录器ADAS3(与奇尔克伊水电站使用的相同)和GSR-24(GeoSIG有限公司)。
试验将地震记录与IVP-05-0.8 / 200振动位移传感器的参考信号进行了比较。在试验前,将所有传感器放置在一块平板上,这样不仅能确保均能接收并同步记录下环境噪声信号,而且还保证了所有传感器之间的相关性。
传感器IVP-05-0.8/200连接到出口管的侧面和背面。加速度计布置在水轮机蜗壳壳体、支架基座、附近地面和15 m外的各点上,且加速度计轴线垂直于水流方向。最终每个点记录的信息是相似的,这表明在远程位置进行振动诊断的方案是可行的。
通过对混流式水轮机9种不同运行模式的研究分析,确定了水轮机减小转速与减小排水量的相互关系及最佳运行模式,同时指出了两种可能产生有害汽蚀的运行模式。
功率谱是一种强大的工具,可以生成相对于3D时间频谱分析(STAN)的2D功率谱曲线图。为了将工作台产生的谱峰与源自管中的谱峰区分开,比较了不同机器启动时的谱结果与来自测试运行的谱结果。通过分析工作台外壳和地板上的传感器信号,发现在这两个观察点,10 Hz及以上的特征最大频率较明显,从而表明水轮机振动传播远远超过工作台,如同在奇尔克伊水电站案例中,甚至在坝侧接头处也检测到了水轮机振动信号。
2.2 压力脉动监测方案
在奇尔克伊水电站监测方案的地震震动控制系统中,当地震发生时,水轮机随即启动。在应用滤波的情况下,系统的大动态范围允许在大坝接点和主厂房中的地震图上记录两种震动。这充分表明,如果地震监测与震动控制相结合,系统则能够将水轮机自身运动与由地震引起的位移自动区分开。
3 结果与讨论
3.1 试验台试验
3.1.1 传感器比较
通过同步记录两个传感器的信号,将不同设备的功率谱,特别是大于7Hz的谱值进行对比。在较低频率范围内,管道上测量的位移值明显比机盖上的大,这是由于在一定频率范围内对机器部件做了减振处理。
由于难以将输出信号转换为单一维度,因此将线性传感器(加速度计和IVP-05-0.8/200)和旋转传感器获取的数据进行对比是件复杂的事。然而,如果考虑信号的时间流,由于在空穴褶皱频率下的旋转运动,则可利用STAN图进行比较。
3.1.2 水力脉动识别
通过分析其中3种运行模式,包含来自传感器的信号、其测量水轮机附近的加速度和旋转振荡速度以及水轮机上的震动位移,线性传感器几乎无法区分操作方案,而旋转传感器能清楚地指示方案之间的差异,旋转频率始终显示为垂直线。
相干时间分析(CTAN)类似于STAN,其计算滑动时间窗口中两个记录的相干函数,三分量传感器的两个分量测量相位相关。
所有研究结果均表明,旋转振荡传感器在水力脉动检测上非常有效。也可以使用线性传感器、加速度计和振动位移检测器,但其效率均较低。
3.2 水轮机运行监测
在水轮机室中的加速度计STAN图(其中部件顺流向布置)上,具有明显的主旋转频率f0=3.33 Hz和 6.66 Hz、9.99 Hz的谐波。
STAN图日变化表明,当功率值从建议运行区域与非建议运行区域边界上快速下降到非建议运行区域中时,汽蚀发生。功率连续的快速增大,阻止了情况的进一步恶化,同时 2.7 Hz处的振荡消失。在大坝和侧缝上均可不同程度地检测到这些低频振荡。
4 结 语
本文提出了结合不同监测方法的新监测手段,且将其应用于高加索地区水电站的一系列监测系统上尚属首例。研究表明,震动诊断是水轮机地震监测的有效补充,可实现在水轮机出口处即时检测水流扰动。该系统可区分地震、水轮机启动和其他震动。
旋转震动传感器是重要的监测装置,与水轮机室中的加速度计一起安装时可以提高汽蚀危险检测的效率。
2017-06-30
1006-0081(2017)12-0017-02
P315
A
钱亚孙言译
(编辑:唐湘茜)
